16. - Determining the Parameters of an I. M.click here!
In the previous chapter we saw that synchronous motors have very limited application in industry, mainly because they do not have the ability to start without some assistance. To fill this gap, the so-called induction motor arose, also known as asynchronous machine, because, unlike the synchronous motor, it does not have the capacity to rotate at a speed synchronous with the supply network frequency. And they are called induction because the voltage on the rotor is
induced in the rotor windings without the need for a DC field current to run the machine.
In addition, the induction motor has the ability to start without any external assistance. The asynchronous machine can also function as a generator. However, it has many disadvantages and its use is restricted to special applications. In this chapter, the focus is on the
three-phase induction motor.
Physically, the stator of an induction motor is similar to that of a synchronous machine. basically there is
two different types of induction motor rotors that can be placed in the
inside the stator. Are they:
1 - Squirrel cage rotor
2 - Wound rotor
The squirrel cage type rotor consists of a series of conductor bars that are fitted inside
of grooves on the surface of the rotor and short-circuited at both ends by large short-circuit rings.
This constructive form is known as rotor of
squirrel cage because, if the conductors were examined singly, they would be similar to those wheels on which squirrels or
hamsters run around doing exercise.
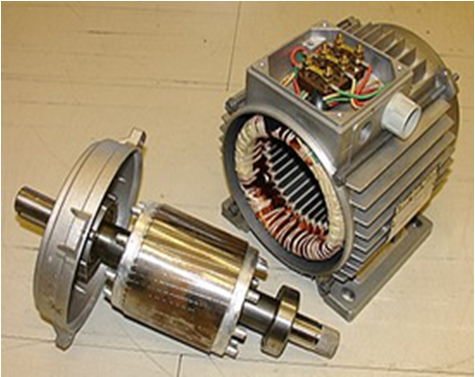
At the bottom of the photo shown in Figure 107-01, you can see the squirrel cage type rotor. On top,
we have the stator and its winding. In the upper part of the frame, we have the motor connection terminals to the power supply.
Figure 107-01
In turn, the wound type rotor has a set
complete set of three-phase windings that are similar to stator windings. The three phases of the rotor windings are
usually linked in star and its three
terminations are connected to slip rings on the rotor shaft. The windings of
rotor are accessed through brushes that rest on the rings
sliders. In order to obtain the induction effect, the rotor windings are short-circuited among themselves.
However, the short circuit of the windings is not done directly on the wound rotor, but through the brushes, externally.
Therefore, in wound-rotor induction motors, it is possible to make modifications such as, for example, externally inserting
extra resistances in the rotor circuit, via brushes. Thus, it is possible to take
take advantage of these attributes to modify the torque x speed characteristic of the engine.
These resistors, introduced via brushes, are actually rheostats (resistors that can have their value varied
manually) that can assume from a maximum value to a minimum value in order to limit the starting current of the motor. so it is
starting the motor with the rheostat at its maximum value to obtain a small starting current. After the engine starts,
the rheostat value is gradually reduced until the motor reaches rated speed. It is important to correctly dimension this
rheostat because, in addition to being used to start the engine, it is also possible to use it to control speed and torque
engine in normal operation.
Wound rotor induction motors are more expensive than squirrel cage induction motors. They demand a lot
more maintenance due to
wear associated with your brushes and slip rings. As a result, engines
wound winding induction are used in special cases.
Figure 107-02
In Figure 107-02 we see a wound rotor with the three slip rings and the three brushes.
It should be noted that the stator of asynchronous machines is built using stacked silicon steel sheets
in order to reduce losses due to eddy current and magnetic hysteresis. And the rotor material is of high permeability
magnetic field, so that it is possible to create a high magnetic field with small induced electromotive forces.
The rotor of the induction machine is normally mounted
inside the stator concentrically, using a system
of bearings to support the mechanical structure of the machine.
Between the rotor and the stator there is an air gap which is called
air gap or gap, where the electromechanical energy conversion takes place.
When the stator winding is powered by a source
three-phase AC, a rotating magnetic field appears in the windings, BS,
that crosses the air gap and the rotor, inducing voltage in the rotor (of the
wound) or in short-circuited conductors (squirrel cage), causing the
rotor energization occurs only by induction. If the winding
wound rotor is placed in short circuit, making a circuit
closed, induced currents will circulate that will produce a
magnetic field in the rotor, BR, in opposition to the stator field, resulting in the
torque production and rotor turning at a given speed.
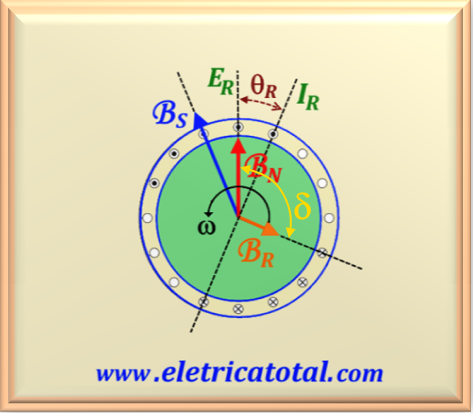
Figure 107-03
In Figure 107-03 we see a diagram showing the rotating field of the stator, BS.
If you are interested in knowing how this rotating field is produced by the three phases of the electrical network, you can access:
Production of a Rotating Magnetic FieldClick Here!
This field induces a voltage in the rotor bars, which in turn produces a current flow in the rotor, which is delayed by
with respect to the voltage of an angle θR, due to rotor inductance. And this chain, IR,
produces a rotating magnetic induction field BR that lags 90° with respect to the current. Those
two produced fields interact with each other resulting in a resulting field, BN, which will be responsible
for the appearance of a counterclockwise torque, causing the machine to accelerate in the direction of the torque.
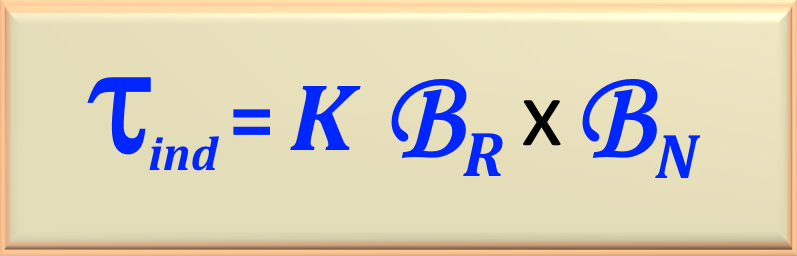
In this way, we can establish the equation of the induced torque in the machine through eq. 107-01, or:
eq. 107-01
Where the variables involved are:
τind - Conjugate or torque induced in the machine;
K - Constructive machine constant;
BR - Magnetic induction field of the rotor;
BN - Resultant net magnetic induction field.
