From this moment on we are studying the electric circuits and their behavior in relation to the
alternating current. We will begin by introducing the concept of phasors and show how useful this
tool is for calculations involving frequency dependent variables.
We are fundamentally interested in the response in steady state when the circuits are excited by
senoidal or cossenoidal functions. Thus, the initial and transient conditions will be ignored. It is
worth emphasizing that by using trigonometric functions, it is fundamental for the student to master
this mathematical content. Otherwise, it will be difficult to understand all the transformations necessary
to solve problems. Also, knowledge about complex numbers is also important.
One of the first things to note is that the sine and cosine
are out of phase with each other by 90°. The cosine function is advanced by 90°
in relation to the sine function.
Figura 51-01
Note the graphs of the sin (x) and cos (x) function in the figure by side. Here we perceive
clearly what we said above.
On the other hand, we will always represent the sources of voltage or current, by functions
sine or cosine. A characteristic of these functions is that they are periodic and their period
is equal to 2 π radians.
It is perfectly possible to express a sine function as a cosine function
and vice versa.
Be a voltage source described by the following function:
v = Vmax sin (ω t + φ) volts
One of the parameters that is present in the function is Vmax. The value of
Vmax indicates the maximum value that v reaches (see the figure above).
When we multiply this value by sin (ωt), we have the value of v for any moment t.
Therefore, the value of v (written in lowercase) is known by instantaneous value.
Vmax, in many technical literatures, is known as peak value, and can be
represented by Vp.
We should not forget that the sine function varies from -1 to +1 . Therefore,
the total variation of v, is between - Vmax and + Vmax.
This value is commonly known as peak-to-peak value. The same thing happens if we represent v as a
cosine function, since it also varies from -1 to +1 .
Another parameter that appears in the equation is ω, which is known as
angular frequency and is related to the frequency of the function by the following equation:
ω = 2π f rad /s
One more parameter: φ, which represents the angular displacement in relation to the
axis x. This parameter is also known as phase.
The function variable is represented by the letter t (time). Thus, we can calculate the value of
v at any instant t that we wish.
Let us recall the relation between frequency f and the period T, as we can see in the equations below.
T = 1/ f ou f = 1/ T
The period T is measured in seconds and the frequency f is measured in hertz.
The phase relations that exist in trigonometric functions can be represented
by spinning phasors. What is this? We can draw a phasor radius in a circle
and stipulate an initial value for the angle φ.
Figure 51-02
In the Figure 51-02 we see an example of an V phasor out of an angle φ
in relation to the phasor U. We adopted the trigonometric convention where phasors always
turn counterclockwise.
Then, we notice that the phasor V is ahead of the phasor U from an angle φ.
By convention we say that the phasor U is with phase 0° and from that point all other
phasors will be related to it. In this way, the ´hasor V is ahead of φ degrees relative to the phasor U.
Supposing φ = 60° and Vmax = 4 then we can represent the two phasors by the following functions:
U = 4 sin (ω t + 0°)
V = 4 sin (ω t + 60°)
Let's see how we can represent these functions in a graph in terms of
ampitude x phase. See the Figure 51-03
Figure 51-03
A very common mistake students make is to represent the angle φ (in advance)
to the right side of the reference point and not to the left side. But if we think that
being advanced means coming "before", then it becomes clear that the sine wave is advanced
you must pass "before" by the reference point. This justifies the figure above.
As previously stated, it is very easy to turn sine into cosine and vice versa.
Let's see how these transformations can be made.
To do so, we will show a diagram that greatly facilitates these transformations. Remember that we turn
in counter-clockwise. Again it becomes clear that the cosine function is
advanced by 90° in relation to the sine function.
Figure 51-04
See how we can represent the phasor A shown in the Figure 51-04. Note that this
phasor is delayed by 30° with respect to the axis of + cos. By the figure, the amplitude of
the phasor is equal to UM. Therefore, we can write that:
A = cos (ω t - 30°)
Note that since the phasor A is delayed, we specify this by placing the negative signal
in front of the angle.
