The biggest problem in the design of single-phase induction motors is that, unlike
three-phase power sources, a single-phase source does not produce a magnetic field
rotating. Instead, the magnetic field produced by a single-phase source remains stationary in the direction
and pulses with time. Since there is no magnetic field
rotating in the stator, a single-phase induction motor has no starting torque. Thus, conventional induction motors cannot work
and the need for special projects arises.
This can be easily seen by examining the engine when its rotor is
stopped. The machine's stator flux first increases and then decreases, but always
in the same direction. As the stator magnetic field does not rotate, there is no movement
relative between the stator field and the rotor bars. Therefore, no tension is
induced resulting from the relative movement of the rotor, no current circulates and consequently no
conjugate is induced. In reality, a voltage is induced in the
rotor bars by transformer action (dφ/dt) and, as the bars are short-circuited,
there is a current flowing in the rotor. However, as this magnetic field is aligned with the
stator magnetic field, no net torque is
produced in the rotor. So, when it is stopped, the motor resembles a transformer with a single winding
secondary in short circuit.
The history of the induction motor is marked by significant challenges and innovations.
At the end of the 19th century, the absence of a starting torque in single-phase induction motors
represented a considerable obstacle, limiting its functionality and applicability.
With single-phase AC power systems operating at 133 Hz at that time, materials and techniques
available did not allow the construction of an efficient engine. It was only with the advent of systems
three-phase power units, operating at a lower frequency of 25 Hz, than induction motors
began to become viable and widely adopted from the mid-1890s. One of the pioneers in the development
of these engines was Nikola Tesla, and his innovations led to significant improvements in robustness, reliability and efficiency,
transforming induction motors into fundamental elements for modern industry. At the moment,
induction motors are essential in several sectors, responsible for a substantial portion
of energy consumption in industries and presenting a huge installed base around the world.
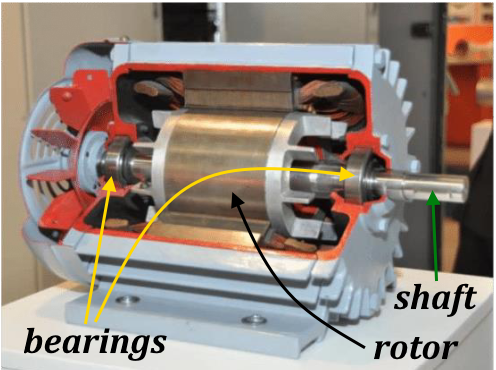
In Figure 108-01 we can see the components of a single-phase induction motor.
Figure 108-01
There are two basic theories that explain why a conjugate is induced in the
rotor as soon as it starts to rotate. One is called the double rotating field theory
of single-phase induction motors. The other is called cross field theory
of single-phase induction motors. Let's analyze each of them separately.
The double rotating field theory is fundamental to understanding the operation of single-phase induction motors.
It explains how a pulsating magnetic field, which by itself is not capable of producing continuous rotary motion,
can be divided into two rotating fields that rotate in opposite directions. These fields interact with currents
induced in the engine rotor, generating forces that add up and result in a net torque. This torque is what
effectively turns the engine. The beauty of this theory lies in its simplicity and elegance, allowing engines to
simpler and more economical are built without the need for multiple electrical supply phases.
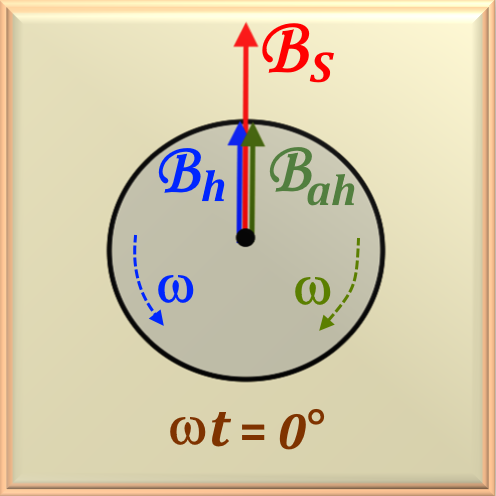
Figure 108-02
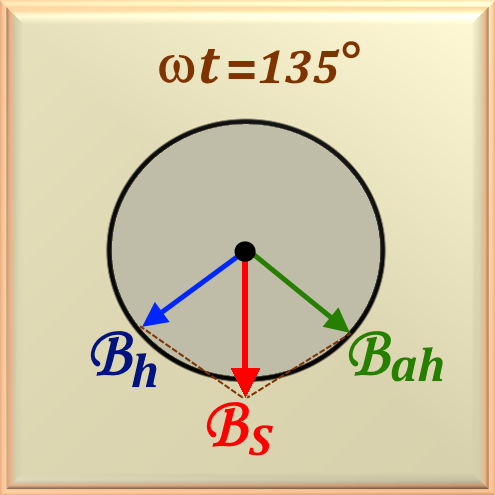
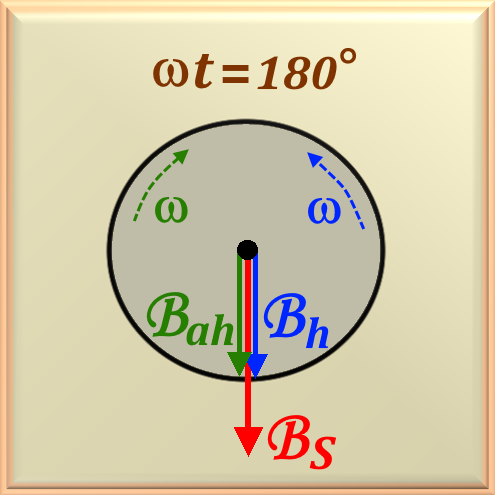
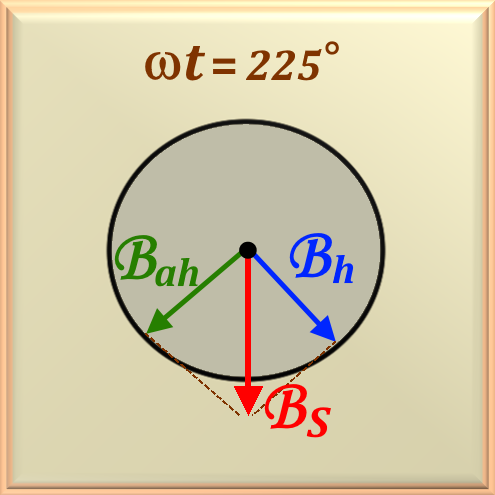
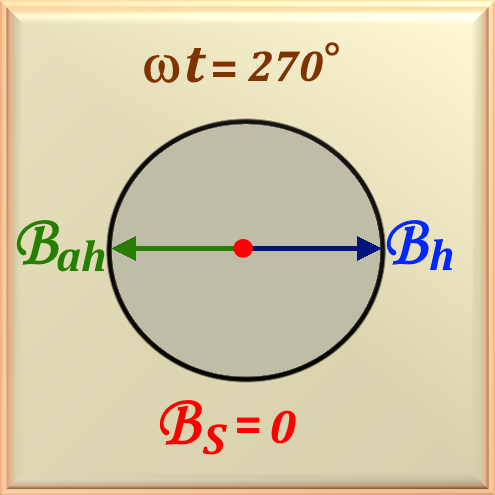
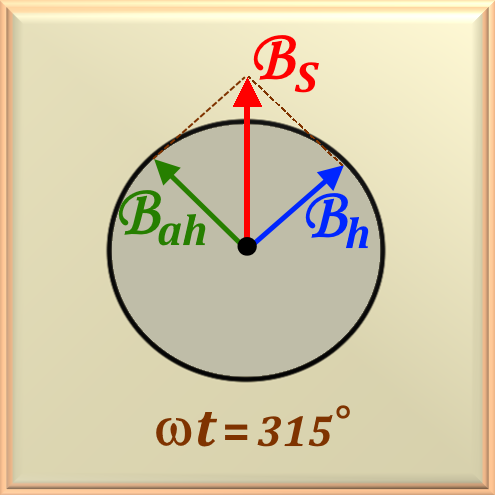
Figure 108-2 shows how a stationary pulsating magnetic field can
be decomposed into two equal and opposite rotating magnetic fields (progressive and
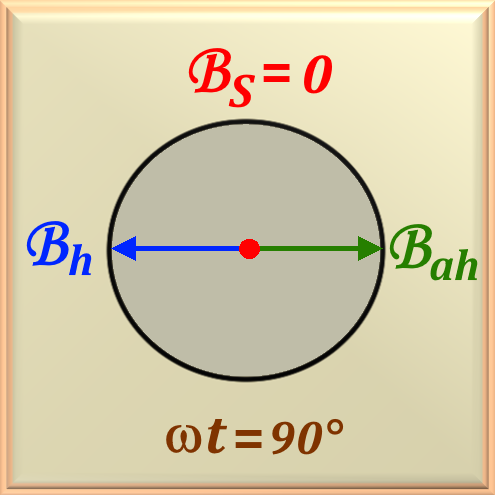
retrograde). At any moment,
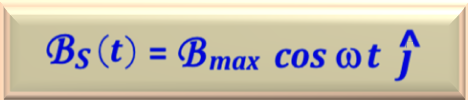
note that the vector sum of the two magnetic fields is always on a vertical line or is null. The flux density of the
stationary magnetic field is given by
In this way, the decomposition of a pulsating magnetic field into two magnetic fields of the same
module rotating in opposite directions (progressive and retrograde fields) can be represented, mathematically, as a field
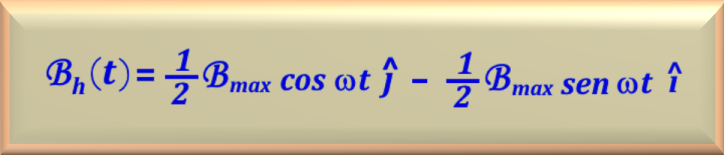
rotating clockwise and another counterclockwise. The field rotating clockwise, which we will represent by
Bh, can be expressed by
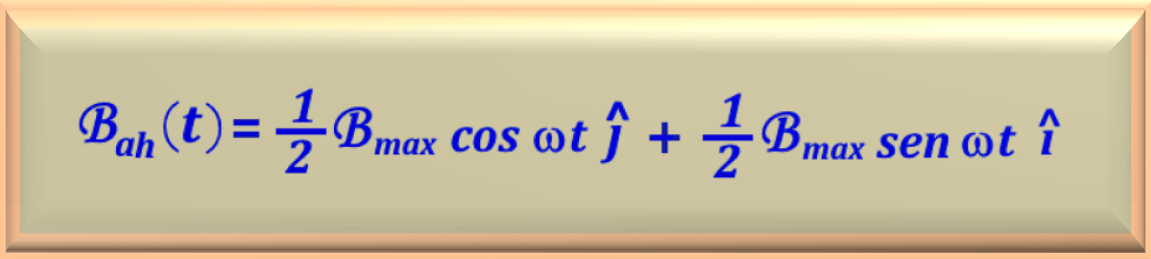
And the field rotating counterclockwise, which we will represent by Bah, is expressed by
Note that the sum of the clockwise and counterclockwise magnetic fields is
equal to the stationary pulsating magnetic field BS, that is:
Mathematical Analysis
This analysis will be done based on Figure 108-02 and remembering that the horizontal axis is
represented by the phasor î and the vertical axis by the phasor ĵ.
