DC machines are like AC machines in the sense that they contain AC voltages and currents inside. The DC machines
have a DC output because there is a mechanism, called a commutator, which converts the internal AC voltages into DC voltages
at the output terminals. We have already studied the behavior of a machine in chapter 76 in 5.1 - Energy Generator
DC Electric(click here!). At that time, we used
example a machine formed by a single turn. However, in a real machine we have many turns forming a coil
which will be housed in grooves of a cylinder, formed by several juxtaposed sheets of silicon iron, constituting
a ferromagnetic core. This cylinder, called rotor, has several grooves to house several coils
which form the so-called armature winding. The ends of all coils are connected to the commutator. And the
brushes are in direct contact with the commutator, being responsible for the current flow inside the machine.
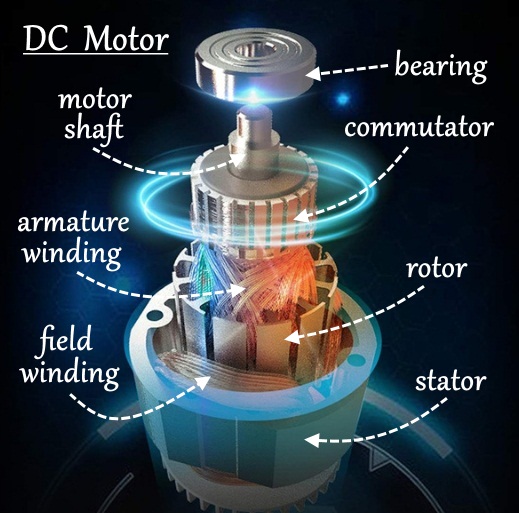
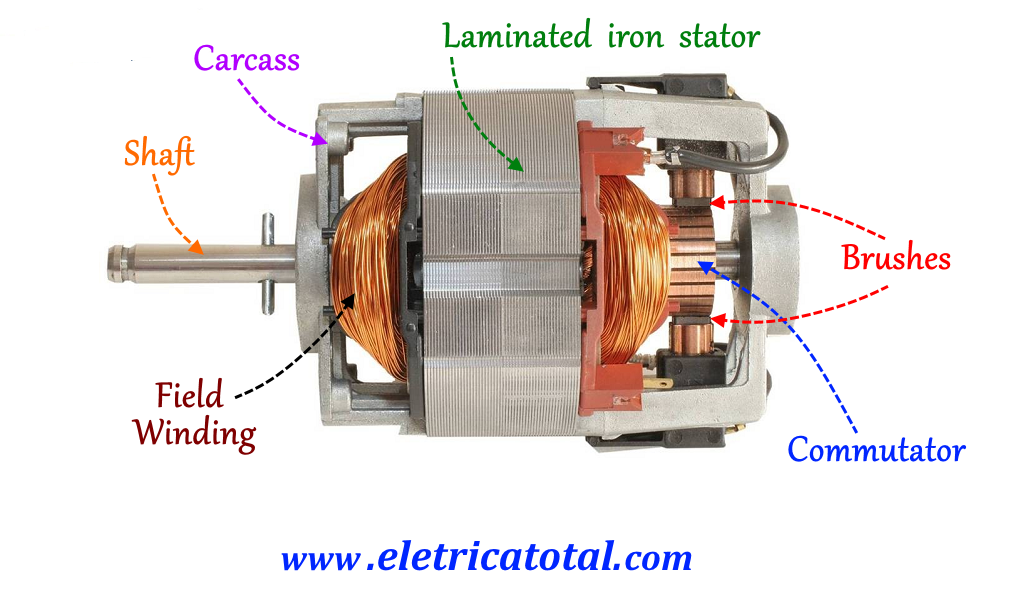
Figure 102-01
In Figure 102-01 we see the various parts that make up a DC motor, except for the brushes. Note that the rotor
it is centered inside the machine and supported by bearings so it can rotate freely with the least amount of friction.
Surrounding the rotor is the so-called stator, where the field poles responsible for
to produce the necessary magnetic field for the perfect functioning of the machine. In the picture above we have a pair of poles.
The construction of the machine provides that while one of the poles is north, the other will be south, alternately.