Let's see how to transform this phasor into the sine function. Note that in relation to the
+ sine axis phasor A is advanced by 60°, so we must use the positive signal in front
of the angle. Like this:
A = sin (ω t + 60°)
The other two ways we can write phasor A is by using the negative forms of the sine and cosine functions.
Pay attention to the fact that in relation to - cos, vector A is ahead of
150° or, what is the same, delayed by 210°. Therefore, in relation to
- cos, we can write in two different ways, that is:
A = - cos (ω t + 150°)
A = - cos (ω t - 210°)
In relation to the - sin function, we should be aware that phasor A is ahead of 240° or,
what is the same thing, delayed by 120°. Therefore, in relation to - sin, we can write in
two different ways, that is:
A = - sin (ω t + 240°)
A = - sin (ω t - 120°)
See how easy it is to do the transformations using the diagram above. Now let's write
the phasor B using the same principle. Try to understand what was done.
B = sin (ω t + 210°) or B = sin (ω t - 150°)
B = cos (ω t + 120°) or B = cos (ω t - 240°)
B = - sin (ω t + 30°) or B = - sin (ω t - 330°)
B = - cos (ω t + 300°) or B = - cos (ω t - 60°)
Attention
In order to compare phases between two sine waves, both must be written as sine
function or cosine function. That is why it is important to know how to transform one function into another.
In addition, both must have the same frequency,
as well as positive amplitudes.
Let us assume two waveforms with phases according to the equations below:
v = 5 sin(ωt + 50°) V
i = 3 cos(ωt - 120°) A
Notice that we have two equations with different functions. So let's turn the function
cosine function for the sine function. Thus, we are:
i = 3 sin(ωt - 120°+ 90°) A or i = 3 sin(ωt - 30°) A
Figure 51-05
Now we can calculate how many degrees the two waveforms are out of phase with each other,
because they are expressed in the same trigonometric function. Note that the equation representing i
is delayed by 30° with respect to the y-axis. And the equation that represents v is
advanced by 50° with respect to the y-axis. Thus v is 80° advanced in relation to
i, as we can easily see in the Figure 51-05.
We can represent a current or sinusoidal voltage at a given frequency by two parameters: an
amplitude and a phase angle. The complex representation of an electric current or voltage is
also characterized by these same two parameters. Thus, the connection between sinusoidal signals and complex
numbers is provided by the so-called Euler relation:
e j(ω t + φ) = cos (ω t + φ ) + j sin (ω t + φ )
So, to develop the concept of PHASOR, we must adopt the fact that we can write the
functions sine and cosine in the following form:
cos φ = Re {e j φ } and sin φ = Im {e j φ }
In the equation above, Re represents the "real part of" and Im represents the
"imaginary part of".
So we can choose how to represent the sinusoidal functions, if in the form of a cosine or
sine. In this site we will give preference to the cosine form. Thus, a time-dependent
function can be written as below:
v = Vmax cos (ω t + φ)
This means writing:
v = Vmax Re {e j(ω t + φ)} =
Vmax Re {e j ω t e j φ}
We can further develop this equation. Like this:
v = Re {(Vmax e j φ)
e j ω t} = Re {V e j ω t}
Thus, the Phasor representing a sinusoidal function can be written as:
V = Vmax e j φ = Vmax cos (φ) + j Vmax sin (φ)
In the above equation, the written form with the exponential function is called POLAR form,
while the written form with the sine and cosine functions is called the RECTANGULAR form.
So we can say that a voltage or electric current is defined exactly if the amplitude and the
phase are specified. If we have knowledge of frequency in a circuit, all we need to know
is the quantities mentioned above. In this way, we can simplify the notation using the polar
representation in the complex form, reducing to:
V = Vmax ∠ φ
This simplified complex notation is what we call PHASOR and will be the form adopted in this site.
Important Note -
"Note that when we use the phasor notation, we lose the information
referring to the frequency. Therefore, at the beginning of this item, it was said that
the phasor is valid for a given frequency."