It is possible to write this equation in its scalar form through eq. 107-1a.
eq. 107-1a
When the motor is operating at no load, the magnetic field of the rotor is very small, the induced torque is also very small.
is very small, just big enough to overcome rotational losses
from the engine. In this case, since the stator is what provides most of the resulting net magnetic field,
BN, so the stator current I1 is quite high, even at no load , as it must provide the
most of BN. This is the reason why induction motors have large currents to
empty compared to other types of machines. The no-load current of a motor
induction current is usually 30 to 60% of full load current.
On the other hand, from Figure 107-03 we see that δ = θR + 90°. So, taking that into
consideration is possible to write sin δ = sin (θR + 90°) = cos θR. This term is the rotor power factor.
Observation
"At this point, it's important to realize that the induction engine can never reach synchronous speed.
If that happened, the rotor bars would be stationary with respect to the stator field, BS. In that
otherwise there would be no voltage induced in the bars. Consequently, the motor would lose speed due to friction and other energy losses machine until it stops.
With this, we conclude that an induction motor must always rotate at a speed lower than the synchronous speed."
So we can say that when an induction motor is running normally, both the rotor field
BR, as the stator field BS , rotate together at synchronous speed, but the
rotor rotates at a lower speed.
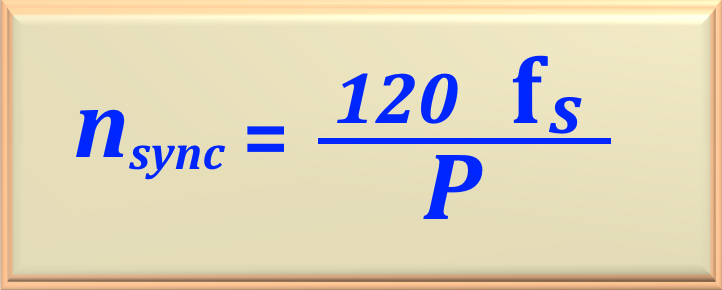
We must make it clear that the synchronous speed established by the magnetic induction field BS,
depends on the number of poles in the machine. Thus, the synchronous speed of the machine can be calculated by eq. 107-02.
eq. 107-02
Where the variables involved are:
nsync - synchronous speed of magnetic induction field BS;
fS - frequency in Hz of the machine's power supply system;
P - number of machine poles.
Based on this equation, we can create a table showing the relationship between the number of poles in a machine and its speed
rotation for the two main frequencies in three-phase networks.
The voltage induced in the rotor bars of an induction motor depends on the speed
of the rotor in relation to the magnetic fields. Thus, two terms are commonly used to define the movement
relative to the rotor and magnetic fields. One of them is the slip speed, nesc, defined as the
difference between the synchronous speed, nsync and the rotor speed, nr, or:
eq. 107-03
The other term used to describe relative motion is slip, usually represented by s,
which is the relative speed expressed on a per unit or percentage basis. That is,
the slip is defined as
eq. 107-04
Note that from eq. 107-03 we can isolate nr as a function of slip and synchronous speed,
getting:
eq. 107-05
It should be noted that we can obtain the same results when we replace the letter n in the equations above with
Greek letter ω, where ω corresponds to the angular velocity given in rad/s.
Note that if the rotor is rotating at synchronous speed, then s = 0, at step
that, if the rotor is stationary, then s = 1. Therefore, the normal speeds of a
engine are between these two limits.
In an induction motor, when voltage is applied to the stator windings,
a voltage is induced in the rotor windings of the machine. In general, how much
The greater the relative motion between the rotor and stator magnetic fields, the greater the rotor voltage and frequency. O
maximum relative motion occurs
when the rotor is stopped. This condition is called locked rotor or locked,
so that the highest rotor voltage and highest frequency are induced with the rotor
in this condition. The lowest voltage (0 V) and lowest frequency (0 Hz) occur when
the rotor is moving with the same speed as the magnetic field of the stator,
resulting in zero relative motion. The value and frequency of the voltage induced in the
rotor for any speed between these extremes is directly proportional to the
rotor slippage. Denominating the voltage induced in the rotor, when it is blocked, for
EA0, we can determine the induced voltage in the rotor for any slip given by
eq. 107-06.
eq. 107-06
Following the same line of reasoning, we can say that the frequency of the voltage induced in the rotor for any
slip will be given by eq. 107-07.
eq. 107-07
Evidently the rotor has a certain value of resistance and reactance. Calling the rotor resistance
RR, we can consider that it has a constant value and is independent of slip. In turn, the
rotor reactance depends more complexly on slip.
Considering the inductance of the rotor, represented by LR, we know that the reactance depends on this inductance and the rotor frequency. Then, we can write the eq. 107-08, where we represent the rotor reactance as XR.
eq. 107-08
Considering the eq. 107-07, we have:
eq. 107-09
We know that when the rotor is blocked we have s = 1. Thus, we can define the blocked rotor reactance by
XR0 is given by eq. 107-10.
eq. 107-10
Therefore, joining eq. 107-09 and the eq. 107-10, let's get the eq. 107-11 which explains the value of
XR as a function of XR0 and s, that is:
eq. 107-11
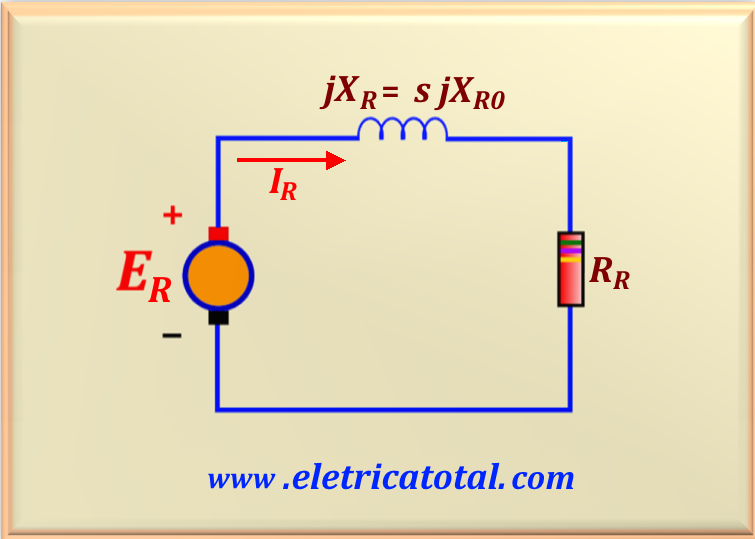
After presenting these definitions, we can present the electrical model of the rotor circuit as
shows Figure 107-04.