That way, in a machine, be it DC or AC, we must always have an even number of poles, like 2, 4, 6, etc... So many
It is sometimes spoken of as a number of pairs of poles. We can have 1 pair of polo, 2 pairs, 3 pairs, etc ...
switching is the most critical process in the design and operation of DC machines. To study this process of
convert AC voltages and currents to DC currents and voltages in the armature of a DC machine, let's look at the process in
a simple design of a dc machine to determine how the switching process takes place and what problems are involved
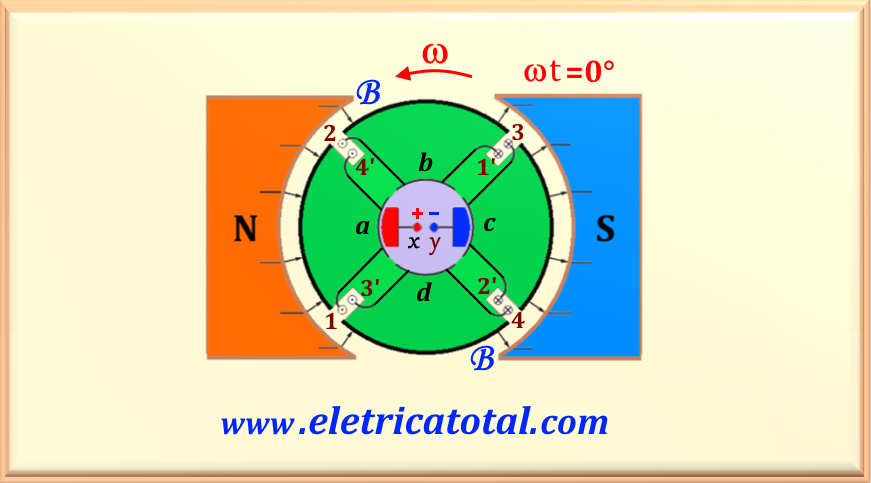
in this process. Let's assume a machine that has four complete turns housed in four open grooves in the steel.
laminate of your rotor. The machine has two poles, as seen in Figure 102-02. The figure shows the position of the rotor
when ω t = 0°.
Note that the faces of the poles are curved, following the curvature of the rotor, with a small gap of air between them
in the air gap. By maintaining a uniform gap, we obtain a homogeneous magnetic flux density at all points below
of the faces of the poles. Figure 102-02 also shows that the machine's windings are housed in a special way in the
grooves. For each loop, the side of the loop without the line mark (' ) is the conductor that is
on the outermost part of the groove, while the side with the line mark (' ) is the
conductor that is in the innermost part of the diametrically opposite slot. The winding connections
with the switch on the machine are shown in Figure 102-04.
Note that loop 1 extends between segments a and b of the commutator, loop 2
extends between segments b and c and so on around the rotor.
Fonte: Chapman - Fundamentos de Máquinas Elétricas[26]Figure 102-02
The connections of the windings to the commutator in a real machine can be seen in Figure 102-03.
Figure 102-03
At the instant shown in Figure 102-04, the sides 1, 2, 3' and 4' of the loops are
under the face of the north pole, while the sides 1', 2', 3 and 4 of the loops are
under the face of the south pole. The voltage on each of the 1, 2, 3' and 4' sides of the turns
is given by eq. 102-01 with the positive facing away from the page.
Figure 102-04
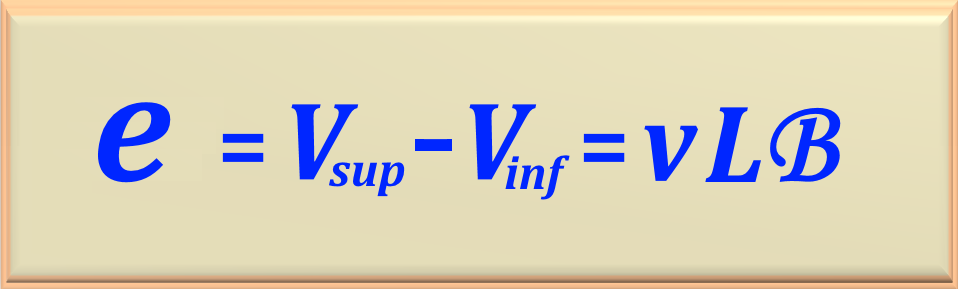
At this point, we pause to explain what happens to a conductor when it moves under the influence of a
magnetic induction field, B, constant.
"The magnetic force on the charge carriers of a moving conductor under the action of a uniform magnetic field B,
creates an electric field E = v B inside the conductor."
The electric field, in turn, gives rise to an electric potential difference between the two ends of the conductor in
movement. Then we can write:
eq. 102-01
We can analyze which voltage is generated in the armature winding when the rotor is in position ω t = 0°.
For this, we will base ourselves on Figure 102-05, where the position of the brushes in relation to the commutator
is shown. Note that the brush is in the center of the commutator not short-circuiting any windings. Therefore, the voltage
we are going to obtain on the brushes is the sum of the voltages obtained by the four upper windings. As each winding
produces a voltage equal to e, then the four windings in series will produce a terminal voltage
EA equal to 4 e. For the case of the four lower windings we have the same situation.
Thus, the two sets of windings are in parallel configuration.