In the solution of electric circuits we will have to add phasors almost every moment.
So let's learn how to add phasors. Suppose we have two electrical voltages
described by the following equations:
v1 = 3 sin(ωt + 0°) volts
The other voltage is:
v2 = 4 sin(ωt + 90°) volts
What we want is to calculate the sum vsum = v1 + v2.
Note that the two voltages are offset by 90° from each other. In this particular case, we can
apply the Pythagorean theorem to find the resulting magnitude module of this sum.
|vsum| = √ (32 + 42) = 5 volts
Now we must calculate the angle between vsoma and the axis x.
Since we are in front of a right triangle, we simply calculate the arctangent of the quotient
between the opposite side and the adjacent side, or:
φ = tg-1 ( 4/ 3 ) = 53.13°
Since we have the amplitude and the phase calculated, we can write the resulting voltage
in the trigonometric form and in the polar form, that is:
vsum = 5 sin(ωt + 53.13°) volts
Vsum = 5 ∠53.13° volts
Figure 51-06
See in the Figure 51-06 the phasor diagram (left) showing the result of the sum of the two voltages
as well as (to the right) the trigonometric representation of the voltages and their sum.
Of course, today almost all modern calculators have the functions of transformation
from Cartesian functions to polar and vice versa. The intention was to show, step by step, how
we can calculate the parameters needed to solve problems using basic mathematics.
The solution of the above example was easy because the angle between the two phasors was 90°.
Thus, it was possible to use the Pythagorean theorem. When the angle is not 90°, 180° or
270° we have to use the so-called law of cosines.
We must pay close attention to this law because it has been developed to find the third side of
any triangle, as long as we know any two sides and the angle between them.
Figura 51-07
See the representation of a triangle in the Figure 51-07. The sides a, b and the angle
φ formed by them were provided. We must determine the third side symbolized by the letter
x. Using the law of cosines, let's get the length of the third side that "closes" the triangle.
The equation of the law of cosines is shown in eq. 51-01.
However, when working with phasors or vectors,
finding the third side means computing the subtraction of phasors or vectors. Therefore, if we use this
equation with the data of the triangle shown in the figure above,
we will be calculating the subtraction and not the sum of the phasors or vectors.
eq. 51-01
So to compute the sum of phasors or vectors, we must make a small change in the equation,
as shown below. Notice the swap of the subtraction signal by the addition sign in the
last installment. With that we solve the problem. Thus, we can use the angle φ to be the angle
between two phasors. Another way is to keep the minus signal and use the angle with your add, or
180° - φ. The result will be the same. In this site we will use, for simplicity, the equation shown below.
eq. 51-02
In addition, if we know the dimensions of the three sides of the triangle we can calculate the angle between any two sides.
We just work algebraically on eq. 51-01 and, taking as a reference the triangle shown in the figure above, we obtain:
eq. 51-03
Example 51.3.2
Let us assume that we have two phasors represented by A = 10∠60° V and B = 12∠0° V
a) Calculate the phasor V1 = B - A.
b) Calculate the phasor V2 = A + B.
Solution
Item a
Figure 51-08
See in the Figure 51-08 the representation of the two phasors and also the representation of the resulting phasor,
given by V1 = B - A. Notice how the phasor resulting from the subtraction of the two
phasors "closes" the triangle. As indicated in the figure and according to the problem statement,
the angle between the phasors is 60°.
Since we want the subtraction of the phasors we will apply the eq. 51-01.
Looking at the equation we noticed that the x of the equation is V1.
Thus, substituting for the numerical values, we have:
V12 = 102 + 122 - 2 x 10 x 12 cos(60°)
Performing the calculation, we get:
|V1| = 11.136 volts
This found value is the module of V1. We must calculate the angle that
V1 makes the axis horizontal. For this, we use the eq. 51-03 shown above.
We must pay close attention to who will be x in the equation. x it will always be the
side opposite the angle that you want to determine. Thus, in this case, the phasor A will be
the x, since it is the opposite side at the angle φ to be determined.