Analyzing for ω t = 0° and knowing that
sin 0° = 0 and cos 0° = 1, we will obtain the relations Bh = 0.5Bmax ĵ
and
Bah = 0.5 Bmax ĵ. Note that:
BS = Bh + Bah
= Bmax ĵ
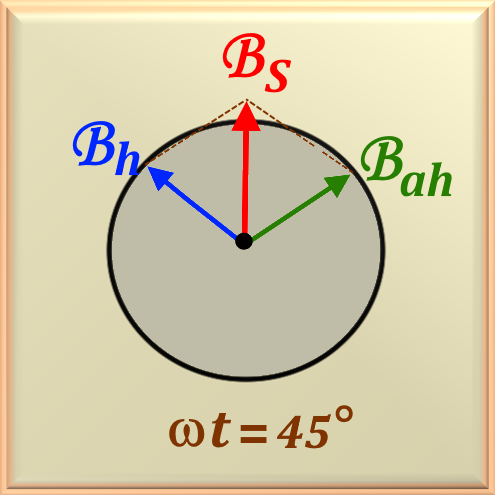
Analyzing for ω t = 45° we obtain:
Bh = (0.5)(√2/2) Bmax ĵ - (0.5) (√2/2)
Bmax î
Bah = (0.5)(√2/2) Bmax ĵ +
(0.5) (√2/2) Bmax î
So, adding the fields together we get:
BS = Bh + Bah =
√2/2 Bmax ĵ = 0.707 Bmax ĵ
Conclusion:With this analysis we verified that the resulting field, for any angle analyzed, will always be on the vertical axis
or is null, represented by the phasor ĵ, as was
stated previously.
The forward and backward magnetic fields of the motor each contribute
a component of the total stator voltage and, in a certain sense, are in series with each other. Since both magnetic fields are present,
the rotating magnetic field
progressive rotor (which has a high effective rotor resistance R2 / s) will limit the flow
of the stator current in the motor (which produces the progressive and retrograde fields).
As the current that feeds the stator's retrograde magnetic field is limited
at a low value and as the rotor's retrograde magnetic field makes a very large angle with respect to the stator's retrograde
magnetic field, the torque due
to retrograde magnetic fields will be very small when close to the
synchronous speed. We must pay attention to the fact that when we supply the motor with a single-phase voltage,
the rotor will remain stationary, that is, it will not move, as was evident in the previous considerations
the torque to which the rotor is subjected is equal to zero.
However, by any means, if we provide an initial spin to the rotor this will cause the magnetic fields to
progressive and retrograde are of different intensities causing the emergence of a torque non-zero.
This allows the engine to accelerate until it reaches its working speed.
This is mainly due to the progressive wave of
flux in the air gap increases and the back wave decreases when the rotor is placed in
movement. When the motor is running at low slip, the reflected effect of rotor resistance on
the progressive field, 0.5 R2 / s, is significantly greater than the value observed with the rotor stopped, while
that the effect on the field
retrograde, 0.5 R2 / (2 -s), is smaller.
Therefore, the impedance of the progressive field is greater than that of the stationary rotor, while that of the retrograde field is smaller.
So, the counter-electromotive force of the progressive field is greater than that of the stopped rotor, unlike the force
counter electromotive of the retrograde field, which is smaller. In other words, the progressive wave of flow increases,
while the retrograde wave of flow decreases.
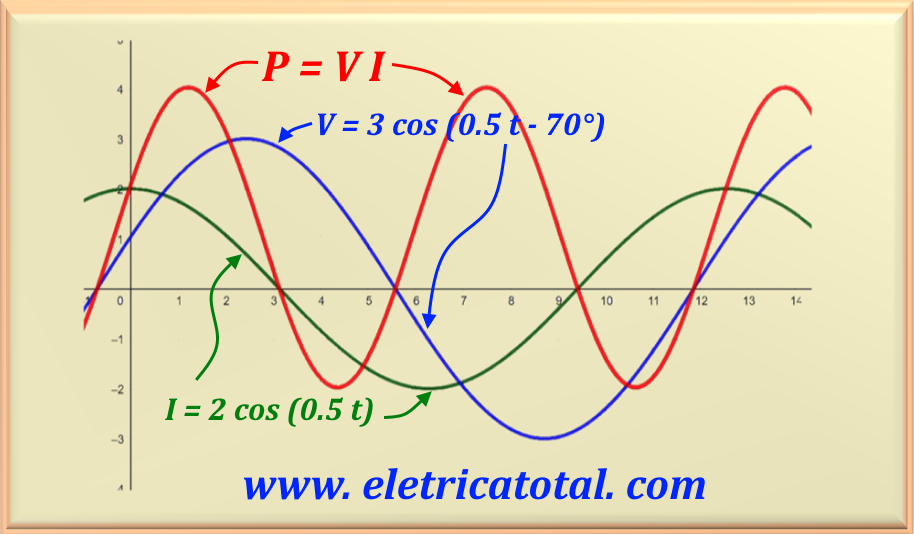
In addition to the average net conjugate, there are pulsations of
conjugate with twice the stator frequency. These torque pulsations occur when magnetic fields
progressive and retrograde intersect twice
each cycle. Thus, for a motor fed from a network whose frequency is 50 Hz, it will present a pulsation of 100 Hz. And in the case of the network
60 Hz the pulse will be 120 Hz. The Figure 108-03 shows this situation. We use power as a reference because we know that there is
a direct relationship between power and torque. Although these pulsations do not produce average torque, they do intensify the engine vibration,
what makes single phase induction motors
noisier than three-phase motors of the same size. There is no way to
eliminate these pulsations, because in a single-phase circuit the instantaneous power
it always occurs in pulses.
Assume that the motor rotor is rotating in the direction of the field, which in turn rotates progressively (counterclockwise) at a
speed n (rpm). Let's represent synchronous speed as nS. So the slip sp
for the progressive field is given by
eq. 108-01
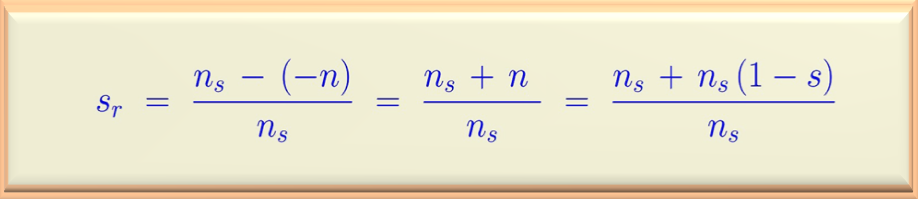
Now suppose that the engine rotor rotates in a counterclockwise direction.
Then, the slip sr for the retrograde field with respect to the forward field is given by
eq. 108-02
Therefore, algebraically developing the above equation, the slip sr for the retrograde field is given by
It is a theory between the voltages and currents that the stator's stationary magnetic field can induce in the stator's bars
rotor when it is in motion.
Consider a single-phase induction motor with a rotor that has been brought to the
operating speed through some external method. Voltages are induced in the bars of this rotor, with the voltage
peak occurring in windings that pass directly below the windings
of the stator. In turn, these voltages produce a current flow in the rotor which,
Due to its high reactance, it lags behind the voltage by almost 90°. As
the rotor is rotating close to synchronous speed, this time interval of 90°
in the current produces an angular displacement of almost 90° between the voltage plane
rotor peak and the peak current plane.
The rotor magnetic field is smaller than the stator magnetic field
due to losses in the rotor, but they differ from each other by approximately 90° both
in space as in time. If these two magnetic fields are added together
different instants, we will see that the total magnetic field of the motor is rotating
counterclockwise. With a magnetic field present in the
motor, the induction motor will develop a net torque resulting in the
of movement and this torque will keep the rotor rotating.
If the engine rotor had initially been turned clockwise,
then the resulting torque would be clockwise and again keep the rotor turning.
The double rotating field theory is fundamental to understanding the operation of single-phase induction motors.
When the stator is powered by a single-phase source, it actually creates two rotating magnetic waves of equal
magnitude, but which rotate in opposite directions. These waves are crucial because one of them interacts with the rotor to
produce the torque necessary for engine operation.The other wave, rotating in the opposite direction, does not contribute to
torque and can even harm engine efficiency. Therefore, engineers and engine designers look for ways
to minimize the effects of this contrary wave to improve engine performance. The analysis of this theory allows a
more accurate assessment of the engine's starting and operating characteristics, as well as its efficiency and power factor.