Figure 102-05
As the rotor is turning, while the brush remains in contact with a single commutator element,
the output voltage will be 4 e. But what happens to the generated voltage if the brushes are
in contact with two adjacent commutator elements? This case happens when we are in the condition
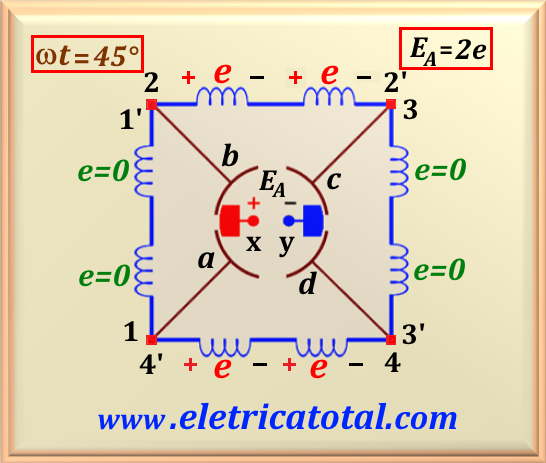
ω t = 45°. This is what Figure 102-06 shows.
Figure 102-06
Note that at this moment the brushes of the
machine short-circuit the segments a-b and c-d. this happens exactly
at the moment when the turns between these segments have 0 V, so that
shorting the segments does not cause problems. At that instant, only turns 2 and 4 are under
the pole faces, so that the terminal voltage EA equals 2 e.
It is important to note that these two situations above are repeated every 45° turn of the rotor.
Thus, at 90° we will have the same situation as at ω t = 0°. Although, in this case,
there is an inversion in the polarity of the armature voltage, the commutator is responsible for also
inverting the connections of the coils, resulting in EA = 4 e. The same goes for
ω t = 135° and the cycle is repeated every 45° of rotor rotation.
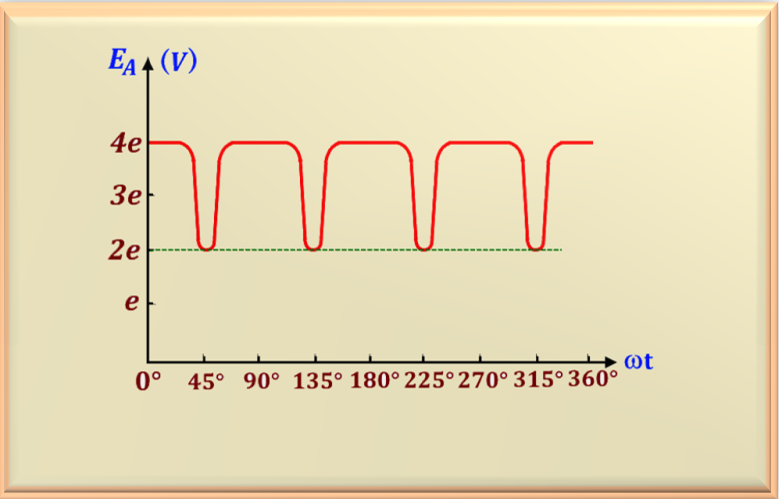
Figure 102-07
This is what the diagram in Figure 102-07 shows. Note that the armature voltage is equal to 4 e while
the coil is under the poles. Between the poles the voltage drops to 2 e.
We must pay attention to the fact that the values calculated above are for the hypothetical machine with only four
turns. For a real machine, where the number of turns is much higher, we will have other values that must be calculated.
So, increasing the number of turns in the rotor, the more the armature voltage approaches a perfect DC voltage.
It is worth pointing out a characteristic common to all commutation systems, which is the existence of two parallel
paths for the current inside the machine.
The DC machine, whether motor or generator, when rotating, produces an internal electrical voltage that we will call
of EA, and is given by eq. 102-02.
eq. 102-02
Therefore, as is clear from the above equation, the voltage EA is directly proportional to the flow and the speed of
machine rotation. Here is a question: what is the relationship between the voltage EA and the
field current of the machine?
When we studied transformers, we saw that when applying an electric current in a
winding, a magnetomotive force appeared. In
DC machines the same thing happens. So when we apply current to the field
winding, it produces a magnetomotive force (MMF)
given by eq. 102-03.
eq. 102-03
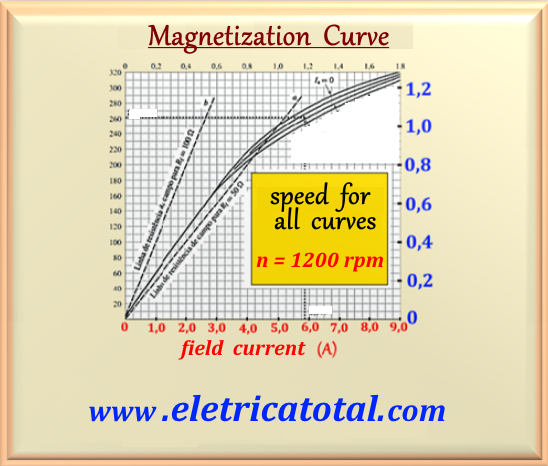
This magnetomotive force produces a magnetic flux in the machine according to the magnetization curve.
