Hasta el momento presente, nuestros estudios se limitaron a estudiar el circuito en estado estacionario, calcular voltajes y corrientes,
sin embargo sin variación en la frecuencia de la fuente
de la señal sinusoidal que alimentó el circuito.
A partir de este momento, estamos interesados en estudiar estos circuitos cuando están
sometido a un voltaje sinusoidal o fuente de corriente con frecuencia variable. Por lo tanto, la idea es mantener constante
la amplitud de la señal de la fuente sinusoidal en la entrada del circuito,
y cuando variamos la frecuencia de la señal, analizamos la señal resultante en su salida.
Con esto, obtenemos la llamada respuesta de frecuencia del circuito. Así,
vamos a obtener una descripción del comportamiento de estado estacionario sinusoidal de un
circuito en función de la frecuencia.
Hay dos propiedades importantes que debemos analizar: una es cómo se comporta la ganancia
del circuito cuando cambiamos la frecuencia en la entrada del mismo; otra es la variación
en la fase de la señal de salida en relación con la señal de entrada.
Podemos expresar matemática y gráficamente las funciones de ganancia y fase del circuito.
Didácticamente no es interesante trabajar con la función de ganancia de forma lineal.
Por lo tanto, se decidió expresar la ganancia mediante una función logarítmica .
Se ha definido una unidad de medida llamada Bel. Sin embargo, como Bel es un
unidad muy grande, se decidió dividirlo y luego apareció el decibelio . El decibelio
se define como la décima parte de Bel. Por lo tanto, podemos expresar la ganancia o
pérdida de un circuito en decibelios.
En el análisis de circuitos tenemos tres cantidades relacionadas que se pueden expresar en
decibelios, es decir, potencia, voltaje y corriente. La ecuación que define la ganancia o pérdida de potencia difiere de la ecuación que define la ganancia o pérdida de voltaje o corriente. Entonces, para potencia tenemos la ecuación dada a continuación.
eq. 57-01
Po es la potencia de salida y Pi la potencia de entrada.
En el caso de voltaje y corriente, las ecuaciones son:
eq. 57-02
eq. 57-03
Esta diferencia en las ecuaciones se debe a que la potencia es una función cuadrática, como por ejemplo
P = R I2 o también P = V2/R. Cuando, en la primera ecuación, reemplazamos P con cualquiera de las ecuaciones anteriores, al aplicar las propiedades de los logaritmos del término cuadrático comienzan a multiplicar el factor 10 por
2, resultando en 20 veces el logaritmo de la relación entre voltajes o corrientes.
Como el dB es una unidad extremadamente versátil, se han creado varios estándares
referenciado a diferentes valores. Veamos cuatro de ellos.
El dBm es un valor creado como referencia para comparar valores en decibelios de
diferentes sistemas. En comunicación, dBm es ampliamente utilizado, lo que establece el valor de
cero dBm cuando una carga de 600 ohmios disipa una potencia de 1 mW.
Por lo tanto, en la carga tendremos un voltaje de 0,775 V o 775 mV.
Por ejemplo, si medimos una potencia de 100 mW en una carga de 600 ohmios a la salida de un circuito, el valor en dBm será:
dBm = 10 log (100 / 1) = 20 dBm
También existe el dBu, que se ha convertido en una unidad estándar en audio profesional.
El estándar de potencia, en este caso el dBm, fue reemplazado por dBu que toma como
referencia el voltaje de 0,775 V o 775 mV, independientemente del valor de la carga.