Then, doing the numerical substitutions:
cos φ = (122 + 11.1362 - 102) / 2 x 12 x 11.136 = 0.629
To determine the φ angle, we apply the arccos function to the found value. Soon:
φ = arccos(0.629) = ± 51°
Note, however, that the phasor arrow V1 points down. Then the correct value of angle
φ is negative because it is below the horizontal axis. Therefore, phasorally, we can write
V1 as:
V1 = 11.136∠-51° volts
Note that if you were asked to calculate A - B, the module of the V1 would not
change, only the angle would be out of 180°. Then, A - B = 11.136 ∠129°. That is, it
would only change the direction of the arrow that would be pointing upwards.
Item b
Figura 51-09
See in the figure to the side the representation of the two phasors and also the representation of
the resulting phasor V1 = A + B. Notice that we graphically use the
parallelogram rule to compute the resulting phasor V1.
To find the value of the module from V1, let's use the eq. 51-02 ,
because we are performing a sum of phasors. In this equation, x is represented by V1.
Therefore, by doing the numerical substitution we have:
V12 = 122 + 102 + 2 x 12 x 10 x cos 60°
By performing the calculation we find the value of the module of V1, or:
|V1| = 19.08 volts
We must calculate the angle φ. Using the eq. 51-03 and knowing that the side opposite
the angle φ is represented by the phasor A, then:
cos φ = (122 + 19.082 - 102) / (2 x 12 x 19.08 ) = 0.891
To determine the angle φ, we apply the arccos function to the found value. Soon:
φ = arccos(0.891) = 27°
Now we can write the resulting phasor in the form phasorial, or:
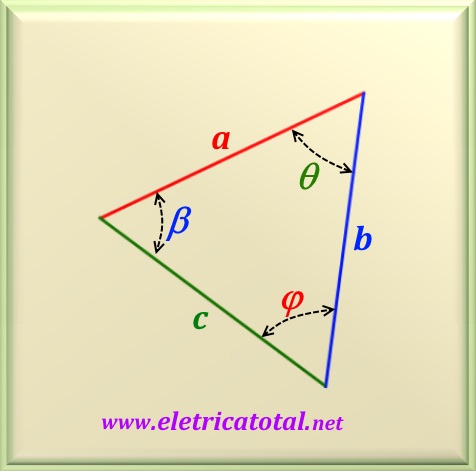
Another law of extreme importance related to triangles is the sine law. In the figure below,
we see a triangle with its three sides and its three angles. This law allows, given any three variables,
to calculate the other three.
Figure 51-10
In the Figure 51-10 we see a triangle called acutangle (any internal angle is less than 90°).
In truth, this law holds for any type of triangle, whether acutangle, obtusangle, or rectangle.
In addition, we must not forget that for any type of triangle, the sum of all internal angles must
be equal to 180°. Like this:
φ + β + θ = 180°
We show the equation that defines the sine law in the figure below. Notice that there is a relation
between the size of the side of the triangle and the angle OPPOSITE on the side (represented by
the same colors in the figure above). The larger the side of the triangle, the greater the value of the
angle OPPOSITE on the side, and vice versa.
eq. 51-04
Example 51.3.3
Let's go back to example 51.3.2 and calculate the calculated angles in the a and b item,
but now using the Sine law.
Item a
Looking at the figure from the item a of example 1, we see that the side opposite the angle
φ is the phasor A. And the side opposite the angle of 60° is the resulting
phasor V1. Therefore, we know two sides and an angle. This allows the use of the
sine law. Thus, we can write:
V1/ sen 60° = A / sin φ
Making the substitution by the numerical values, we have:
11.136 / 0.866 = 10 / sin φ
After the calculation, we have:
sin φ = 0.777 ⇒ φ = 51°
That is the same value found previously. We must change the angle signal because it is below the horizontal axis.
So, φ = -51°.
Item b
Looking at the figure of the item b of example 1, we see that the side opposite the angle
φ remains phasor A. This phasor makes an angle of 120° with the horizontal.