It is very practical to represent the magnetization curve in a graph EA x IF
for a given speed ωo,
since we know that the magnetizing current is directly proportional to the magnetomotive force and the voltage
EA, directly proportional to the magnetic flux. In Figure 102-08 we can see a
magnetization curve.
Figure 102-08
In order to obtain the maximum possible power per kilogram of a machine, most motors and generators
is designed to operate near the saturation point on the magnetization curve (i.e. knee of the curve). As
Consequently, often a large increment in field current is required to obtain a small
increase in EA when the operating point is close to full load.
As studied in item 3, the switching process, according to [26], is not as simple in practice as it seems in reality.
theory. Basically we have two problems: one is the armature reaction and the other is known as the voltages L di/dt.
Initially we will study the armature reaction.
5.1 Armature Reaction
We have seen that the poles of the DC machine produce the necessary magnetic field for the machine to operate as a motor or
as a generator. The rotor, in which the armature winding is housed, is under the influence of this field. If the machine does not have
rotation, we have no voltage induced in the armature winding. However, if the rotor begins to rotate, a
voltage induced in the armature winding and, as a consequence, we will have an electric current circulating through the winding
generating its own magnetic field. So now we have two magnetic fields that are going to interact with each other. A magnetic field
due to the field winding and the other due to the armature winding. This interaction between the two fields will distort
the original field provided by the machine poles. The greater the load connected to the motor or generator, the greater the distortion of the magnetic flux in the air gap.
This distortion in the machine flux is known as the armature reaction. This gives rise to two serious problems in
DC machines. The first is the so-called neutral plane displacement. The neutral magnetic plane, also known
as neutral magnetic, is defined as the plane inside the machine where the speed of the rotor conductors is
exactly parallel to the lines of magnetic flux, so that in this case the voltage induced in the conductors is zero, that is,
the result is given by εind = 0.
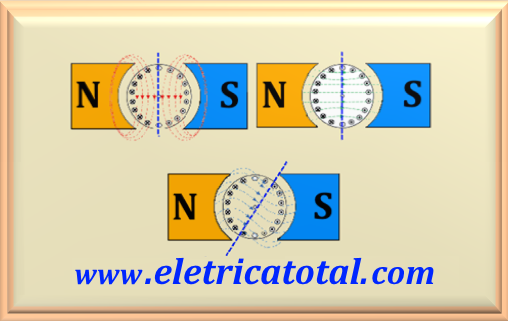
Figure 102-09
To better understand the magnetic flux distortion effect, let's look at Figure 102-09,
where in the first illustration only the armature winding flux appears, whose direction is
top to bottom. In the second illustration, only the flux of the field winding appears, whose direction and sense
it is from left to right. And in the third illustration
we see the interaction between the two flows showing the distortion that occurs in the resulting flow.
Considering the
magnetic field generated by the field winding a constant value, that is, being IF = cte, the direction and sense
of the magnetic flux will depend on the armature current IA. That is, if the load is small, then the distortion
of the flow is small. And by increasing the load, the flow distortion increases. Looking at the vector graphic on the right,
it is clear the variation of the angle θ as a function of the armature current IA. As a result of this
interaction between the fields, there was a displacement of the place where the induced voltage εind
in the conductor would be null.
So, in the case of a motor, the neutral magnetic plane is displaced in the direction of rotation of the rotor.
So the question is: what's the problem with shifting the neutral plane?
We know that the commutator must short the segments exactly when the voltage across them is zero. If the machine
operates without load, the neutral plane is vertical and therefore the voltage between the segments is really zero. However, at
if we add a load to the machine, the neutral plane is displaced and, in this case, the voltage between the segments is
different from zero. Thus, when the brushes short these segments there will be arcing and sparking on the brushes.
This creates a serious problem, as it leads to a reduction
of the useful life of the brushes, consequent corrosion of the commutator segments and, obviously, a high maintenance cost.
In addition to the problem reported above, we have a second problem caused by the armature reaction, which is the
magnetic flux weakening. This weakening is due to the subtraction between the flux supplied by the winding
field and the armature winding. Since most electrical machines operate with magnetic flux density
near the saturation point, at the locations on the pole surfaces where the magnetomotive force (fmm) of the rotor adds up
to the magnetomotive force of the poles, only a small increment of magnetic flux occurs. However, in the places of
pole surfaces where the magnetomotive force of the rotor is subtracted from the magnetomotive force of the poles, a large
decrease in magnetic flux. Thus, we can state that:
"The average total magnetic flux under the entire pole face is decreased."