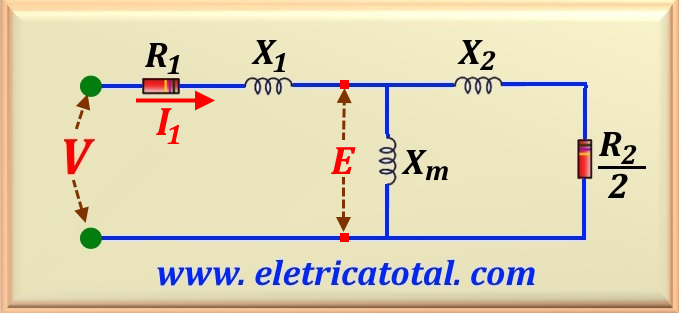
The best way to start analyzing a single-phase induction motor is
examining the engine when it is stopped. At this point, the engine can be idealized as
a single-phase transformer operating with its secondary circuit in
short circuit. Thus, its equivalent circuit is that of a transformer. This circuit
equivalent is shown in Figure 108-04.
Figure 108-04
In this model the variables involved are:
R1 - stator winding resistance.
X1 - leakage reactance of the stator winding.
Xm - magnetization reactance.
R2 - rotor resistance referenced to the stator.
X2 - rotor leakage reactance referenced to the stator.
V - single-phase stator supply voltage.
E - voltage induced in the stator winding by air (or air gap voltage).
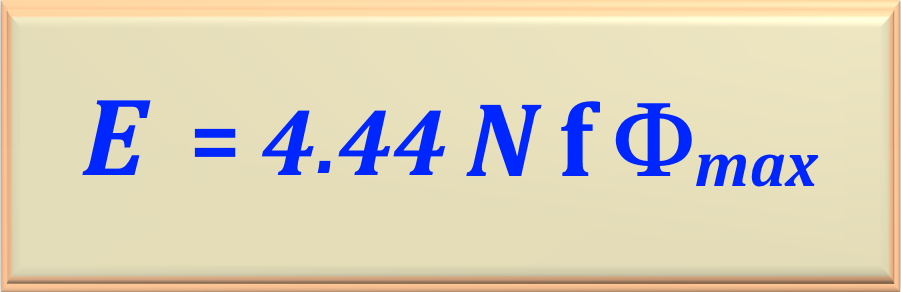
It is interesting to highlight that the voltage E is produced by the stationary pulsating flow promoted by the
combination of stator and rotor currents. Note that we are assuming the rotor is stopped. The voltage E produced is
defined by eq. 108-04.
eq. 108-04
where Φmax is the air gap flux.
Analyzing the behavior of electric motors when stopped is essential for understanding how they work
and for carrying out accurate diagnoses. In the case of a stopped motor, the pulsating magnetic flux in the air gap can,
in fact, be divided into two rotating fields of equal magnitude but in opposite directions. This division results in two
components that interact with the rotor circuit, causing both resistive and reactive voltage drops.
Understanding this interaction is crucial, as it allows the rotor equivalent circuit to be divided into two parts.
that reflect the effects of each magnetic field. This division is a direct application of rotating field theory,
which is a pillar in the analysis of electrical machines, especially those that operate with alternating current.
Furthermore, the air gap concept is essential for engine design and analysis, as it is the space where engine
magnetic interaction between the stator and rotor, being a critical factor for the efficiency of the motor.
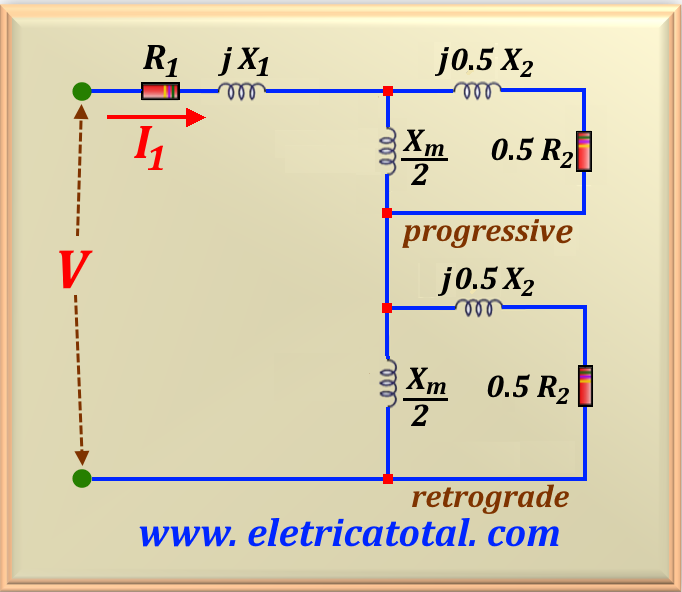
It is possible to divide the rotor equivalent circuit into two sections, each
corresponding to the effects of one of the magnetic fields. The equivalent circuit of the
motor, including separation of effects due to progressive magnetic fields
and retrograde is shown in Figure 108-05. Keep in mind that, considering the engine stopped, the slip value
reduces to s = 1.
Figure 108-05
In this way, the two halves, in the stationary rotor condition,
have the same slip with respect to each rotating field.
The effective rotor resistance in an induction motor is a crucial factor that influences the motor's performance,
especially in relation to the relative movement between the rotor and stator magnetic fields. The progressive magnetic field,
which rotates in the same direction as the rotor rotation, and the retrograde magnetic field, which rotates in the opposite direction, contribute in a
different for the rotor resistance. When the motor is running, the effective resistance of the rotor to the field
progressive field is different from that for the retrograde field due to the slip variation, which is the difference between the
speed of the rotating magnetic field and the actual speed of the rotor. This phenomenon is fundamental to understanding the
dynamic behavior of induction motors and for the development of speed and torque control methods more
efficient.
For the progressive magnetic field, the difference per unit between the rotor speed and the magnetic field speed
is the slip s, being the
slip defined in the same way as in the three-phase induction motor. Therefore, the rotor resistance in the circuit part
associated with the progressive magnetic field is 0.5 R2 /s.
The progressive magnetic field rotates at speed nsync and the magnetic field
retrograde rotates at speed - nsync. Therefore, the total difference in speed per
unit (based on nsync) between the progressive and retrograde magnetic fields is 2.
Since the rotor is rotating at a speed s less than the magnetic field
progressive, the total difference in speed per unit between the rotor and the retrograde magnetic field
is 2 - s (see this result in eq. 108-03).
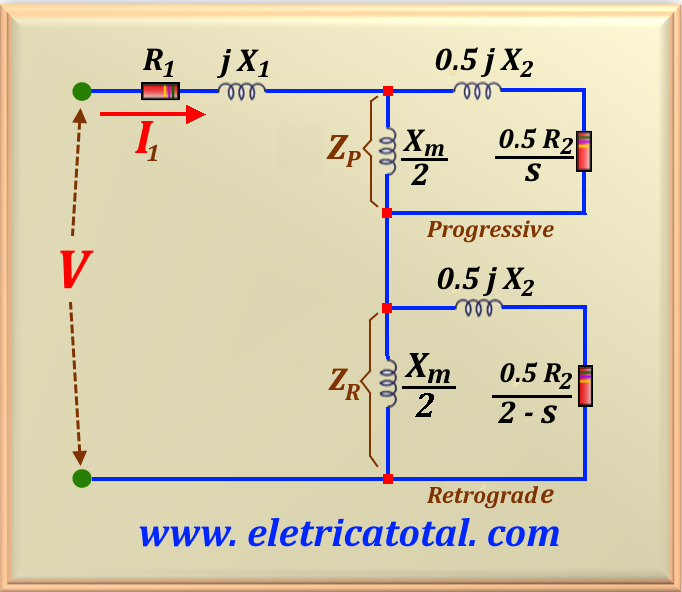
Therefore, the effective resistance of the rotor in the circuit part
associated with the retrograde magnetic field is 0.5 R2 / (2 - s).
See the final equivalent circuit of the moving single-phase induction motor in Figure 108-06.
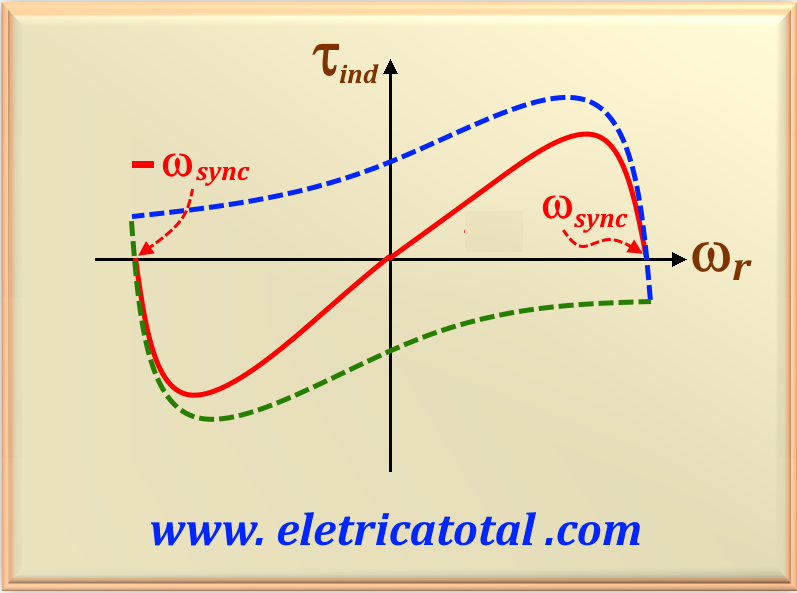
Power and torque relationships in electric motors are fundamental to understanding the performance and efficiency of these machines.
In single-phase motors, these relationships are also applicable, considering the progressive and retrograde components of the magnetic field.
The net power of a single-phase motor is the difference between the powers associated with each of these fields, while the torque
net is the difference between the conjugates they produce. This principle is essential for engine design and analysis
single-phase. In Figure 108-07 we see a diagram of torqueversusspeed.