And this angle is opposite to V1. Recalling that in the b item the module of
V1 is equal to 19.08. In this way, we can write:
V1/ sin 120° = A / sin φ
By making the substitution by the numerical values, we have:
19.08 / 0.866 = 10 / sin φ
After the calculation, we have:
sin φ = 0.454 ⇒ φ = 27°
Once again there was agreement with the value previously found. Therefore it is up to each student
to find the angle between phasors by the method he deems most appropriate.
In the previous items was presented an idea of how we can represent phasors through trigonometric functions. But these functions bring a complicating factor, since there is often a need for terms that transform one function into another. A more intelligent way is to represent phasors through complex numbers, since operations with these are much simpler.
Complex numbers can be represented in the rectangular form and in the polar form.
As we know a complex number is represented in the rectangular form obeying
the equation:
z = x ± j y
Here we represent the imaginary by the letter j, unlike the one used in mathematics, in which it is represented by the letter i. However, as in electricity we represent the instantaneous current by
letter i, in the technical literature we chose the letter j to avoid confusion of interpretation.
Figure 51-11
In the Figure 51-11 we see the representation of the complex number Z in a Cartesian plane.
In the vertical (ordinate) is the imaginary part, while in the horizontal (abscissa) is the part
real.
From the graph we see that the real part is represented by the number 8,
while the imaginary part by the number 6.
It is already possible to realize that it is very easy to pass from the rectangular form to the polar form. Let's see how it goes.
Let's take advantage of the previous graph and pass the complex number in the rectangular form to the polar form.
To do so, let's use the eq. 51-05 shown below:
eq. 51-05
Note that to calculate the module just use the Pythagorean theorem, that is:
|Z| = √ (62 + 82) = 10
Calculated the module, we need to calculate the angle. For this, we compute the arctan of the quotient
between the imaginary part and the real part of Z.
Soon:
φ = tg-1 ( 6/ 8 ) = 36.87°
Then the complex number Z becomes perfectly defined written in the polar form as described below:
Z = 10 ∠ 36.87°
Of course we can move from the polar form to the cartesian form, obeying the eq. 51-06
and eq. 51-07 shown below.
eq. 51-06
eq. 51-07
To finalize this example, using the above equations we will find the Cartesian form of the number Z.
x = 10 cos 36,87° = 8
y = 10 sin 36,87° = 6
Therefore, after the calculations, we return to the Cartesian form as we can see below:
In item 3.2 we learn to sum or subtract phasors using the cosine law. However, a more practical and faster way is to use the complex notation. If the phasors are in polar notation, we can transform them into rectangular notation and add them using the same principle as the sum of vectors. To illustrate this method let's look at example 51.4.3.
Example 51.4.3
Let the voltage phasors (in volts) given by:
A = 25∠30°, B = 20∠75° and C = 30∠175°
Find the resulting phasors Vsum = A + B + C and Vsubt = C - A.
Solution
Since the three phasors are in polar form, we can pass them to the rectangular form. Like this:
A = 21.65 + j12.5 volts
B = 5.18 + j19.32 volts
C = -29.89 + j2.61 volts
Now just add algebraically real part with real part and imaginary part with imaginary part.
In this way, we obtain:
Vsum = A + B + C = -3.06 + j34.43 volts
And we can transform into the polar form, using eq. 51-05, or:
Vsum = A + B + C = 34.57∠95.08° volts
To calculate Vsubt = C - A we use the same method. Then we find:
Vsubt = C - A = -51.54 - j9.89 volts
Transforming to the polar form, we obtain:
Vsubt = C - A = 52.48∠-169.14° volts
Note the ease of finding sums and subtractions of phasors with this method.
Let us establish the algebraic relations that govern the phasor relations of voltage and current in
the passive devices that we have studied up to this moment. Realize that when doing
the transformations of the trigonometric functions to the phasorial form, we are in fact
transforming the time domain into the frequency domain. Let's study
as the frequency variation changes the behavior of these devices.