This causes problems in both motors and generators. In generators, the consequence
is a reduction in generator output voltage for any given load. In engines, the case is more serious. We know that when
we decrease the flow, the motor speed increases. However, increasing the speed of a motor can increase its load,
resulting in further weakening of the flow, which in turn further increases the velocity, generating a chain reaction.
This can lead to an out-of-control situation, leading to a shutdown of the system's power supply.
of protection or the destruction of the engine.
Another important problem (according to Chapman, [26]) is the so-called voltage L di/dt that occurs in the segments of the commutator that are shorted by the brushes, sometimes called
inductive peak voltage. To understand this problem better, let's look at an example
assuming that the electric current circulating through the brush is of
order of 400 A. Therefore, the current in each path is 200 A. Thus, when a commutator segment is placed
shorted, the current in that segment must be reversed. The question is: how fast should this reversal occur?
Assuming the machine is running at 800 rpm and there are 50 segments on the commutator (a reasonable number), each segment
of the commutator moves under a brush and leaves it at t = 0.0015 s. So the rate of change of current
in relation to the shorted loop time must be on average
di/dt = 400 A / 0,0015 s = 266.667 A/s
Even considering a minimum inductance for the loop, the inductive effect generates a voltage peak (L di/dt) very
significant, causing through this high voltage induced the same sparking problems on the brushes as when
we study the problem of armature reaction, that is, displacement of the neutral plane.
Faced with the switching problems that DC machines face, three possible approaches were developed to
partially or totally correct armature reaction and L di/dt stresses. These are:
This was one of the first attempts to solve brush sparking. How did you know that when the machine
received a charge, its magnetic neutral would be displaced, so the obvious question is: why not displace the brushes until the sparking is suppressed? Initially it seems like a good idea, but it brings with it a series of problems related to this displacement.
One such problem is that if the charge changes, then the magnetic neutral changes as well. Therefore, we conclude that every time the charge varies
we must readjust the position of the brushes. But the displacement of the brushes brings another problem: the effect of the weakening of the magnetic flux caused by the armature reaction is aggravated. This is due to two factors:
In this case, the rotor magnetomotive force has a vector component that opposes the
magnetomotive force of the poles.
The change in armature current distribution causes the magnetic flux to concentrate even more on the
saturated parts of the polar faces.
Due to these problems, this method ceased to be used at the beginning of the 20th century.
Another idea for reducing or eliminating the problem of sparking was that of switching poles (according to Chapman, [26]).
Basically, the idea
consisted of canceling the voltage in the conductors that were in commutation, eliminating the problem of sparking. Then eat
insertion of small poles located midway between the main poles, these switching poles are positioned
just above the conductors passing through the switch. In this way, the process boils down to providing an exact magnetic flux
in such a way that the voltage induced in them by these poles annuls the voltage induced from the main poles. And so,
we eliminate the sparking problem.
The switching poles are so small that they affect only the few conductors that are
in the process of going through switching, not interfering in any way with the operation of the machine. Note that the
armature reaction under the face of main poles is not affected as the effects of switching poles
are small, restricted to the conductors of interest and, therefore, do not interfere with the weakening of the magnetic flux of the machine.
But the important question is: how to achieve voltage cancellation in the switch segments for all
load values? The answer is simple. Make a series connection of the interpole windings with the windings
of the armature.
Thus, as the rotor load and armature current increase, the displacement of the neutral plane and the effects
L di/dt also grow. These effects add up to an increase in the induced voltage on the conductors.
that are commuting. But, the magnetic flux from the interpole also increases as it is connected in series with
the armature. If the armature current increases, the interpole flux increases. The end result is that there is a cancellation of
effects over a wide range of load values.
It should be noted that the interpoles work correctly, whether the machine is working as a engine or as a generator.
This is due to the fact that when the machine changes operation from motor to generator, there is an inversion in the direction of the current of the
interpoles. But it turns out that the armature current is also reversed. With this, the effect of the inversion of the interpoles is neutralized.
Therefore, we maintain the perfect functioning of the machine, either as an engine or as a generator.
What polarity should the magnetic flux in the interpoles be?
Note that on conductors that are commuting, the interpoles must induce a voltage opposite to the voltage caused by the
displacement of the neutral plane and by the effects L di/dt. In the case of a generator, the plan
neutral moves in the direction of rotation. This means that the commuting conductors
have the same voltage polarity as the previous pole that has just fallen behind.