Cuando trabajamos en el área de la acústica, es muy utilizado el término db SPL. SPL es la abreviatura del término en inglés "Sound Pressure Level". Traduciendo: "Nivel de Presión Sonora". Aquí la referencia es la intensidad de sonido más baja que el oído humano puede percibir. Este valor, simbolizado por Io, tiene un nivel de referencia de 10-12 W/m2. Por lo tanto, la ecuación que permite calcular el valor en dB SPL es dado por:
eq. 57-04
Entonces, cuando tenemos un sonido con una intensidad de I = 10-12 W/m2
tenemos cero dB SPL. Se I = 10-6 W/m2, entonces:
Lo llamamos diagrama o gráfico de Bode la representación gráfica de la
respuesta de frecuencia y fase de un sistema, utilizando la función de transferencia que representa la respuesta del sistema cuando hay variación en la frecuencia de la señal. Debemos introducir algunos términos usados en esta técnica que debemos entenderlos perfectamente.
Uno de ellos es la llamada OCTAVA.
Deja que sea una señal de frecuencia f. Si duplicamos esta frecuencia, decimos que la señal
"subió" una octava. Por otro lado, si dividimos la frecuencia por un factor 2, entonces decimos que el signo "bajó" una octava. Entonces, si decimos que la frecuencia de la señal subió 2 octavas , queremos decir que la frecuencia de la señal original se multiplicó por un factor 4. Si subían 3 octavas , la señal original se multiplicaba por un factor 8 . Podemos ver fácilmente que el factor multiplicador obedece la ley 2n, donde n es el número de octavas que la frecuencia de la señal ha cambiado. Tenga en cuenta que cuando la frecuencia disminuye, n asume valores negativos. Ejemplo de octava: el la4 (A5 en inglés) de 880 Hz está una octava por encima respecto a la3 (A4) de 440 Hz.
Hablando musicalmente podemos decir, basado en "es.wikipedia.org/wiki/Octava"
"El nombre de octava obedece al hecho de que la escala occidental recorre esta distancia después de siete pasos desiguales de tono y semitono.
Como los intervalos se cuantifican por una cifra que expresa el número de notas que comprende, incluidas las dos notas de los extremos,
este intervalo se denomina octava (por ejemplo do-re-mi-fa-sol-la-si-do)."
Otro término: DECADA.
La década, como su nombre lo indica, es una frecuencia diez veces más alta que la otra frecuencia tomada como referencia.
Deje que la frecuencia sea 1 000 Hz. A década arriba tenemos la frecuencia de
10 000 Hz . Y una década abajo tenemos la frecuencia de 100 Hz.
Otro término que debemos introducir es: FRECUENCIA DE CORTE.
La frecuencia de corte es la frecuencia a la cual el circuito comienza a mostrar una caída en su ganancia, siguiendo una curva asintótica.
Un término más: FASE de la señal.
Ya se ha estudiado que el valor de reactancia capacitiva y reactancia inductiva ,
dependen de la frecuencia de la señal a la que se envían. La impedancia de un circuito que contiene elementos reactivos puede expresarse mediante Z = R ± jX. Y el valor de la fase de señal viene dado por φ = arctg (±X/R).
Por lo tanto, es evidente que si cambiamos la frecuencia de la señal estamos cambiando el valor de la reactancia y, como consecuencia, cambiamos la fase φ del señal en la salida del circuito.
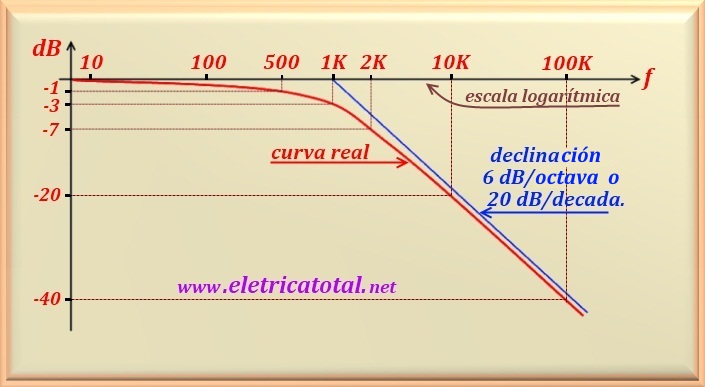
Circuitos que muestran una reducción o refuerzo en su ganancia en el orden de
6 dB / octava o 20 dB / decada (estos valores son equivalentes), se dicen
circuitos de primer orden. Los circuitos de segundo orden presentan valores de 12 dB / octava o
40 dB / decada. Con cada orden mayor, se agrega 6 dB / octava o 20 dB / decada al valor anterior.