5.1 RESISTOR Behavior
We know that a resistor obeys Ohm law, and this law tells us that there is a direct
relation between the electric current that crosses the resistor and the voltage
that it develops between its terminals. Like this:
v(t) = R i(t) volts
And if by the resistor circulates a current given by the function:
i(t) = Imax sin(ωt + 0°) volts
Then the resistor will not modify any parameter of the electric current, resulting in a voltage with
the same parameters of the electric current and with
an amplitude that will be the product of the value of the resistor by the value of the electric current, that is to say:
vmax(t) = R Imax sin(ωt + 0°) volts
In the polar (or phasor) form we can write:
Vmax ∠0° = R Imax ∠0° volts
In other words, the voltage-current relation in the phasor form for a resistor obeys the same relation
between voltage and current in the time domain.
This means that a resistor does not change the phase between current and voltage.
To begin to study the behavior of the capacitor against a sine wave
we must first introduce the concept of reactance. Capacitive reactance is the
difficulty or resistance that the capacitor offers to the passage of an alternating electric current.
In other words, when the electric current has a frequency different from zero
the capacitor acts as a frequency-dependent resistance. The relation that
defines this "dependency", called capacitive reactance and is represented by Xc
is given by:
Xc = 1 / (ω C) = 1 / (2πf C) Ω
eq. 51-08
Onde as variáveis são:
Xc - capacitive reactance whose unit of measure is ohm
ω - angular frequency whose unit of measure is radians / second
f - wave frequency whose unit of measure is hertz
C - Capacitance whose unit of measure is farad
It is easy to see from the equation that the higher the frequency of the wave, the smaller the capacitor reactance. And vice versa.
Now we can understand why in direct current the capacitor has an infinite
impedance, since we know that in this case, f = 0.
Now let's analyze mathematically how this reactance behaves when subjected to a voltage
with a frequency other than zero.
The equation that relates, in the time domain, the current to the applied voltage in a capacitor is given by:
eq. 51-09
Let us assume that the capacitor is subjected to a voltage described as follows:
v(t) = Vmax sin(ωt + 0°) volts
Let's calculate the electric current that will circulate through the capacitor. To this end, we must
calculate the derivative of the voltage applied to the capacitor as required by the equation of
i(t) (above). With that, we arrive at:
i(t) = ω C Vmax cos(ωt + 0°) A
Notice that we are facing a cosine function. To compute the phase between i (t)
and v(t) we must have the two expressions with the same trigonometric function. So let's turn
i (t) into the function sine. Then we get:
i(t) = ω C Vmax sin(ωt + 90°) A
Note that we can now state that the electric current in the capacitor is
90 ° with respect to the voltage applied thereto. Also, note that ω C
is nothing more than the inverse of the capacitive reactance. So we have to:
Imax = ω C Vmax = Vmax / Xc A
See that the above equation is exactly the law of Ohm for alternating current.
In this way, we obtain an equation that defines the electric current that circulates through the capacitor, or:
The inductor, like the capacitor, has an inductive reactance and its value also
depends on frequency. The relation that defines the inductive reactance, represented by
XL, is given by:
XL = ω L = 2πf L Ω
eq. 51-10
Onde as variáveis são:
XL - inductive reactance whose unit of measure is ohm
ω - angular frequency whose unit of measure is radians / second
f - wave frequency whose unit of measure is hertz
L - inductance whose unit of measure is henry
By the equation we realize that the higher the frequency of the larger wave is the
inductive reactance . And vice versa. It has now become easy to understand why the inductor behaves as a short circuit to direct current. Of course, for direct current we have f = 0,
then XL = 0 .
Now let's analyze mathematically how this reactance behaves when subjected to a
electric current with a frequency other than zero.
The equation that relates the voltage to the current that flows through the inductor is given by:
eq. 51-11
Let us assume that the inductor is subjected to a current described as follows:
i(t) = Imax sin(ωt + 0°) A
Now we can calculate the electrical voltage that will arise at the inductor terminals.