Figure 108-07
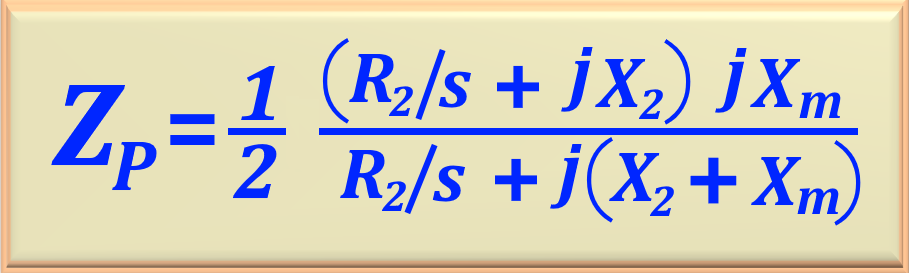
To make the calculation of the motor input current simpler, it is customary to
define the impedances ZP and ZR, where ZP is a single impedance that is equivalent
to all impedance elements of the progressive magnetic field and ZR is a
single impedance that is equivalent to all impedance elements of the retrograde magnetic field. This representation is shown
in Figure 108-07a.
Figure 108-07a
This way, simply by looking at the circuit shown in Figure 108-07a it is possible to determine the values of
ZP and ZR, as it is enough to verify that it is the calculation of the equivalent
impedance represented by the elements
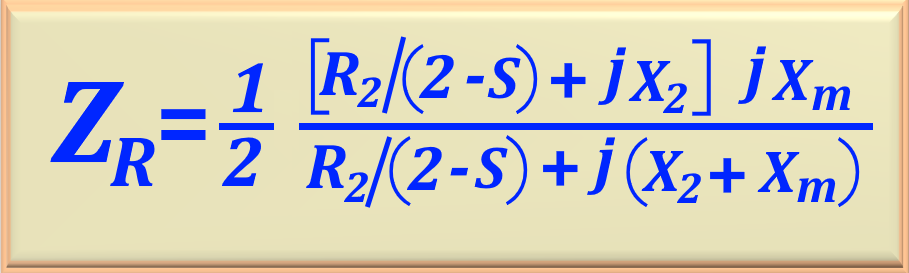
which are connected in series and parallel. Thus, using eq. 108-05 and eq. 108-06 we will find the impedance values
progressive and retrograde.
eq. 108-05
eq. 108-06
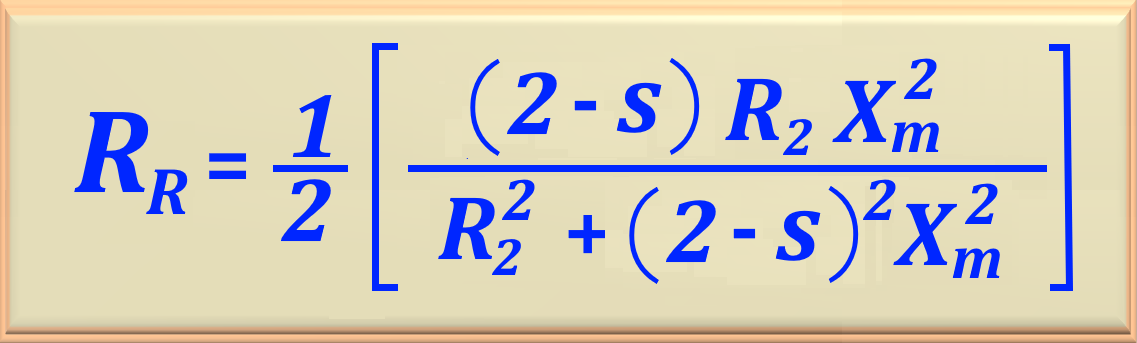
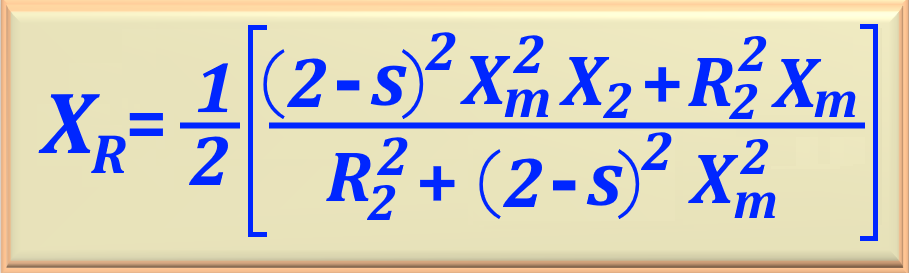
Note carefully that after the numerical calculation of the values of ZP and ZR, looking at these
equations in rectangular form, we verify that there will be a real value added to an imaginary value.
In ZP, the real part represents the progressive electrical resistance, RP , while the imaginary part
represents the progressive electrical reactance, XP. Obviously, the same is true when we analyze the retrograde impedance.
In ZR, the real part represents the retrograde electrical resistance, RR , while the imaginary part
represents the retrograde electrical reactance, XR. These values represent the Thévenin equivalent of the circuit.
So, it is possible to write:
eq. 108-6a
eq. 108-6b
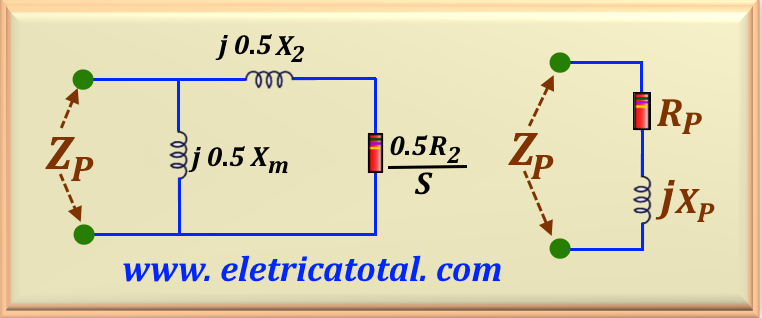
In Figure 108-08 we can see how we transform the circuit to obtain RP and XP.
Obviously, the same is true when we analyze the retrograde impedance.
Figure 108-08
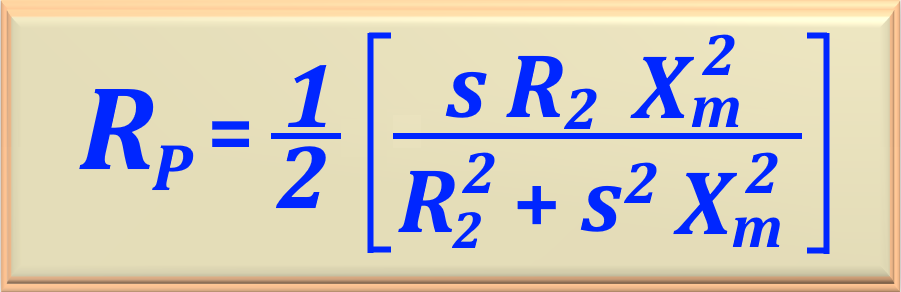
To complete this analysis, using eq. 108-05 and carrying out the operations indicated in the equation, we arrive at a final result
where we obtain
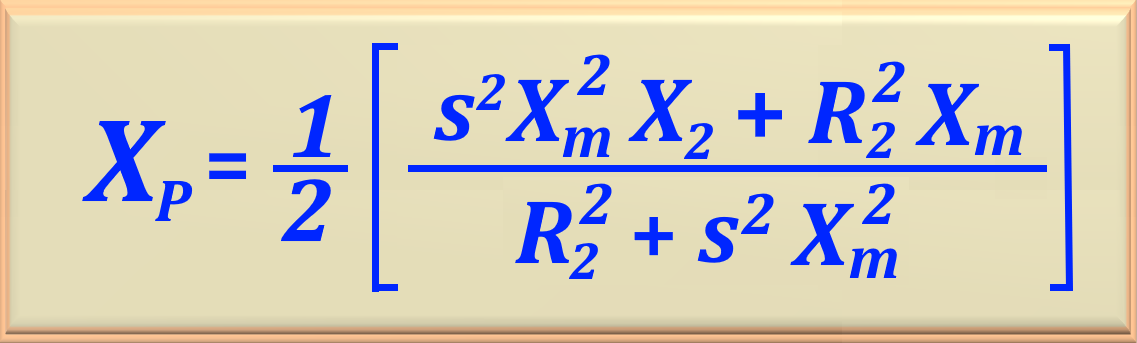
the real part and the imaginary part of ZP. Taking into account that in general, Xm >> X2 and, therefore,
we can write Xm + X2 ≈ Xm getting the results
shown in equations eq. 108-7a and eq. 108-7b.
eq. 108-7a
eq. 108-7b
These equations are valid for the progressive field. Doing the same for the retrograde field, starting from eq. 108-06
and carrying out the appropriate operations and simplifications, we arrive at the equations eq. 108-8a and eq. 108-8b.
eq. 108-8a
eq. 108-8b
Important Note
"Note that when using these equations there is no need to work with complex numbers.
There is a pdf available showing how we arrived at these equations. In addition, the results obtained with these equations are compared to those
results of the example 9-1 from the book by Chapman, page 595, 5th edition. If the reader is interested in
read the pdf, enough
Click here"
After understanding the theoretical part involved in a single-phase induction motor, we can prepare a study to
determine the various engine parameters.