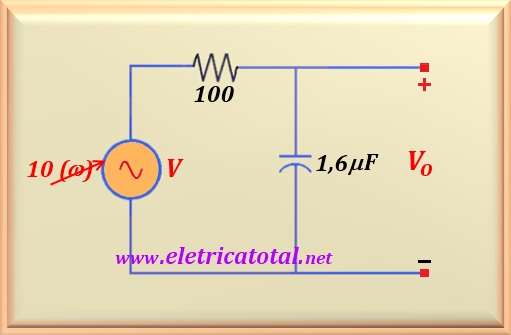
Figura 57-01
Analicemos el circuito que se muestra en Figura 57-01 calculando el voltaje de salida
Vo para diferentes frecuencias de la fuente de tensión. Es decir, analizaremos
la ganancia del circuito en función de la frecuencia. Para calcular el voltaje de salida haremos un divisor de vpltaje.
Tenga en cuenta que la resistencia en serie con el condensador forma una impedancia cuyo valor absoluto puede ser dado por
|Z| = √ (R2 + X2) y Xc = 1 / (ω C).
Considerando la frecuencia de 10 Hz tenemos |Z| = 9 947,67 Ω y
Xc = 9 947,19 Ω. Haciendo el divisor de voltaje, tenemos:
Vo = V (Xc / |Z|) = 10 (9 947,19 / 9 947,67) = 10 V
Observe que para cada frecuencia consideramos que habrá un nuevo valor para
Z y Xc.
Por lo tanto, esto generará un nuevo valor para Vo. Para
simplificar, presentamos los resultados en la Tabla 57-01 durante cuatro décadas, es decir,
variamos la frecuencia del valor de 10 Hz al valor de 100 000 Hz. Con esto, podemos analizar
cómo se comporta el circuito variando la frecuencia de la fuente de voltaje.
Tabla 57-01
Frecuencia (Hz)
Reactancia (Ω)
Voltaje de Salida (V)
Valor en dB
Fase en Grados
10
9 947,19
10,0
0
- 0,58
50
1 989,44
9,99
- 0,01
- 2,88
100
994,72
9,95
- 0,04
- 5,74
500
198,94
8,93
- 0,98
- 26,69
1 000
99,47
7,07
- 3,00
- 45,15
2 000
49,74
4,45
- 7,03
- 63,56
5 000
19,89
1,95
- 14,20
- 78,75
10 000
9,95
0,99
- 20
- 84,32
20 000
4,97
0,50
- 26
- 87,15
50 000
1,99
0,20
- 34
- 88,86
100 000
0,99
0,10
- 40
- 89,43
La tabla muestra que a medida que aumenta el valor de frecuencia de la fuente de voltaje, el voltaje sobre
el condensador disminuye, y para 100 000 Hz, el voltaje disminuye en uno
factor de 100 veces en relación con el valor máximo.
Por definición, la señal decae 3 dB a la frecuencia de corte del circuito. Mirando
en la tabla verificamos que esto ocurre en la frecuencia de 1 000 Hz. Entonces, para el circuito que
estamos analizando su frecuencia de corte es 1 000 Hz. Por otro lado, note que
para frecuencias por debajo de la frecuencia de corte el voltaje de salida es mayor que 70,7% de la señal máxima y
para frecuencias por encima de la frecuencia de corte el voltaje de salida es más bajo que 70,7%. Con los datos de
la tabla podemos crear un gráfico como el que se muestra en la Figura 57-02 para mostrar el comportamiento de la salida
del circuito en función de la frecuencia. Observe que en el eje de frecuencia usamos una escala logarítmica con la unidad en
hertz, y el eje de ganancia (vertical) está en dB.