For this, we must calculate the derivative of the electric current applied to the inductor
according to equation v (t) (above). With this, we arrive at:
v(t) = ω L Imax cos(ωt + 0°) volts
Notice that here we are also facing a cosine function. To compare the phase
we must have both expressions with the same trigonometric function between i (t) and
v (t). So let's turn v (t) into the function sine. Then we get:
v(t) = ω L Imax sin(ωt + 90°) volts
Note that we can now state that the electric current in the inductor is
90° delayed in relation to the electrical voltage between its terminals. Also, note that
ω L is nothing more than the inductive reactance. So we have to:
Vmax = ω L Imax = XL Imax volts
See that the above equation is exactly the law of Ohm for alternating current.
In this way, we can get the equation of the electric voltage on the inductor, or:
We must be aware of the fact that the resistor is the only passive element that behaves
same way for both direct and alternating current. In other words, the
of the wave frequency does not change its behavior. We can no longer say the same for the capacitor
and the inductor, because for these components, the reactance depends not only on the value of the capacitance or inductance, as well as the frequency in which they work.
When we combine these three passive elements, whether in series, parallel, or mixed association, in
a circuit, we define impedance as the ratio between the phasor voltage and the
phasor current, and symbolize the same by capital letter Z. Therefore, the impedance is a complex magnitude and is measured in ohms. It is not a phasor, that is, we can not turn it into the domine of time.
Thus, all algebraic manipulations that involve them must obey those applicable to
complex numbers.
Let's look at a basic circuit consisting of a resistor and a capacitor in series.
Figure 51-12
See in the Figure 51-12, the circuit that we will analyze. From the equation of v
(shown at the bottom of the circuit to the side) we already obtain the information of
Vmax = 156.2 volts . On the other hand,
the term that accompanies t is the angular frequency, or ω = 500 rad /s.
Since there is nothing written after ω t, this indicates that the phase
of v is φ = 0°.
So we have all the information we need to start the calculations. Initially we will calculate the capacitive reactance of the capacitor. As
C = 20 x 10-6 F, we have that:
- j XC = 1/ j (ω C) = 1/ j (500 x 20 x 10-6 ) = - j 100 Ω
Note in the above equation that we use the properties of complex numbers, allowing us to write 1 / j = - j .
Now we can write the capacitive impedance of the circuit in complex form, or:
Z = R - j XC = 120 - j 100 Ω
You can write this impedance in polar form from the rectangular form (above):
|Z| = √ (R2 + XC2) = √
(1202 + 1002) = 156.2 Ω
φ = tg-1 ( XC / R) = tg-1 (-100/ 120) = - 39.8°
Thus, the polar form for the impedance can be written using the eq. 51-05, or:
Z = |Z| ∠ φ = 156.2 ∠-39.8° Ω
With this information we can calculate the current i and the electric voltage in each component.
Using polar notation, which simplifies enough calculations, we have:
i = 156.2 ∠ 0° / 156.2 ∠ -39.8° = 1 ∠+39.8° A
Notice that this angle of + 39.8° is representing that the electric current in the circuit is
advanced 39.8° in relation to the voltage applied to it. In addition, how we use
Vmax in the calculation, then this current is the maximum current.
If we wish to express the value of the electric current in the trigonometric form,
we should write:
i = 1 sin (500 t + 39.8°) A
With the value of i, we can calculate the voltage on the resistor and in the capacitor , that is:
In the Figure 51-13 we present the phasor graph of the circuit. For reference we use the
voltage v. Then we can clearly see that the current i is advanced 39.8° in relation to v.
Since the resistor does not change the phase of the current, the voltage across the resistor (VR)
is in phase with i. As we know the tension in the
capacitor (VC) is delayed by 90° in relation to the electric current i. This can be easily
verified in the graph and analytically we can write that
φ = 39.8° - (- 50.2°) = 90°.