Figure 107-04
Based on the electrical model we can determine the current IR flowing in the rotor. Then:
eq. 107-12
Knowing that ER = s ER0, we can do an algebraic arrangement in eq. 107-12 and write:
eq. 107-13
It should be noted that the two equations above seem to be the same but are not. While the first one (eq. 107-12) is
referred to the frequency of the voltage induced in the rotor (fr), the second is referred to the stator frequency
(fs). That is, the eq. 107-13 shows what happens to the rotor when it is "viewed" from the stator side.
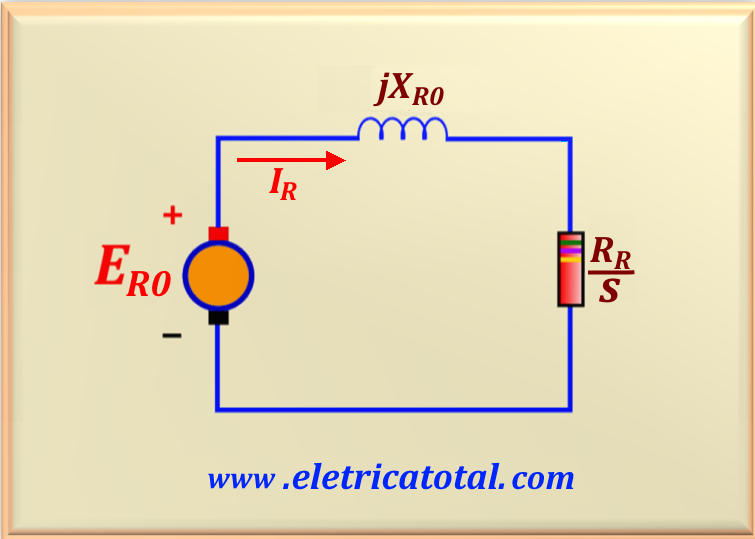
And from this equation we can remake the electrical model of the rotor as shown in Figure 107-05.
Figure 107-05
Note that when the slip is very low, i.e. the rotor turns close to synchronous speed, the resistive term is very low.
greater than the rotor reactance, with a predominance of rotor resistance, and with that, the current varies linearly
with the slip. And when the slip is high, that is, the machine turns slowly (or is stopped), XR0
is much larger than RR / s and the rotor current approaches a steady-duty value at this situation.
To obtain the final equivalent circuit per phase of an induction motor it is necessary
that the rotor part in the model is referred to the stator side. The circuit model of
rotor that will be referred to the stator side is the model shown in Figure 107-05, which
has all the effects of velocity variation concentrated in the impedance term.
When we studied transformers in Chapter 91, we saw that it was possible to refer to voltages, currents and impedances
from secondary to primary through equations eq. 91-02 and eq. 91-03. This same type of transformation can be applied in the case of the rotor of an induction motor. Defining the effective transformation ratio as aef, then the rotor voltage can be expressed as:
eq. 107-14
In the same way we can write the rotor current as
eq. 107-15
And the rotor impedance can be defined as
eq. 107-16
And now let's adopt the following definitions:
eq. 107-17
eq. 107-18
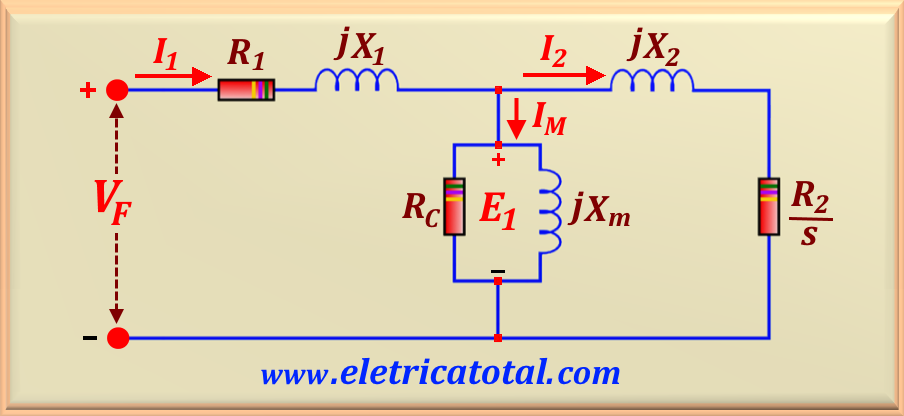
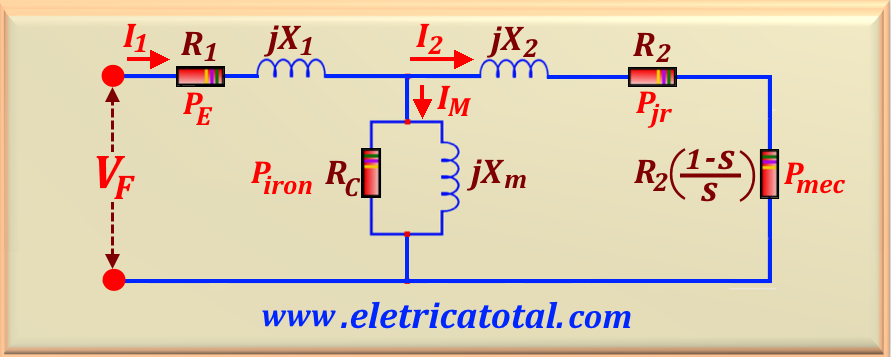
Adopting these definitions above, we are able to show the final electrical model of the induction motor as seen in Figure 107-06.
Figure 107-06
In practice it is very difficult to know or measure these parameters of the squirrel cage induction motor. However,
there are practical methods to measure rotor resistance, R2, and reactance, X2.
We will introduce these methods later.
An induction motor can basically be described as a rotary transformer. In an ordinary induction motor, the windings of the
secondary (rotor) are short-circuited, so there is no electrical output. Instead, the output is mechanical.