To oppose this voltage, the interpoles must have opposite flux,
that is, the flux of the next pole. In an engine, however, the neutral plane moves in the opposite direction of rotation. In this way, the
conductors that are commuting
have the same flux as the pole they are approaching. To oppose this
voltage, the interpoles must have the same polarity as the previous main pole that
is moving away and falling behind. So, we can conclude that:
In a generator, the interpoles must have the same polarity as the main pole
coming next.
In a motor, the interpoles must have the same polarity as the main pole
previous that moves away.
Therefore, due to its low cost and simplicity in its implementation, switching poles or interpoles have become
very common in DC machines, especially in machines with a power of 1 HP or more. It should be noted that the use of
interpoles does not change the magnetic flux distribution under the polar faces. So, the weakening of the magnetic flux
remains present and we can only live with its effects.
In the case of motors that must operate with very large loads, the problem of flux weakening reaches proportions
quite serious [26]. In order to completely cancel the armature reaction, thus simultaneously eliminating the
weakening of the flux and displacement of the neutral plane, a different approach was developed. This third technique
consists of adding the so-called compensation winding. This winding is housed in open grooves on the faces of the
poles, parallel to the armature conductors in the rotor, thus canceling the distortion effect caused by the armature reaction.
These windings are connected in series with the armature winding. Then, changing the mechanical load on the axis of the
motor, changes in the compensation winding current will occur, eliminating the effects mentioned above. It is possible,
since the magnetomotive force due to the compensating windings is equal and opposite to the magnetomotive force due to the armature
at each point below the poles of the faces. The net magnetomotive force is exactly the magnetomotive force due to
poles. In this way, the flux in the machine remains unaffected, regardless of the load the machine is subjected to.
One of the main disadvantages of using compensation windings is their high cost, because they must be built
on the faces of the poles. It should be noted that any engine that uses them will also need interpoles, as the
compensation windings do not cancel L di/dt effects. On the other hand, the interpoles need not be as
robust, because now they cancel only the L di/dt effects on the windings, and not the voltages due to the displacement of the plane
neutral.
In real DC machines, there are several ways to connect the turns of the armature (which is mounted inside the rotor)
to the switch segments. These different connections affect the number of paths
current parallels inside the rotor, the output voltage of the
armature, the number and position of the brushes with the commutator segments.In real DC machines, there are several ways to connect the turns of the armature (which is mounted inside the rotor)
to the switch segments. These different connections affect the number of paths
current parallels inside the rotor, the output voltage of the
armature, the number and position of the brushes with the commutator segments.
The armature winding consists of several turns of conducting wire wound on a die forming a coil.
The conductor, in general, is a wire with a diameter suitable for the maximum armature current and insulated by one or several layers of varnish, or some kind of insulating enamel. Thus, all the turns are isolated from each other. And to isolate the armature coil from the iron that makes up the rotor, an insulating material such as cardboard, of suitable thickness and shape, is introduced into the grooves, or it can also be used materials such as PVC. For motors with high power and operating voltage, the coils are insulated with protective tape that provide good electrical insulation, as well as the corona effect.
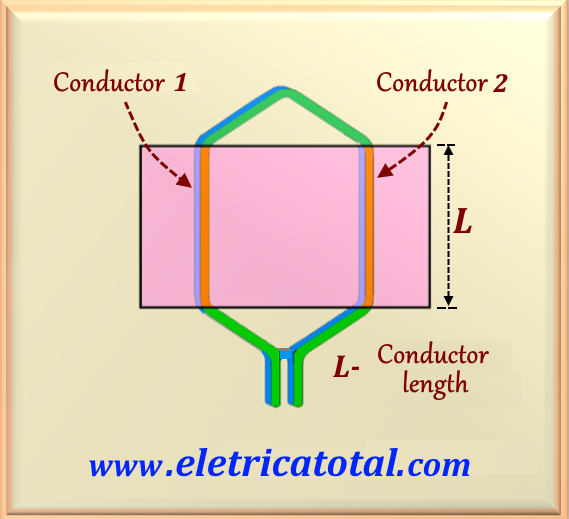
We call each side of the loop that forms the armature coil a conductor. So, to determine the number of
armature winding conductors we use the equation eq. 102-04.
eq. 102-04
Where the variables are:
Z - number of rotor conductors
C - number of rotor coils
Na number of turns in each rotor coil
Notice the number 2 in eq. 102-04. This is due to the fact that each loop has 2 conductors, as we can see
see in Figure 102-10.
Figure 102-10
Normally one coil covers 180° electrical. Thus, when one side of the coil is under the center of a given pole
the other side of the coil must be under the center of a pole that has the opposite polarity to the first.