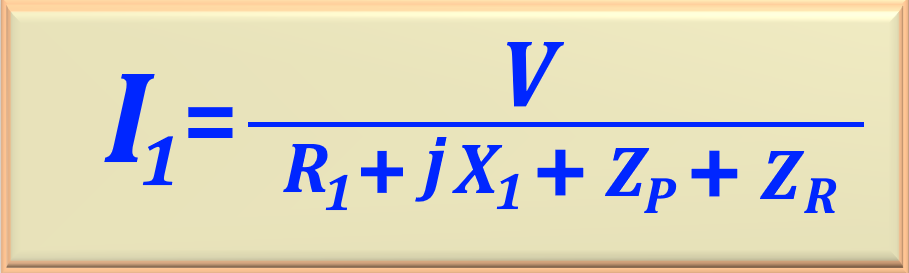
Let's start by determining the motor input current, represented by I1. Note that eq. 108-09 is
obtained from the circuit shown in Figure 108-07a.
eq. 108-09
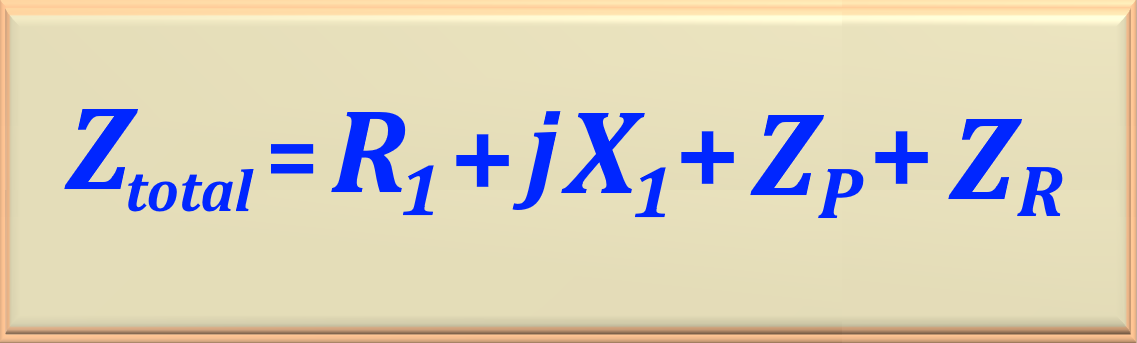
Note that the denominator of eq. 108-09 is the total impedance of the motor. In this way, we can write the
eq. 108-09a.
eq. 108-09a
It is important to note that the progressive air gap power of a single-phase induction motor is the power
consumed by RP, given that the progressive resistor RP is the only resistor
present in the progressive impedance ZP. Similarly, the engine's air gap retrograde power is the power
consumed by RR. Thus, the air gap power of the engine can be found by calculating the difference
between the power consumed by RP and the power consumed by RR. To maintain a nomenclature
compatible with what was studied in three-phase induction motors, we will call the air gap power Pgap.
Thus, the progressive power in the air gap will be represented by PPgap and the regressive power in the air gap as
PRgap. So, we can write:
eq. 108-10
This equation represents the value of the power developed by the rotor to produce a torque necessary to maintain the rotor rotation.
This difference between the quantities PPgap and PRgap is due to the fact that the progressive and retrograde fields
act in opposite directions and, as a result, they subtract each other. Thus, we can determine how much of this power will be transformed into
mechanical power using eq. 108-27 (see item 4.7). Note carefully that PgapNO represents losses
in the motor copper due to the progressive and retrograde field. These losses are provided by eq. 108-21 (see item 4.6).
And the progressive power in the air gap is given by:
eq. 108-11
And the retrograde power in the air gap is given by:
eq. 108-12
Replacing the respective values in eq.108-10 with eq. 108-11 and eq. 108-12, we obtain:
eq. 108-13
Important Note
"Attention must be paid to eq. 108-10, as this equation expresses the power that will be transformed into power
"mechanics" for the rotor. That is,
This power will be directly related to the torque induced in the engine rotor, a torque that is essential to keep the engine moving.
It is worth noting that, in technical literature, the symbols used in equations are fundamental for the correct understanding of mathematical concepts.
The choice between adding or subtracting quantities can significantly change the meaning and result of an equation. Like this,
Many technical literatures present this equation,
using the same symbology, however, adding the two quantities instead of subtracting them.
In reality, this sum refers to the electrical losses in the copper winding of the rotor."
Therefore, the reader should be aware when the author states that copper losses are the sum of
losses in the progressive field with that of the retrograde field. In this case, he is referring to "electrical" losses and not
"mechanical power". Therefore, it is essential that the reader is aware of these nuances
to avoid confusion and ensure the accuracy of calculations related to engine performance."
When we studied the three-phase induction motor we saw that the torque induced in the rotor was given by eq. 107-32, repeated below for
greater clarity.
eq. 107-32
Note that we use the synchronous speed in rad/s according to the frequency of the
network that powers the motor, as remember that the progressive and retrograde fields rotate at this speed.
It is also worth remembering the relationship between the machine's synchronous speed, ωsync, the number of machine poles, P,
and the network frequency, f, given by eq 108-14.
eq. 108-14
Since the two fields, progressive and retrograde, are rotating in opposite directions, the torque produced by the two fields are opposite.
Then, the resulting torque developed is the difference between them, according to eq. 108-15.
eq. 108-15
Using eq. 108-13, it is also possible to express torque as eq. 108-16.
eq. 108-16
All these equations make it possible to calculate the induced torque in the engine. When we need to calculate
the torque on the shaft of the motor, that is, when the motor is under load, then we must use the
eq. 108-17, below.
The joule losses occur in the copper of the rotor both due to the progressive field and the retrograde field. Losses due to
progressive field are given by:
eq. 108-19
Losses due to the retrograde field are given by:
eq. 108-20
Therefore, the rotor copper losses are given by adding the losses due to the forward and backward field. Then,
the losses are:
eq. 108-21
Here it is important to point out that eq. 108-21 only calculates the copper losses in the rotor
due to the progressive and retrograde fields. It does not express the total losses in the motor's copper.
To do this, it is necessary to take into account the joule loss in the resistor R1, which can be calculated by
PR1 = R1 I12. This loss expresses the power lost in the
main winding resistance. So, the total losses
in the copper of the motor, which we will represent by Pcu , can be calculated by eq. 108-21a below.
After deducting the losses inherent to the operation of the engine,
such as copper losses due to electrical resistance, ventilation and friction losses, and supplementary and core losses,
mechanical power represents the energy effectively available to perform work, that is, that
power that can be converted from electrical to mechanical form. This power, known as
mechanical power can be expressed in several ways. Initially, we will define the relationship between the synchronous angular velocity
and the angular velocity of the shaft of the motor, ωr, which are related by the slip ,
according to eq. 108-22.
eq. 108-22
Thus, making the necessary equivalences we can write the mechanical power as:
eq. 108-23
Substituting eq. 108-22 in eq. 108-23, we obtain:
eq. 108-24
Substituting eq. 108-16 in eq. 108-24, we obtain:
eq. 108-25
And, based on eq. 108-11 and eq. 108-12, it is also possible to write eq. 108-26, or:
eq. 108-26
Simplifying the above expression further, we can also write that
eq. 108-27
Note that depending on the data provided in the problem statement, we have several alternatives to calculate the mechanical power.
The rated power of a single-phase induction motor, indicated on the nameplate, is crucial data for users,
as it represents the maximum working capacity of the engine under normal operating conditions. This power, expressed in HP (Horse Power),
can be converted to the international system of units as watts, using the equivalence that 1 HP is equal to 746 watts.
The nominal power, or output power Pnom, is the mechanical energy available on the motor shaft, already discounting all
losses inherent to the operation of the motor, including rotating losses. Here, we will symbolize
rotating losses due to Prot, which include ventilation losses,
friction, in the iron core and, often, losses in the copper. Understanding these parameters is essential for the proper selection of an engine for any
specific application, ensuring that the engine can operate efficiently and safely within the requirements of the system in which it will be integrated.
This way, it is possible to write the nominal power equation according to eq. 108-28.
Note that the electrical power (measured in watts) absorbed from the power supply network by a single-phase induction motor is considered the
engine input power and is given by:
eq. 108-29
In this equation, cos φ represents the power factor of the motor, that is, it is the phase difference between the voltage
applied V and the input current I1.
We must also be aware that the machine's input power must satisfy eq. 108-30.
The efficiency, η, of a single-phase induction motor is given by the ratio between the nominal power, that is, the power that the motor
available on its axis and the input power, both measured in watts or another equivalent unit. So, we can write:
The study of the equivalent circuit of an induction motor is essential to understand the behavior of the
machine under different load conditions. To determine the values of the circuit elements that represent
the engine in operation, it is necessary to carry out a series of tests. These include the no load test, which determines the
iron losses and magnetization characteristics, and the short-circuit test, which provides information
on copper losses and dispersion impedance. Additionally, the locked rotor test can be used
to evaluate the rotor resistance and reactance when the motor is stopped. These tests are analogous to
carried out on transformers and are essential for accurate modeling of the motor, allowing its performance to be predicted
in different operating situations. The analysis of these tests contributes to the optimization of the engine design,
improving its efficiency and reliability in practical applications.
When a motor operates at no load, that is, without load, it consumes a minimum electrical current necessary to overcome the
internal losses, such as iron losses and friction and ventilation losses. The empty condition is important to determine
engine behavior in situations close to ideal operation. During a no-load test, the rated voltage is applied and
the electric current is measured by an ammeter connected in series with the motor, as well as the real power consumed, which is
indicated by the wattmeter. These measurements allow
calculate motor rotational losses, which are crucial for understanding motor efficiency and for designing systems that
use electric motors more effectively and economically. Therefore, this test is a valuable tool in
electrical engineering to evaluate the performance of motors under controlled conditions.
Due to the high reluctance in the air gap of an induction motor, the current circulating through the winding
of the stator is very high. Thus, the magnetization reactance, Xm, will be much smaller than
the resistances that are connected in parallel with this reactance. As a consequence, the factor
motor power becomes very low, indicating that most of the current supplied to the motor is out of
phase with tension, contributing little to the production of actual work. This delay current, predominantly
inductive, causes a significant voltage drop across the inductive components of the circuit.
Therefore, when the engine is running without load, there are two relevant simplifications to be made. The first
is in the case of the progressive rotating field, where the portion R2 / 2 s tends to be a very large value
due to the small slip value.
So, in this case, eq. 108-33 is valid.
eq. 108-33
The second simplification is in the case of the retrograde rotating field, where the portion X2 / 2 + R2 / 2 (s - 2)
is very small when compared to Xm / 2, as shown in eq. 108-34.
eq. 108-34
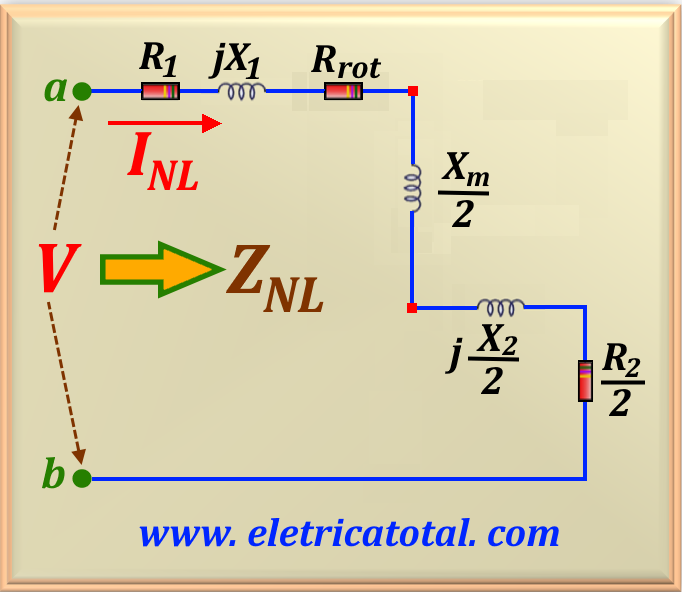
This allows us to assemble the equivalent circuit for the case of the engine operating empty, as shown
a Figure 108-10.