When we declare the nominal power of a motor in HP or in kW, it means that this power is the power
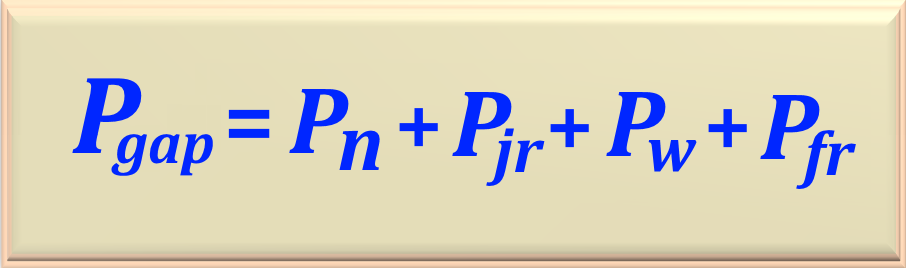
available on the motor shaft, Pn. The power that the rotor must develop is the nominal power,
Pn, plus the losses associated with the shaft, such as the fan losses (since it is coupled to the shaft) and the losses by friction on the bearings that hold the rotor in place. In addition, we must add the copper losses of the rotor, which we will call Pjr (joule losses in the rotor). So we can represent the power that the
rotor must develop by Pgap. The reason for this name will be explained later. That way,
we can write:
eq. 107-19
where the variables involved are:
Pn ⇒ is the nominal power of the motor;
Pw ⇒ is the power related to fan losses or ventilation;
Pfr ⇒ is the power due to friction losses;
Pjr ⇒ is the joule losses in rotor copper.
It should be noted that many authors tend to gather in a single variable the sum of the fan losses and the friction losses
and call it rotational losses, represented by Prot. In this case we have
Prot = Pw + Pfr.
The core losses of an induction motor come partly from the stator circuit and partly from the rotor circuit.
Since an induction motor normally operates at a speed
close to synchronous speed, the relative motion of magnetic fields about
the rotor surface is very slow and the losses in the rotor core are very small
compared to the stator.
The higher the speed of an induction motor, the greater the losses.
by friction and ventilation. On the other hand, the higher the speed
rotor (up to nsync), the smaller your core losses will be. Therefore, these three categories of losses are
sometimes combined and called rotational losses. To the
Total rotational losses of an engine are often assumed to be constant.
with variable speed, because the various losses vary in opposite directions with the
speed change.
After analyzing the rotor and the power it must receive to achieve the nominal power on the motor shaft,
let's analyze the stator circuit. We start with the joule losses in the stator winding which, according to the model
from Figure 107-06, is given by PE = 3 R1 . I12, where PE
are the losses in the three phases of the stator. In addition, we can add the losses by hysteresis and eddy currents
in the stator core, which we will call Piron. Thus, the input power of the machine overcomes these losses,
more the required power that must be transferred to the rotor through the air gap between the rotor and the stator.
This power is called the air-gap power, which we previously represented by Pgap. Therefore,
if we want to calculate the nominal power of the motor, that is, the power on the motor shaft, we can rewrite eq. 107-
19 as follows:
eq. 107-20
Taking into account what was exposed above, we can find the power consumed by the motor in relation to the mains.
food.
eq. 107-21
We must remember that, electrically, the power consumed by the motor, taking into account the power factor (PF = cos
φ), is given by eq. 107-23.
eq. 107-22
where the variables involved are:
Pin ⇒ motor input power in watts;
VL ⇒ mains line voltage in volts;
IL ⇒ line current (IL = I1 as per Figure 107-06) in
A;
φ ⇒ lag angle between VL and IL.
To complete this item, let's calculate the efficiency of the motor, given by eq. 107-23.
In this item we will calculate the power and torque developed by the induction motor. Initially, based on the circuit of
Figure 107-06 and looking closely at the circuit, it is possible to see that the only element that can consume the power
developed in the air gap is the resistor represented by R2 / s. So, we can express the power in
air gap by eq. 107-24.
eq. 107-24
The core losses of the rotor can be expressed by eq. 107-25.
eq. 107-25
The rotor copper losses can be expressed by eq. 107-26.
eq. 107-26
Note that replacing eq. 107-26 in eq. 107-24 we easily conclude that:
eq. 107-27
After the losses in stator copper, core and rotor copper are
subtracted from the motor input power, the remaining power is converted in the form
electrical to mechanical. This converted power, sometimes called the mechanical power developed, is given by
eq. 107-28
If, in the equation above, we replace the variables by their respective values, according to equations eq. 107-24
and eq. 107-26, we can write the eq. 107-28 after some algebraic work, or
eq. 107-29
Therefore, the smaller the motor slip, the smaller the losses in the machine rotor. Also note that,
if the rotor is not turning, the slip
will be s = 1 and the air-gap power will be consumed entirely in the rotor.
Note also that, associating the equations eq. 107-27 and eq. 107-28, we can write another
relationship between the powers in the air gap and the mechanical power, that is:
eq. 107-30
And finally, if we know the ventilation and friction losses we can calculate the output or nominal power of the
engine through eq. 107-31.
eq. 107-31
To conclude this item, let's calculate the torque that the engine develops. We know that the torque is given by
ratio of power to angular velocity. So let's express this quantity as a function of the power developed in the
air gap and the synchronous angular velocity given by eq. 107-32.
eq. 107-32
The torque given by eq. 107-32 is the torque induced in the rotor of the motor. It's not the torque on the motor shaft. This torque,
known as nominal torque or output, acts directly on the load. That's why we'll call it
τload, indicating that it acts on the load. And it is given by eq. 107-33.
Part of the power flowing in the air gap of an induction motor is consumed as
losses in the rotor copper, represented by the fraction s, while the other part is converted into mechanical power
to drive the motor shaft, represented by the fraction 1 - s. Thus, it is evident that from this statement we see that a
induction operating at high slip is an extremely inefficient motor. So it is possible to separate
these two parts of the air-gap power and
express them separately in the motor equivalent circuit.
The eq. 107-24 gives an expression of the total power of air gap for
an induction motor, whereas the eq. 107-26 gives the actual losses on the rotor of the
motor. The air-gap power is the power that would be consumed in a resistor of
value R2 / s, while the rotor copper losses are expressed by the power that
would be consumed in a resistor of value R2. The difference between them is Pmec
and it would be the power consumed in a resistor of value according to eq. 107-33.
eq. 107-34
The Figure 107-07 shows the equivalent circuit per phase where it can be seen, in the form
of different circuit elements, the rotor copper losses and the converted power
to mechanical form.
We know that the air-gap power is the power that crosses the air gap between
the stator circuit and the rotor circuit. It is equal to the power absorbed in the resistance R2 / s.
A possible way to find this power is to calculate the rotor current, I2, since
we study the eq. 107-24 which gives us the total power in the air gap. For didactic reasons we will repeat it below.
eq. 107-24
So, if there is a way to determine I2, then the air-gap power and induced torque
will be known. One of the simplest ways to determine this current is using the Thévenin equivalent of
circuit that is to the left of the rotor circuit. Recalling that Thévenin's theorem states that any circuit
linear that can be separated by two terminals
from the rest of the system, can be replaced by a single voltage source in series with a
equivalent impedance. If this were done with the equivalent circuit of the
induction, the resulting circuit would be a simple combination of elements in series.