Attention
"Many students try to "prove" that the results found are correct by adding
algebraically the values of VR and VC and are surprised when
find V = VR + VC = 120 + 100 = 220 volts which is a completely different
value from the given value. This happens because we must sum the voltages
as phasors and not algebraically."
So to find the correct value we must calculate this way:
V = √ (VR2 + VC2) = √
(1202 + 1002) = 156.2 volts
So stay tuned for details and never "think" to add algebraically
two voltages or currents that are out of phase with 90°. Note also that only
it was possible to use the above equation, because the two voltages are out of phase
90° between them and this allows the use of the Pythagorean theorem.
If the angle was different from 90°, 180° or 270° we should use the cosine law.
Let us study the impedance presented by an R-L circuit from
of a basic circuit consisting of a resistor and a series inductor.
Figure 51-14
See the Figure 51-14 the circuit that we will analyze. From the circuit we have no information about the angular frequency.
Let us assume that the angular frequency, or ω = 1 125 rad/s.
We know that the phase of v is φ = 0°. So we have all the information you need to start the calculations.
On the other hand, we know that XL = ω L. So let's calculate the value of
inductive reactance, knowing that L = 53.32 mH.
XL = ω L = 1 125 x 53.32 x 10-3 = 60 Ω
In this way, we can write the impedance of the circuit in its complex form. Like this:
Z = R + j ω L = 10 + j60 Ω
To write this impedance in polar form, we need to know the angle and the module (or absolute value) of the impedance.
Let's first calculate the angle.
φ = tg-1 ( XL/ R) = tg-1 (60/ 10) = +80.54°
For the value of the impedance module, we have:
|Z| = √ (R2 + XL2) = √
(102 + 602) = 60.83 Ω
Now we are able to write the impedance in its polar form.
Z = |Z| ∠ φ = 60.83 ∠+80.54° Ω
With the knowledge of the value of the impedance and the voltage that feeds the circuit,
we can calculate the electric current I.
I = v / Z = 220 ∠0° / 60.83 ∠+80.54° = 3.62 ∠-80.54° A
We can write I in its trigonometric form, that is:
I = 3.62 sin (1 125t - 80.54°) A
To complete the analysis, we will calculate the electrical voltage on the resistor and on the inductor. For the resistor we have:
VR = R I = 10 x 3.62 ∠-80.54° = 36.20 ∠-80.54° V
And for the inductor we have:
VL = XL I = 60 ∠+90° x 3.62 ∠-80.54° = 217.20 ∠+9.46° V
As a check, we will calculate the value of v from the values of
VR and VL.
v = √ (VR2 + VL2) = √
(36.202 + 217.202) = 220.20 V
In the same way as we did for direct current (DC), where we define the conductance
as the inverse of the resistance, for the alternating current (AC),
we will define the ADMITTANCE as the ratio between the phasor current and the phasor voltage
on an element of the circuit. Just as the impedance is a complex quantity,
the admittance is also a complex quantity.
eq. 51-12
The real part of the admittance, we call as conductance,
G and the imaginary part, as susceptance, B. That way we can write:
eq. 51-13
Attention
"Pay close attention to the fact that the above equation is not saying that the real part
of the admittance is equal to the inverse of the real part of the impedance. Not even
if the imaginary part of the admittance is equal to the inverse
of the imaginary part of the impedance."
The unit of measure of admittance, conductance, and susceptance is SIEMENS.
Knowing the values of admittance, G and susceptance, B, we can calculate
the values of resistance, R and reactance, X
of the circuit using eq.51-14 and eq.51-15, as shown below.
eq. 51-14
eq. 51-15
Knowing the values of resistance, R and reactance, X, we can calculate
the values of admittance, G and susceptance, B
of the circuit using eq.51-16 and eq.51-17 , as shown below.
eq. 51-16
eq. 51-17
The equations mentioned above are valid when we have an RC series circuit or an RL series circuit.
If we have a RL parallel circuit or a RC parallel circuit we must use the equations below,
being eq. 51-18 for the case of Parallel RL and eq. 51-19 for the case of Parallel RC.