Figura 57-02
Del gráfico podemos ver que en la frecuencia de fc /2 hay una caída de 1 dB,
y en la frecuencia de 2 fc una caída de 6 + 1 = 7 dB. Esta diferencia en 1 dB ocurre entre la curva
teórica y la curva real.
Con este ejemplo, aprendimos a graficar la ganancia en función de la variación de frecuencia proporcionada por la fuente de voltaje
que alimenta un circuito.
Luego aprendemos que en frecuencias donde la ganancia de voltaje es igual a 0,707 de su valor máximo, estas frecuencias
se denominan frecuencias de corte.
Así, en un amplificador tenemos una frecuencia de corte inferior, normalmente llamada f1, y una
frecuencia de corte superior, generalmente llamada f2.
Las frecuencias de corte también se conocen como frecuencias de media potencia porque la potencia en la carga es la mitad de la potencia de
valor máximo en estas frecuencias. Esto se debe a que la potencia en la carga es el cociente entre el cuadrado del voltaje y el valor de la
resistencia de carga. Dado que el cuadrado de 0,707 es igual a 0,5, esto da como resultado la mitad del valor de potencia en
banda media. Esta característica es extremadamente importante para la selección de componentes en sistemas de audio,
comunicaciones y procesamiento de señales, asegurando que sólo las frecuencias deseadas sean amplificadas o
se transmiten, mientras que los no deseados se atenúan.
Así, la banda media (o banda de paso) de un amplificador se define como la banda o rango
de frecuencias que se ubica entre
10f1 y 0,1f2. En la banda media podemos decir que la ganancia de un amplificador
es máximo y lo llamaremos Avm. Así, podemos afirmar que existen tres características importantes en un
amplificador: uno es la ganancia en la banda media, o Avm y las frecuencias limitantes, es decir,
f1 y f2.
Normalmente queremos que el amplificador funcione en la banda media. Sin embargo, hay situaciones en las que es necesario saber cómo se comporta
antes o después de las frecuencias de corte, es decir, fuera de la banda media. Entonces, conociendo los valores de Avm,
f1 y f2, podemos calcular la ganancia del amplificador para cualquier frecuencia f.
Por tanto, podemos tener dos situaciones que se describen a continuación.
1 - Respuesta por Debajo de la Banda Media
Debajo de la banda media podemos determinar la ganancia Av del amplificador a través eq. 57-06.
eq. 57-06
2 - Respuesta por Encima de la Banda Media
Por encima de la banda media podemos determinar la ganancia Av del amplificador mediante eq. 57-07.
Para completar este estudio, debemos presentar un gráfico que muestre la variación de la fase de la señal.
en la salida en función de la frecuencia. En la tabla anterior, la columna de la derecha representa la fase.
La fase se calcula a partir de la ecuación del divisor de voltaje utilizando los fasores apropiados.
Vo = [ V (Xc ∠ -90 ) / √ (R2 + Xc2)]
Como estamos interesados en la fase θ, trabajando algebraicamente la ecuación anterior
en la forma Vo / V llegamos a:
θ = - arctg (R/Xc)
El ángulo θ representa la diferencia de fase entre Vo y V.
Como el valor de θ siempre es negativo, excepto en f = 0 Hz , el voltaje
Vo siempre es atrazada en relación con V . Por esta razón este circuito
se conoce como circuito de retardo. En la Figura 57-03 podemos ver la gráfica de fase.
Figura 57-03
Tenga en cuenta que a la frecuencia de corte la fase de
Vo está atrazada con relación a V de 45°. Sabemos que a esta frecuencia
XC = R, resultando en un cociente entre las dos variables igual a 1. Con esto, fácilmente
concluimos que θ = 45°, por que arctg 1 = 45°.