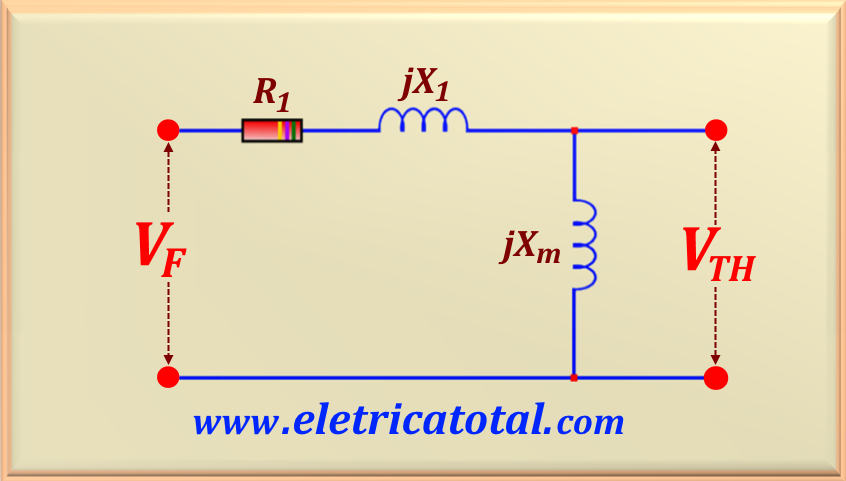
To calculate the Thévenin equivalent of the input side of the induction motor, we must first eliminate the circuit of the
rotor, as shown in Figure 107-08.
Figure 107-08
To calculate the Thévenin voltage we can use a voltage divider. Calling Zx the sum of
all the components, we have:
eq. 107-35
Applying the voltage divider, we get:
eq. 107-36
If we are interested in calculating the Thévenin voltage modulus, then we must define the impedance modulus
Zx, which we will represent as Zx2, according to the equation < x>eq. 107-37.
eq. 107-37
In this way, the module of the Thévenin voltage is given by eq. 107-38.
eq. 107-38
However, taking into account that ( X1 + Xm )2 >> R12 , we can
rewrite the eq. 107-38 achieving a great approximation through eq. 107-39.
eq. 107-39
We can define the fraction that appears in eq. 107-39 as Kth = Xm / X1 +
Xm. So, we can write:
eq. 107-40
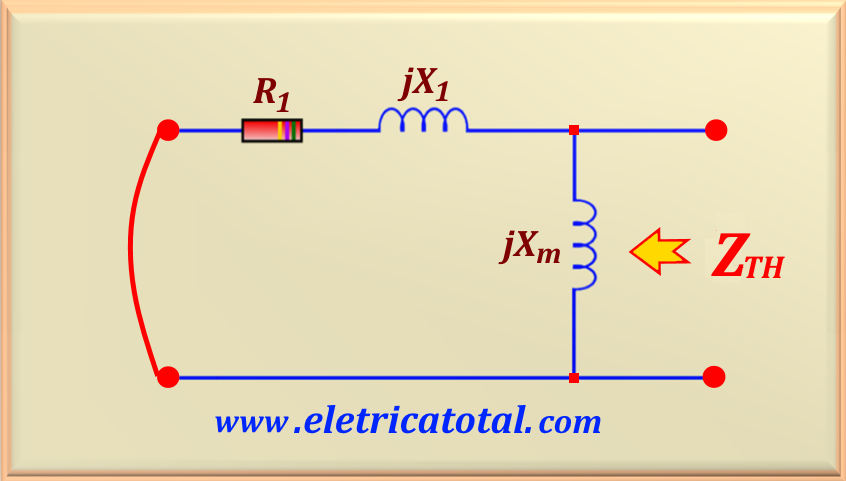
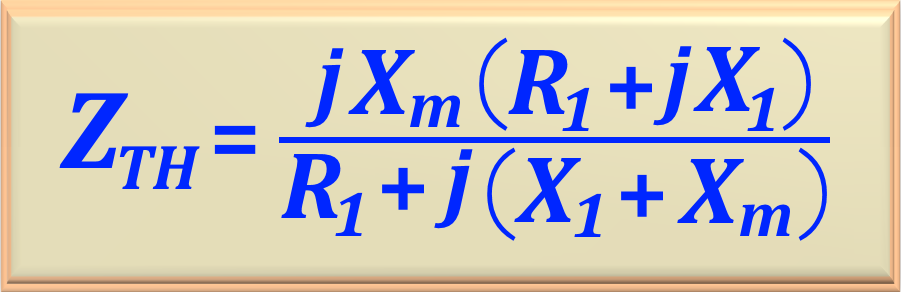
To calculate the Thévenin impedance let's define it as ZTH = RTH + j XTH. O
circuit used for the calculation is shown in Figure 107-09, where the voltage source VF was shorted
circuited to be able to apply Thévenin's theorem.
Figura 107-09
So, to find the value of ZTH we must find the parallel of the impedances shown in the circuit.
So, applying the basic rule of two impedances in parallel, we have:
eq. 107-41
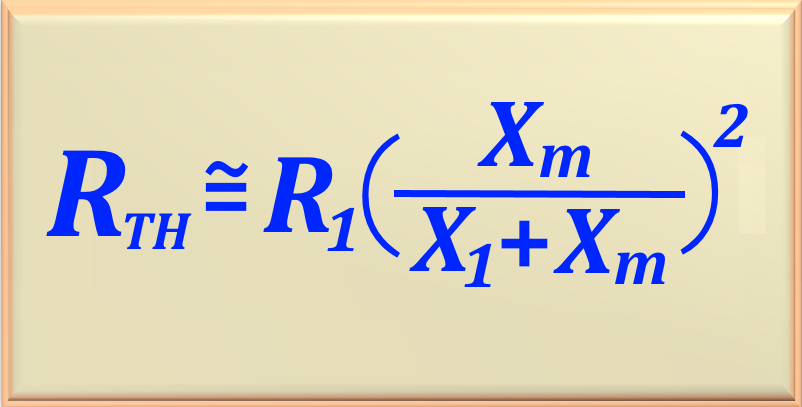
Again, considering that ( X1 + Xm )2 >> R1 2 we can
approximate the eq. 107-41 by eq. 107-42, that is:
eq. 107-42
As we previously defined the variable Kth, then we can write the eq. 107-42 like:
eq. 107-43
And, considering that ( X1 + Xm )2 >> R1 2 we can write
the equation
which approximates the value of XTH.