Figure 108-10
It is observed that a resistance called Rrot was added to the circuit, whose purpose is to represent the
rotational losses of the machine. Thus, the power consumed by this resistance represents rotational losses,
including losses in the iron-silicon core of the motor stator.
The current in the rotor due to the progressive flux is very small, so copper losses are neglected.
However, the current due to retrograde flow is significant, and the corresponding copper losses are represented by
0.5 R2, as shown in the circuit in Figure 108-10. Therefore, the wattmeter reading
corresponds to the powers consumed by R1 + Rrot + 0.5 R2. This series association of resistances
can be represented by a single resistance, which we will call empty resistance, whose symbol
representative is RNL. See eq. 108-35.
eq. 108-35
In the same way as we did for the empty resistance, we will define a empty reactance, as
we can deduce from the circuit shown in Figure 108-10. Represented by XNL, this
reactance is defined by eq. 108-36.
eq. 108-36
And, after defining the no-load resistance and the no-load reactance, we can
define the no-load impedance. Representing by ZNL and using the usual definition of impedance, the modulus of this
impedance is defined by eq. 108-37.
eq. 108-37
And finally, the power read by the wattmeter will be represented by PNL. This power is directly related to
the current measured by the ammeter and with RNL, according to eq. 108-38.
4.11.2 Single-Phase Induction Motor withLocked Rotor
The described method is a standard procedure for testing electric motors for short circuits.
The short circuit voltage, VSC, is carefully controlled to be less than the rated voltage,
avoiding damage to the engine due to overheating. The current measured by the ammeter during the test
should be comparable to the motor's full-load current, providing an indication of winding health
and engine efficiency. Furthermore, the blocked rotor condition, where s = 1, simulates a situation
maximum load on the engine, allowing the analysis of engine behavior under extreme conditions. This test
is crucial to ensuring the safety and reliability of electric motors before they are put into operation or after repairs.
With this information it is possible to recreate the equivalent circuit of the engine. See Figure 108-11.
Figure 108-11
We must note that since the motor has a blocked rotor and, therefore, s = 1, the resistance R2 / s
reduces to R2, which is a very small value. Therefore, as the values of R2 and X2
are small, the motor input current, ISC, will circulate almost entirely through these components, instead of circulating
by the magnetization reactance, Xm, which has a much higher value. So, we can say that under these conditions
the circuit can be considered as a series of components R1, X1, R2
and X2. Thus, from the circuit shown in Figure 108-11, we easily see that the power, PSC,
measured by the wattmeter is given by:
eq. 108-40
It can be seen that we can calculate the power factor directly, as we know the other variables.
This data informs the phase angle between the applied voltage, VSC, and the electric current, ISC.
From the circuit, it is also possible to conclude that:
eq. 108-41
Another information that can be removed from the circuit is the electric current, Im, according to eq. 108-42.
eq. 108-42
Where the value of Zm is given by eq. 108-42a.
eq. 108-42a
Now, knowing the value of ISC and Im, we can easily determine the value of Ir
using eq. 108-41. And knowing the value of Ir, we can determine the impedance formed
through the circuit where the current Ir flows. Calling this impedance Zsec (secondary) we can
express it through eq. 108-43 in its Cartesian form.
eq. 108-43
It is important to solve many problems the relationship between the modulus of the impedance and its respective parts
real and imaginary. Therefore, we must pay close attention to eq. 108-44.
eq. 108-44
Another important fact that we must highlight
is that this method finds the total resistance value, that is, R1 + R2. Then,
To find the value of R2 we must know the value of R1. To find the value of
R1 we can use the method described in item 4.11.3, below.
It is worth noting that, in general, it is a consensus to establish a relationship between X1 and X2 of shape
quite practical, or X1 = X2.
Another widely used method to determine the electrical resistance of the motor magnetization winding, in this case R1,
is with the use of a variable DC voltage source
and a DC ammeter. The DC source voltage, VDC, is adjusted until the ammeter reads a current, IDC, equal to
rated current of the motor.
As a result, after some time, the winding will heat up and the measured resistance value will be very close to the real value when
the motor is operating at full load (as we know that the electrical resistance of the winding is a function of temperature).
It is also known
that the reactance of the motor is null when subjected to direct current, as well as there will be no voltage induced in the rotor. So, we can
determine R1, given that the only quantity that limits the current in the winding is the stator resistance. This value is given
by eq. 108-45.
eq. 108-45
It is important to highlight that this method does not take into account the skin effect, which is a relevant phenomenon in the study of alternating currents, as it directly affects the distribution
of electrical current within the conductors. This effect occurs due to the tendency of the current to concentrate in the
conductor surface, increasing apparent resistance and, consequently, losses due to the Joule effect.
The intensity of this effect is related to the frequency of the alternating current, the magnetic permeability
and the electrical conductivity of the conductor material. Because of this, for higher frequencies, the depth
current penetration decreases, which justifies the application of a correction factor by manufacturers to the value
of resistance calculated for direct current, according to eq. 108-45, in order to obtain a more accurate estimate for
alternating current. The mentioned variation from 10% to 20% is a practical measure to compensate for the increase in resistance
due to the skin effect, thus ensuring the efficiency and safety of electrical systems. It is essential that
engineers and technicians consider this phenomenon when designing and analyzing systems that operate with alternating current,
especially at high frequencies.
Single-phase induction motors are widely used in residential and commercial applications due to their relatively low cost
and simplicity of design. However, as mentioned, they do not have inherent starting torque. To overcome this, the techniques
most common include the use of a starting capacitor, a split-phase auxiliary winding, and a induction motor with
permanent capacitor. The starting capacitor provides a phase shift necessary to create a rotating magnetic field, which can start
the movement of the rotor. The auxiliary winding, on the other hand, is energized only during starting, providing the necessary torque.
The permanent capacitor motor has a capacitor that is connected to the auxiliary winding throughout the operation, improving the
engine performance at varying loads. Each of these techniques has its advantages and limitations, and the choice depends on the
specific application and torque requirements. Thus, we can summarize the three techniques used in practice.
Split phase windings.
Windings with capacitors.
Shaded stator poles.
All of these starting techniques are methods in which one of the motor's two rotating magnetic fields is made stronger than the other.
In this way, the rotor receives a starting torque in a certain direction.
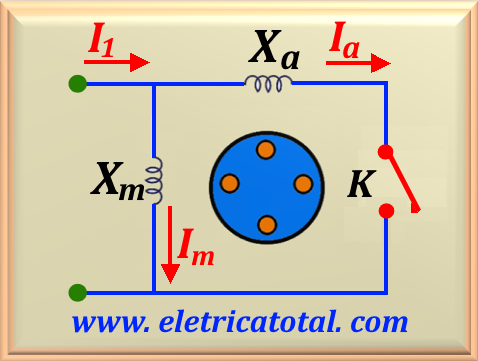
The split phase motor is a classic type of induction motor, widely used in applications that do not require
a high starting torque. The 90° phase shift between the stator windings is essential to create a magnetic field
rotary, which is what allows the engine to operate. The main winding is responsible for continuous operation,
while the auxiliary winding, in conjunction with the centrifugal switch, is used only during starting to help
overcome the initial moment of inertia. The centrifugal switch is connected in series with the auxiliary winding.
The split phase motor is a classic type of induction motor, widely used in applications that do not require
a high starting torque. The 90° phase shift between the stator windings is essential to create a magnetic field
rotating, allowing the engine to operate. The main winding is responsible for continuous operation,
while the auxiliary winding, in conjunction with the centrifugal switch, is used only during starting to help
overcome the initial moment of inertia. The centrifugal switch is connected in series with the auxiliary winding.
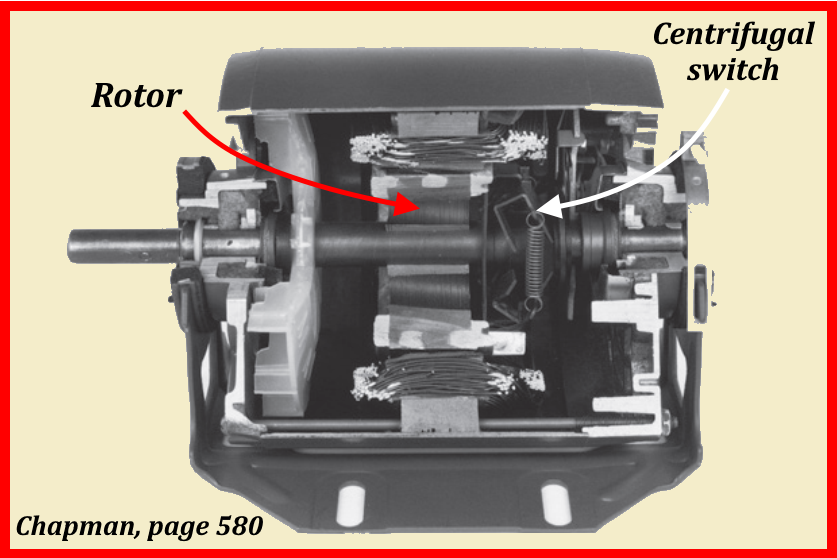
Figure 108-12
In Figure 108-12 we can see an internal image of this type of engine showing the main components, highlighting
the position of the centrifugal switch.
In Figure 108-13 we can see the simplified equivalent circuit of this type of motor.