Remember that on a DC machine, if the coil passes under a north pole, the next pole has to be a
pole south. And so, there is an alternation of polarity between the poles. This explains why there must be
an even number of poles in a machine.
The relationship between the electrical angle and the mechanical angle in a given machine is given by eq. 102-05.
eq. 102-05
Where the variables are:
θe - electrical angle, in degrees.
θm - mechanical angle, in degrees.
P - number of magnetic poles of the machine.
If a coil spans 180 electrical degrees, at all times the voltages across
conductors on both sides of the coil will have the same magnitude, but with
opposite directions. Such a coil is called a full pitch coil.
It is possible to build a coil spanning an angle less than 180°
electrical. Such a coil is called a shortened or fractional pitch coil and a
rotor winding with shortened pitch coils is called winding
shortened. The degree of shortening of a winding is described by a factor of
step p, which is defined by eq. 102-06.
eq. 102-06
On some machines a small amount of shorting is used on the armature windings.
to improve commuting.
Most rotor windings are double-layer windings, meaning that sides of
two different coils are inserted into each of the slots.
One side of each coil will be at the bottom of a slot and the other side will be at the top.
from another slot. Such a construction requires that the individual coils be housed in the
rotor grooves according to a very elaborate procedure. One side of each coil is
placed at the bottom of your groove and, after all the undersides are in place,
the other side of each coil is placed on top
of your slot. In this way, all windings are intertwined, increasing the
mechanical strength and uniformity of the final structure.
When all windings (coils) are installed in the rotor slots, they must be
connected to the commutator segments. There are several ways to make these connections.
and the different winding configurations that can result present different
advantages and disadvantages.
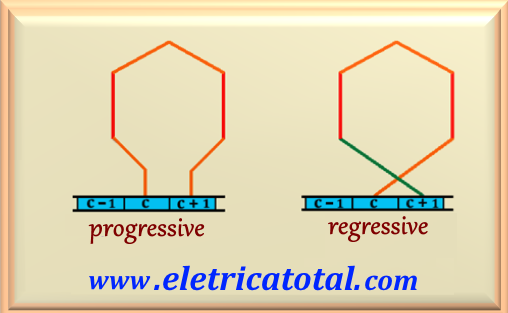
The distance (in number of segments) between the switch segments to the
which the two sides of a coil are connected is called commutator pitch, which we will denote by
yc. If the end side of a coil (or a certain number of coils in the construction
wavy line) is connected to a switch segment that is ahead of the segment
to which the leading side is connected, then the winding will be called progressive winding.
If the end side of a coil is connected to
a segment of the switch that is behind the segment to which the side is connected
initial winding will be called backward winding (see Figure 102-11).
"If everything else is identical, the direction of rotation of a progressive-wound rotor will be opposite
to the direction of rotation of a regressive winding rotor."
Figure 102-11
Rotor (armature) windings can also be classified according to
multiplicity of its windings. A simple (or simplex) rotor winding
It consists of a single winding, complete and closed, mounted on the rotor. One
double (or duplex) rotor winding is made up of two complete assemblies
and independent of windings.
Collectively, it is said that
all armatures with more than one set of windings have windings
multiple (or multiplex).
Finally, armature windings are classified according to the
sequence of their connections to the switch segments. There are two sequences
basic armature winding connections – lap windings and wavy windings.
The simplest type of winding construction used in modern DC machines is the winding.
imbricated or in
simple series (or simplex). Also know as Lap winding, is a rotor winding consisting of coils containing one or
more turns of wire with both sides of each coil connected to adjacent commutator segments
(Figure 102-11).
If the end side of the coil is connected to the segment
that follows the segment to which the leading side of the coil is connected, then if
this is a progressive lapped winding and yc = 1. If the end side of the coil
is connected to the segment that precedes the segment to which the
initial side of the coil, then it is a regressive lapped winding and
yc = -1. An interesting characteristic of simple lap windings is:
"There are as many parallel current paths through the machine as there are poles in that machine.
machine."
If C is the number of coils and commutator segments present
on the rotor and P is the number of poles on the machine, then there will be C/P coils on each
of the P parallel current paths passing through the machine. The fact that there is P
current paths also require that there be as many brushes on the machine as
are the number of poles to be able to connect all current paths.
The fact that there are many current paths in a pole machine
multiple makes lap winding an ideal choice for tension machines
rather low and high current, because the high currents required can be split between the different current paths.
This current division allows
the size of the individual rotor conductors remains reasonable even when the
total current becomes extremely high.
If a lap winding is double (or duplex), there will be two sets of
completely independent windings housed in the rotor and every second commutator segment will be connected to one of the sets.