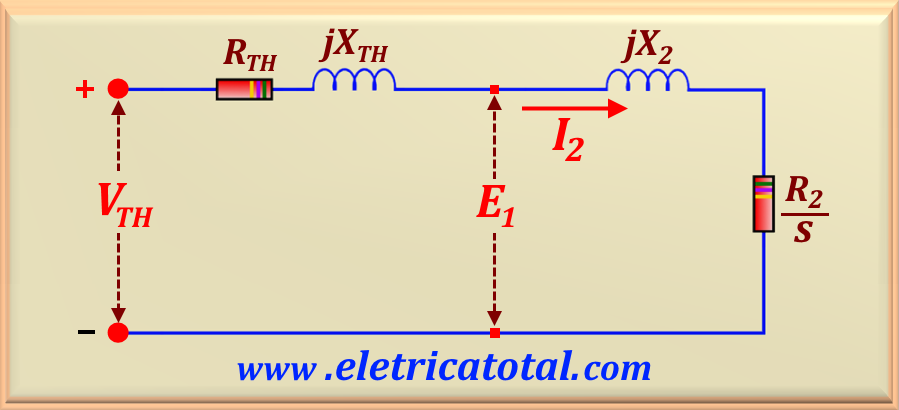
With the calculation of the Thévenin equivalent in the previous item, we can show the equivalent circuit of the
induction motor as shown in Figure 107-10.
Figure 107-10
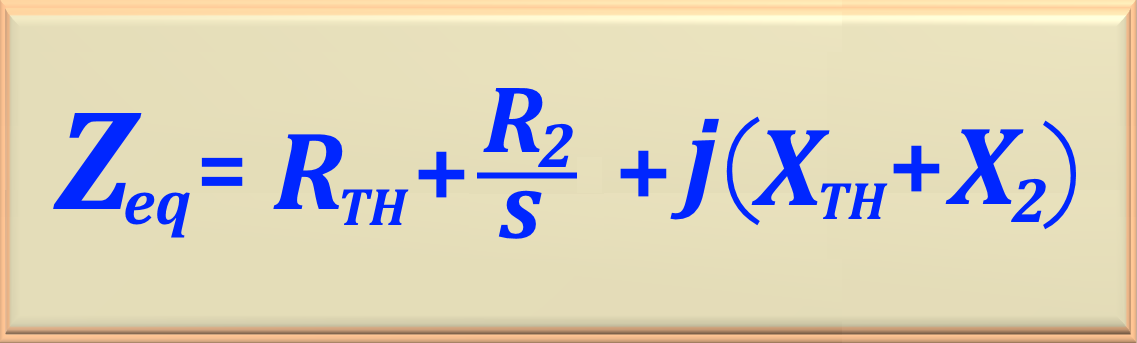
With the equivalent circuit model we can easily calculate the value of I2. For this we will find the
equivalent impedance of the entire circuit.
eq. 107-45
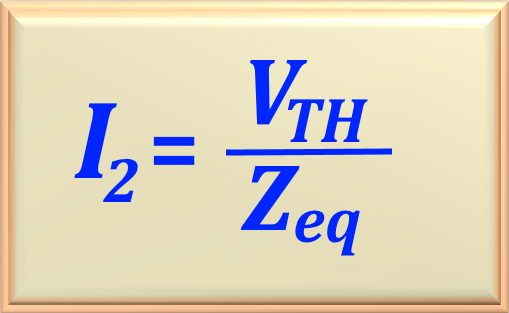
Therefore, to calculate the value of I2 just apply Ohm's law, or:
eq. 107-46
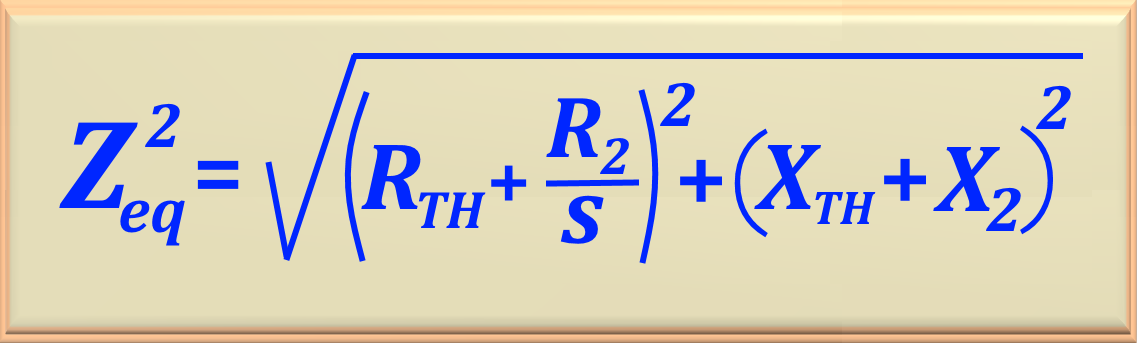
And to find the module of the current I2 let's define the variable Z22
through the eq. 107-47.
eq. 107-47
This way we can find the module of the current I2 using eq. 107-48.
eq. 107-48
Let's recall that the power in the air gap of the motor is given by eq. 107-24, repeated below.
eq. 107-24
To calculate this power, let's define the variable Z'eq given by eq. 107-49 below.
eq. 107-49
Substituting in eq. 107-24 the value of I2 given by eq. 107-48, let's find the power of
air gap as a function of the values of the Thévenin equivalent. Soon:
eq. 107-50
Let's remember that the induced torque of the motor is given by eq. 107-32, repeated below.
eq. 107-32
Substituting in eq. 107-32 the value of Pgap given by eq. 107-50, let's find the induced torque
of the engine according to the values of the Thévenin equivalent. Like this:
eq. 107-51
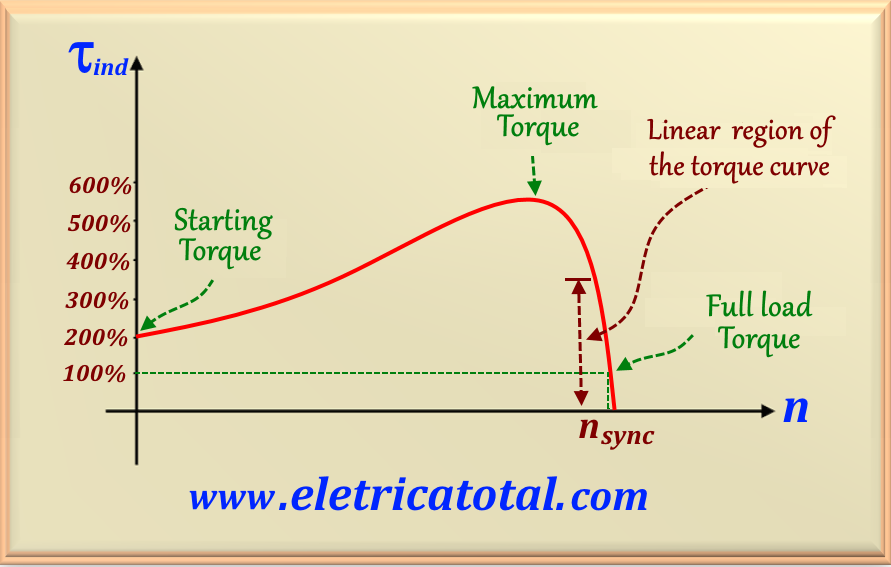
Figure 107-11 shows a graph of the torque of an induction motor at
function of velocity (and slip).