Figure 108-13
An important fact in this type of motor is to design an auxiliary winding that has a ratio
resistance/reactance higher than in the main winding. To achieve this objective,
typically, a thinner gauge wire is used for the auxiliary winding.
This is possible because electrical current only flows in the auxiliary winding during starting. This avoids continuous circulation
current, which would cause the winding to overheat. Due to the higher ratio of resistance/reactance in
auxiliary winding, the electric current in this winding will suffer a small delay in relation to the applied voltage. Already in the main winding
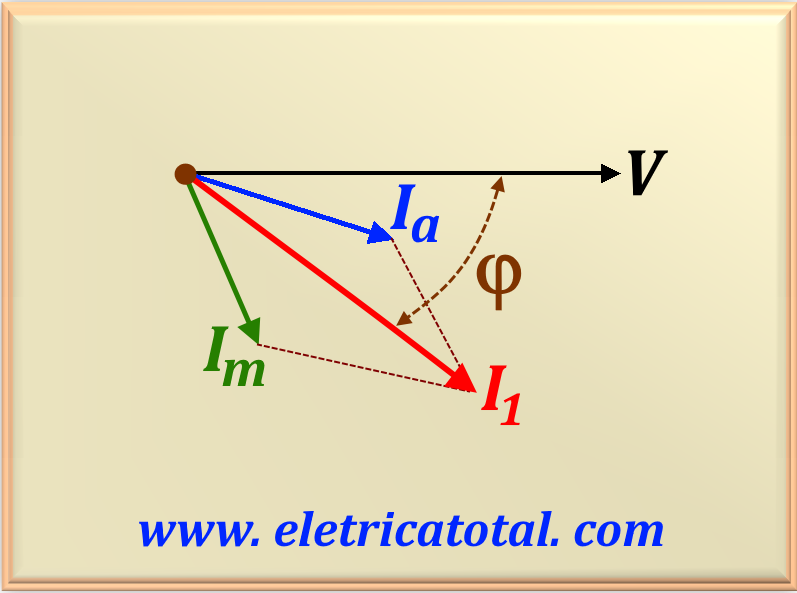
this delay will be much greater. As a result, the current in the auxiliary winding will be advance in relation to the
current in the main winding. In this way, the auxiliary winding causes one of the opposing rotating magnetic fields of the rotor to be
greater than the other, producing a net starting torque for the engine. The phasor plot shown in Figure 108-14
enhances what was stated above.
Figure 108-14
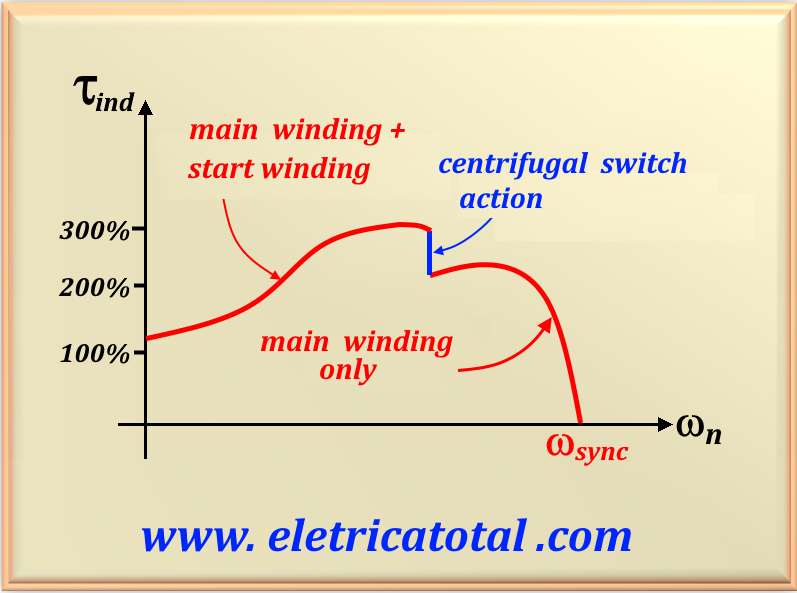
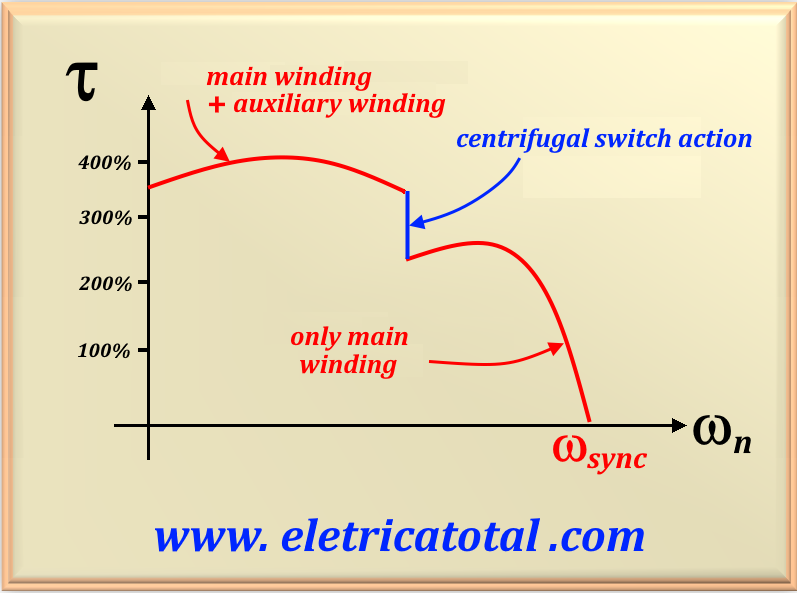
Split-phase motors have a moderate starting torque with a low starting current. Starting torque can be increased
inserting a resistance in series with the auxiliary winding. See Figure 108-15 for the graph showing the behavior of
centrifugal wrench on engine torque.
Figure 108-15
They are used in applications that do not require very high starting torques, such as fans,
blowers and centrifugal pumps. They are available in sizes in the fractional power range and are very inexpensive.
Important Note
"The direction of rotation of the motor depends on the
spatial angle of the auxiliary winding magnetic field is 90° forward or
90° behind the main winding angle. How can this angle be reversed
from 90° forward to 90° backward simply by changing the auxiliary winding connections,
then the direction of rotation of the motor can be inverted by changing the
auxiliary winding connections, and leaving the main winding connections unchanged."
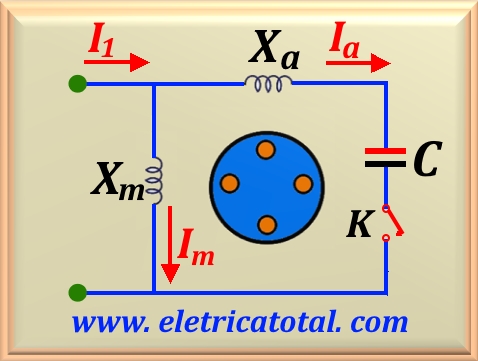
The use of a starting capacitor in electric motors is a common practice to improve starting torque,
especially in single-phase motors. The capacitor, when connected in series with the auxiliary winding,
creates a phase shift between the currents flowing through the motor coils. This results in a field
additional rotating magnet that helps the motor start its rotation. The ability to adjust the strength
magnetomotive starting current of the auxiliary winding so that it is equal to that of the main winding
is crucial as it allows for a more efficient and smooth start. This method is particularly useful in applications
that require robust starting torque, such as fans, pumps and some household appliances. However,
i t is important to note that the capacitor must be sized correctly for the specific application in order to
prevent premature failures and ensure engine operational efficiency.
See Figure 108-16. Note that, with the insertion of the capacitor in the auxiliary winding,
we can control how much the current in the auxiliary winding will be ahead of the current in the
main winding. To do this, simply vary the capacitance of the capacitor.
Thus, the phase angle of the current in the winding
auxiliary current may be such that the current will be in advance of 90° in relation to the current
of the main winding. Since the two windings are physically separated
of 90°, a phase difference between the currents of 90° will produce a
simple uniform rotating magnetic field and the motor will behave exactly
as if it were starting with a three-phase power source. In that case, the
Motor starting torque may be greater than 300% of its nominal value. Thus, if the phase motor
split does not have sufficient starting torque for the application for which it was intended, it may
be replaced by a motor with a starting capacitor.
Typical applications of these motors are in compressors, pumps,
air conditioning and other types of equipment whose starts occur with load.
Figure 108-16
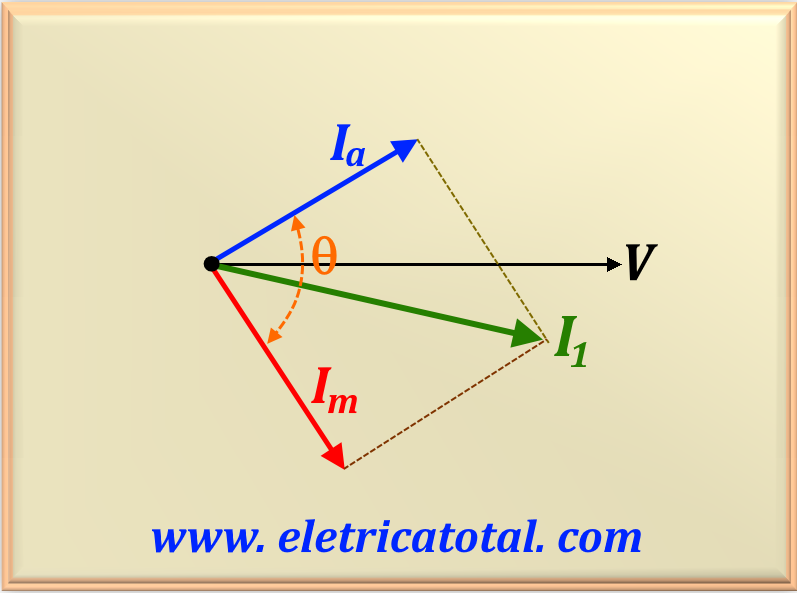
In Figure 108-17 we can see a diagram of the phasors of the currents involved in the torque generation process.