Figure 107-11
From the graph shown in Figure 107-11 we can derive the following information:
1. - Motor induced torque is zero at synchronous speed;
2. - The curve of torque versus speed is approximately linear between load
empty and full load. In this range, the rotor resistance is much greater than
its reactance. In this way, the rotor current, the rotor magnetic field, and the
induced torque increases linearly with increasing slip;
3 - There is a maximum possible torque that cannot be exceeded. This conjugate,
called maximum torque, is 2 to 3 times the nominal full torque
engine load;
4 - The starting torque of the motor is slightly higher than its starting torque.
full load, so this motor will drive any load
that he can drive at full power;
5 - Note that the motor torque for a given slip varies with the
square of the applied voltage. This fact is useful in one of the ways of controlling
speed of induction motors.
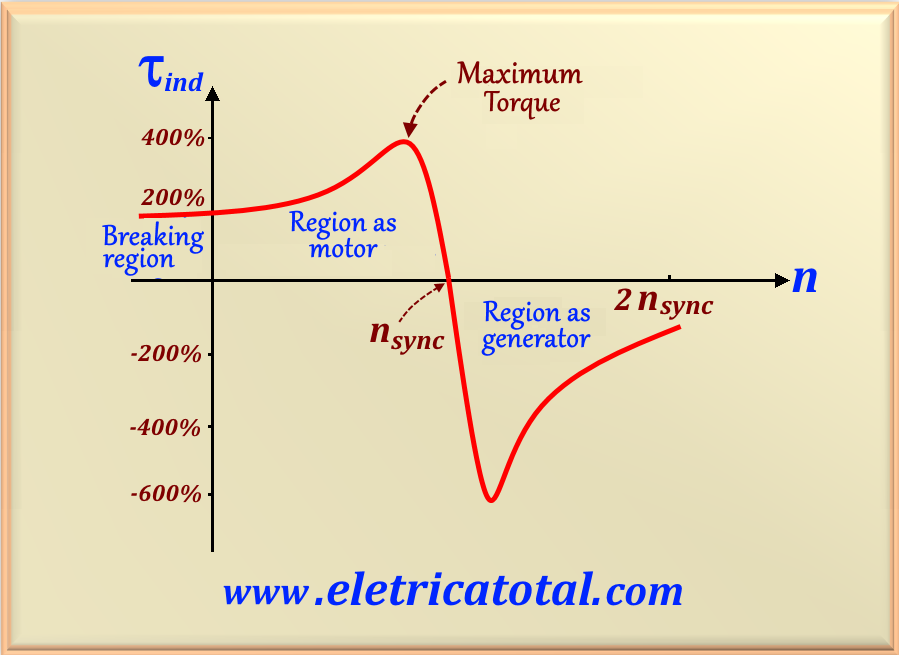
Figure 107-12 shows a characteristic curve of torque versus speed of an induction motor,
showing the extended operating ranges, where you can see the braking region and the generator region.
Figure 107-12
Observing the graph shown in Figure 107-12 we can draw the following conclusions:
1. - If the induction motor rotor is driven faster than synchronous speed, then the direction
of the induced torque it is inverted and the machine becomes a generator, converting mechanical power into electrical power;
2. - If the motor is rotating backwards with respect to the direction of the magnetic fields, then the induced torque on the machine will brake the machine very quickly
and will try to make it rotate in the opposite direction. As the reversal of meaning
of rotation of the magnetic field is simply a matter of switching
two phases of the stator, this fact can be used to brake an induction motor very quickly. The act of exchanging two
phases by switching, to brake the motor very quickly, it is called phase inversion braking.
As the induced conjugate is given by eq. 107-32, the maximum possible torque occurs when the air-gap power is
maximum. Since the air gap power is equal to the
power consumed in resistor R2 /s, the maximum induced torque will occur when
the power consumed by this resistor is maximum.
In a situation where the load impedance angle is fixed, the maximum power transfer theorem states that
that maximum power transfer to the load resistor R2 /s will occur when
the impedance value is equal to the source impedance value. The module of the source impedance, Zf, is given by
eq. 107-52.
eq. 107-52
Therefore, the maximum power transfer occurs when R2 /s = Zf. Of this relationship
we can find the maximum conjugate slip, smax, by doing an algebraic manipulation on
relation shown in this paragraph and arriving at eq. 107-53.
eq. 107-53
Note that the referenced rotor resistance R2 only appears in the numerator. Like this,
rotor slip at maximum torque is directly proportional to rotor resistance.
The maximum conjugate value can be found by entering the expression for
the maximum torque slip in the torque equation according to eq. 107-51.
So, the resulting maximum torque equation is:
eq. 107-54
This torque is proportional to the square of the supply voltage and relates to
also with the inverse of stator and rotor impedances. The smaller they are
the reactances of a machine, the greater the maximum torque it is capable of
to reach. Note that the slip for which the maximum torque occurs is
directly proportional to the rotor resistance, R2, but the value of the maximum torque is independent of the value of this resistance according to eq. 107-54.
In many cases, starting induction motors can be
done by simply connecting them directly to the power line. This is only possible if the engine is low power, at most 10HP. However, some
there are sometimes reasons not to do so. For example, the starting current can
cause such a temporary voltage drop in the power system that it makes unacceptable the
departure with direct connection to the line. This is the case for high power motors, above 10 HP.
In the case of wound-wound induction motors, starting can be
made with relatively low currents by inserting extra resistances in the circuit of the
rotor during starting. These resistors not only increase the starting torque,
as well as reduce the inrush current.
In the case of squirrel cage induction motors, the starting current can
vary widely depending fundamentally on the nominal power of the motor and the
effective rotor resistance under starting conditions. To estimate the rotor current
under starting conditions, all squirrel cage motors now have a letter code
starting (not to be confused with your design class letter) on your nameplates
identification. The code letter specifies limits to the amount of current the
engine can consume on starting.
These limits are expressed in terms of the apparent starting power of the engine.
according to its rated power (HP) specification. Table 107-01 is a table that contains the
kilovolt-amps per HP for each code letter.
Table 107-01
Starting Code Letter
Locked Rotor, kVA/HP
A
0 a 3.15
B
3.15 a 3.55
C
3.55 a 4.00
D
4.00 a 4.50
E
4.50 a 5.00
F
5.00 a 5.60
G
5.60 a 6.30
H
6.30 a 7.10
J
7.10 a 8.00
K
8.00 a 9.00
L
9.00 a 10.00
M
10.00 a 11.20
N
11.20 a 12.50
P
12.50 a 14.00
R
14.00 a 16.00
S
16.00 a 18.00
T
18.00 a 20.00
U
20.00 a 22.40
V
22.40 e acima
How to Use the Table
Let's consider the following example. Let be a 20 HP three-phase induction motor operating at 220 V and
starting with the letter F.
According to Table 107-01, the maximum kilovolt-amps per HP is 5.6. So the maximum kilovolt-ampere
starting of this engine is:
Sstart = 15 (HP) x 5,6 = 84 kVA
Then, the starting current of the motor will be:
IL = Sstart / √3 VT = 84 kVA / √3 x 220 V
Performing the calculate, we find:
IL = 220 A
When the starting current is too high, there is a need to reduce it by adopting a suitable starting circuit. However, we must
consider that when we reduce the starting current the starting torque of the motor will also be reduced.
Let's study some alternatives to solve this problem.
It is normal for manufacturers to supply their higher power motors with six terminals, where each two terminals represent the
single phase winding. In this case, it is possible to connect the motor in a Delta or Star connection. So one way to
to reduce the starting current of an induction motor, connect it in the Star configuration when starting. after the
motor reaches a speed close to the working speed, change the connection to a Delta configuration. This procedure is
feasible, because in the Star connection, the voltage on the motor phase winding is equal to the line voltage divided by the factor √3. In this way, with a lower voltage at its terminals, the starting current is reduced by the
factor √3.
In general, we can state that the starting torque varies with the square of the applied voltage per phase.
Thus, in a star connection, the phase voltage is 1 / √3 the line voltage. Then the torque is reduced by
3 times relative to the delta connection.
Thus, a lower current will produce a lower starting torque. When it is possible to start the motor with a current
starting current of approximately 58% of the rated starting current, this method, which is fairly inexpensive, is
often employed.
Switching from the Star connection to the Delta connection should be done as quickly as possible to eliminate
large transient currents due to momentary loss of power. For this reason, spring-loaded keys will be preferred.
coupled, double position, to the detriment of simple knife-type keys.
In this case, it is possible to use autotransformers to reduce the motor supply voltage. When the motor reaches a speed close
to the operating speed, the autotransformer is removed from the circuit and the motor is fed directly from the mains.
We must understand that when we reduce the supply voltage, the current also decreases in the same proportion. However, the
starting torque (torque) decreases with the square of the applied voltage. Thus, when applying this technique, it is
important to verify that the starting current produces the necessary torque to start the load coupled to the motor shaft.
The development of the double-cage rotor created such versatility with respect to induction motor design that
led to a variety of torque-slip characteristics. Adjusting conveniently the cage winding
dual rotor, manufacturers have developed numerous variants of the single or normal cast rotor design. To distinguish between the various types available, the Associação Brasileira de Normas Técnicas (ABNT), based on studies by the National Electrical
Manufacturer's Association (NEMA), adopted an alphabetical code system, in which each type of rotor induction motor in
cage falls into a certain category designated by a letter.
Basically there are four types of induction motor. We have classes A, B, C and D. Let's go
describe them separately.
The class A motor is a normal cage type induction motor built for normal speed use. The reactance
X2 of the equivalent circuit of an induction motor represents the form
referred to the stator from the rotor leakage reactance. In general, the farther the bar is from the stator
of the rotor, or a part of it, the greater the leakage reactance, because a smaller percentage of the bus flux will reach the stator.
Therefore, if the bars of a rotor of
squirrel cage are placed close to the surface of the rotor, they will only have
a small leakage flux and the reactance X2 will be small in your equivalent circuit. On the other hand, if the
bars are placed deeper into the surface
of the rotor, there will be more leakage and the reactance of the rotor X2 will be greater.
By making the rotor bars to a large size and positioned close to the surface of the rotor, this constructive form will present
a low resistance (due to its large cross section) and a leakage reactance (X2)
low (due to the location of the bar close to the stator). As the rotor resistance
is low, the maximum torque will be very close to synchronous speed (see eq. 107-53) and the motor will be very efficient.
Due to the good efficiency of this motor, very little air-gap power will be lost in rotor resistance.
However, as R2 is small, the starting torque of the motor is situated between 1.5 to 2 times the
rated torque at full load. And the
starting current will be high, ranging from 5 to 7 times the rated current, making it less desirable for
direct starting, mainly for motors with power greater than 5 HP.
This type of constructive form is called class A
by the National Electrical Manufacturers Association (NEMA). It is approximately a typical induction motor, with the
its characteristics basically the same as a wound-rotor motor without the addition of extra resistance.
Its torque versus speed characteristic is shown in Figure 107-13.
Class B motors have a starting torque just below normal, low slip and a current of
minor match. This class has a winding more deeply embedded in the rotor grooves, thereby causing an increase in
in the motor starting reactance. The increase in starting reactance reduces the starting torque somewhat, but also reduces the
inrush current. Currently, B class engines are replacing A class engines.
Class C motors have a high starting torque, low starting current and low slip (less than
5%) at full load. The maximum torque is slightly lower than that of class A motors, while
that the starting torque is up to 250% the full load torque. these engines are
built with double squirrel cage rotors, so they are more expensive
than engines in previous classes. They are used for loads with high
starting torques such as pumps, compressors and conveyors, all
initially already loaded. However, when used with high inertia loads they have limited thermal dissipation.
Class D motors have a very high starting torque.
high (275% or more of the rated torque) and a low inrush current. They
also have high slip at full load. They are basically engines
common class A induction coils, whose rotor bars are smaller and made of a higher resistivity material. The high
rotor resistance shifts the peak torque
down to a very low speed. This is why these motors are known as high resistance rotor motors.
The full load slip of these
motors is very high, due to the high rotor resistance; typically, it is 7 to
11%, but can go up to 17% or more. These motors are used in applications
which require the acceleration of loads with extremely high inertia, especially
the large flywheels used in punching, stamping or cutting presses.