This type of motor presents a torque directly proportional to the sine θ, with the angle θ being the
angle between the currents Im and Ia. Naturally, maximum torque occurs
when θ = 90°. In this configuration, when starting the engine we have I1 = Im + Ia
Figure 108-17
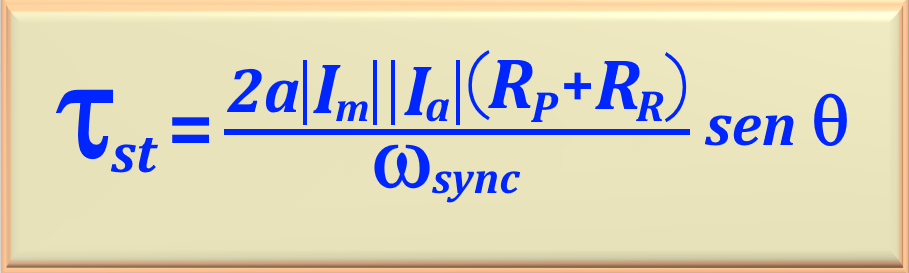
To find an equation that defines the starting torque of this engine we use the equation eq. 108-15 shown below.
eq. 108-15
Let's define the variable a as the turns ratio between the auxiliary winding and the main winding. Considering that in
starting s = 1, we can write the following equation for the starting torque (start), τst:
eq. 108-46
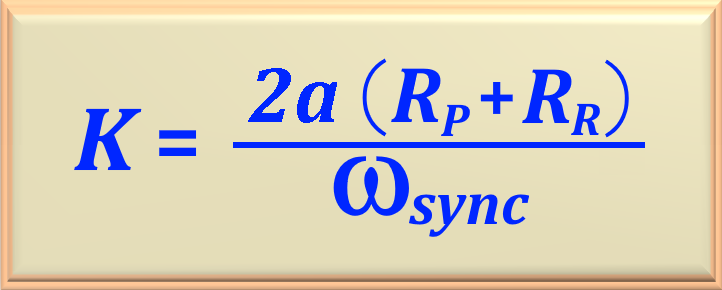
It is common, in technical literature, to define a new variable by the letter K, in such a way that:
eq. 108-47
So, the equation eq. 108-46 appears in most technical literature as eq. 108-48below.
eq. 108-48
In Figure 108-18 we can see the torque graph for this type of engine. Note the significant increase in
starting torque when compared to the capacitor less motor torque shown in Figure 108-15.
The starting capacitor does such a good job of improving the torque characteristic versus
speed of an induction motor that sometimes the winding
auxiliary with a smaller capacitor is left permanently in the motor circuit.
If the capacitor value is chosen correctly, this motor will have a perfectly rotating magnetic field
uniform for some specific load and it will behave
exactly like a three-phase induction motor at that point. This motor is called a permanent capacitor motor
or capacitor-run motor. Permanent capacitor motors
are simpler than capacitor-start motors, because the
starter key is not required. For normal loads, they are more efficient, having
a higher power factor and smoother torque than conventional motors
ordinary single-phase induction.
However, permanent capacitor motors have a starting torque
lower than capacitor-start motors because the capacitor must be
dimensioned with a certain value to be able to balance the winding currents
permanent and auxiliary load under normal load conditions. How does the starting current
is much greater than the normal charging current, a capacitor that balances the phases with
normal loads will leave these phases very unbalanced under operating conditions
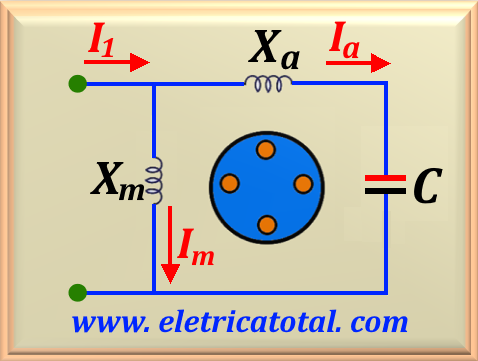
match. In Figure 108-19 we see a simplified equivalent circuit of this type of motor.
Figure 108-19
Note that in this configuration the relationship shown in eq. 108-49 is valid for any and all instants of engine operation.
eq. 108-49
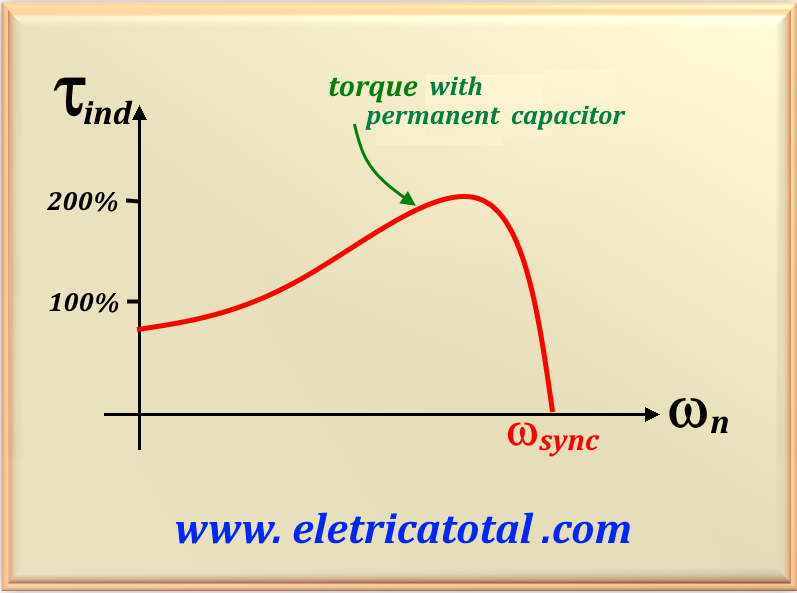
Analysis of the torque graph of a permanent capacitor motor, as shown in Figure 108-20,
reveals that the starting torque is not maximized. This can be attributed to several factors, including the
motor configuration and capacitor characteristics. Permanent capacitor motors are known
for its ability to maintain a constant torque during operation, but starting torque may be limited
if the capacitor is not properly sized or if the circuit configuration is not optimized.
Furthermore, it is important
ensure that the engine is correctly sized for the application in question and that all components
are working as expected. Regular maintenance and testing of capacitors can help identify
and correct problems that may be affecting engine performance.
Dual capacitor motors are an effective solution for applications that require high starting torque.
The use of two capacitors, one for starting and one for continuous operation, allows the motor to develop
stronger starting torque and improve efficiency during regular operation. The starting capacitor, with value
higher, is crucial during the first moments after activation, as it works to balance the currents
between the main and auxiliary windings, resulting in a higher starting torque. Once the engine reaches
its rated speed, the centrifugal switch system deactivates the starting capacitor, leaving only the starting capacitor
permanently in operation. The latter, being of lower value, generally between 10% to 20% of the starting capacitor,
is optimized to maintain current balance under normal load conditions, thus ensuring optimal operation
efficient and stable engine. This dual capacitor configuration is particularly useful in equipment that
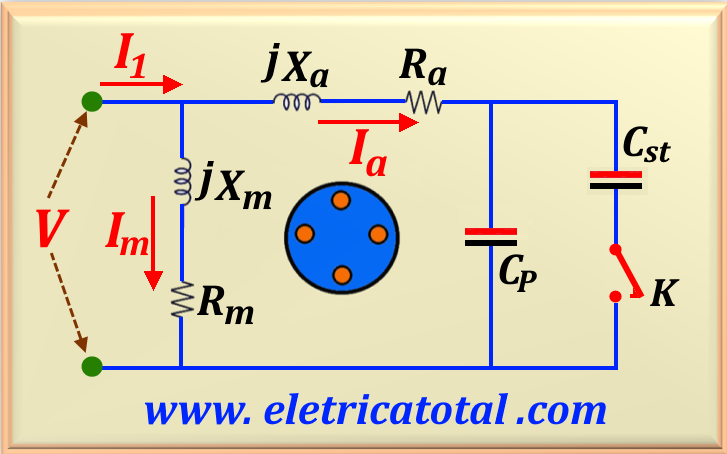
face heavy loads or that need to overcome great initial inertia. See Figure 108-21 for
equivalent circuit of this type of engine.
Figure 108-21
Single-phase dual-capacitor motors, which include a starting capacitor, Cst, and a permanent capacitor, CP, offer advantages
significant in terms of performance. The starting capacitor provides a substantial increase in starting torque, facilitating
starting the engine under load.
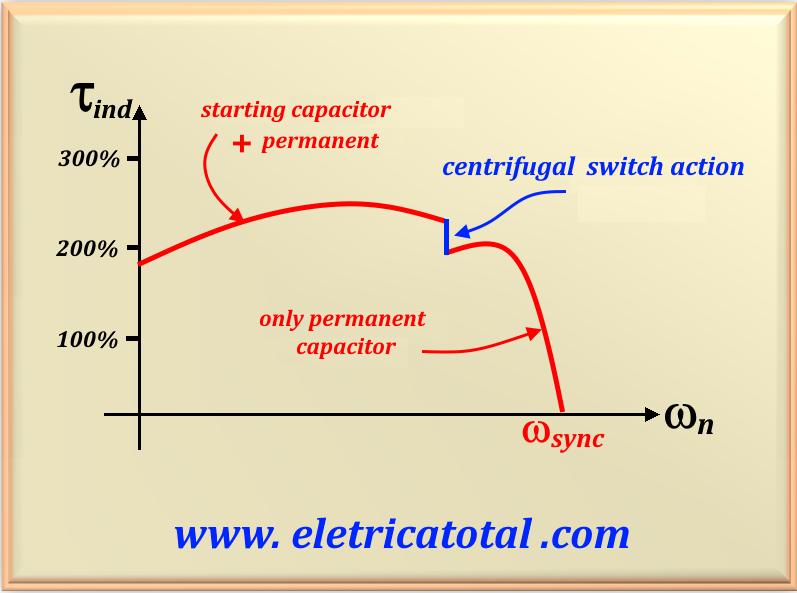
In Figure 108-22 we can see the graph of the torque developed by the motor with two capacitors. Notice how the
starting torque is much higher than that of a motor with a permanent capacitor.