Therefore, a coil
individual ends on the second segment of the commutator after the segment where it was
initially connected and yc = ± 2 (depending on whether the winding is progressive or
regressive). Since each set of windings has so many current paths
as to the number of poles in the machine, then in a double lap winding there will be the
twice as many current paths as the number of poles in the machine.
In general, in a lap winding of multiplicity m, the step of the switch yc is given by
eq. 102-07:
eq. 102-07
And the number of current paths in the machine is given by eq. 102-08
Wave or series winding is an alternative way to connect the coils
from the rotor to the commutator segments. In single wave winding every second coil of the
rotor terminates with a connection to a commutator segment which is
adjacent to the segment connected to the beginning of the first coil. Therefore, between segments
adjacent to the commutator, there are two coils in series. Furthermore, as each pair of
coils between adjacent segments have one side under each polar face, all
the output voltages will be the sum of the effects of all poles, and cannot occur
voltage imbalances.
The termination of the second coil can be connected to the segment that is after
or before the segment on which the first coil starts. If the second coil is connected to the
segment after the first coil, the winding will be progressive
or, if it is connected to the segment before the first coil, the winding will be
regressive, as shown in Figure 102-11 (above).
In general, if there are P poles on the machine, there will be P/2 coils in series between
adjacent segments of the switch. If coil number P/2 is connected to segment
posterior to the first coil, the winding will be progressive and, if connected
to the segment before the first coil, the winding will be regressive.
In a single wave winding, there are only two current paths.
There are C/2 or half of the windings in each current path. The brushes of this
machine will be separated from each other by a full polar pitch.
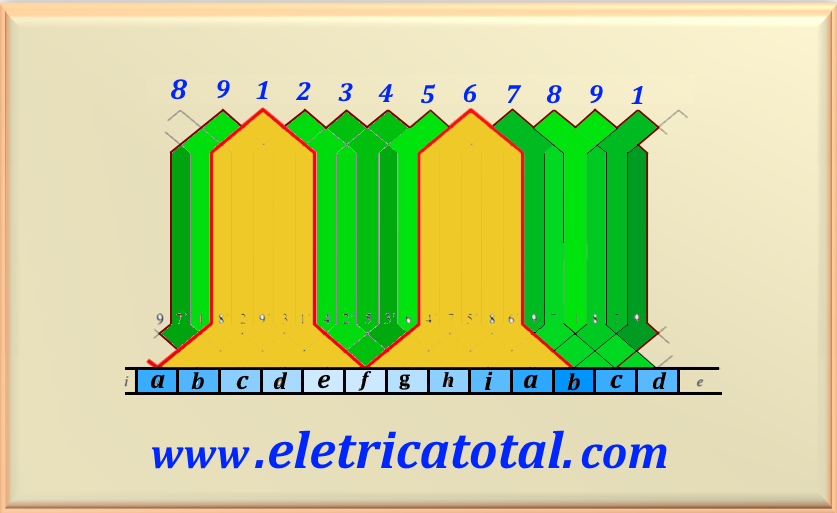
What is the commutator pitch for a wave winding?Figure 102-12 shows a winding
nine-reel progressive. The end of a coil occurs five
segments beyond your starting point. In a regressive wave winding, the
the end of the coil occurs four segments before its starting point. So the end
of a coil in a four-pole wave winding must be connected just before or after the midway point on the
circle from your starting point.
The general expression giving the commutator pitch for any winding
simple wavy ( or simplex) is:
eq. 102-09
Where the variables are:
C - is the number of coils in the rotor.
P - is the number of poles on the machine.
Figure 102-12
Since there are only two current paths through a single wave-wound rotor, there are only two
brushes to collect current.
This is because the segments undergoing commutator connect the dots
of the same voltage under all polar faces. If desired, more brushes can be added at points further away from
180 electrical degrees because they are in the
same potential and are connected to each other by the wires that undergo commutation in the
machine. Extra brushes are usually added to a wave winding machine, even if this is not necessary,
because they reduce the amount
of current to be collected by a given set of brushes
For a multiplex wave winding the equation that determines the number of possible paths for the electric current
is given by eq. 102-10.
eq. 102-10
Wave windings are well suited to building higher voltage DC machines because the coils in series between the
commutator segments allow high voltage to be produced more easily than with lap windings.
Another advantage of wave winding is the fact that it only needs two sets of brushes, which can be placed in the
top of the switch, which facilitates inspection and maintenance. This is one of the reasons why wave winding became
universally used in engines intended for electric traction.
In a DC machine the commutator is made of bars of
copper insulated with mica-based material. Copper bars are made thick enough to allow for natural wear and tear
throughout the service life of the engine.
The mica insulation between the commutator segments is harder than the material
of the commutator itself. In this way, after a long time of using a machine,
It is often necessary to trim the commutator insulation to ensure that it
do not protrude over the copper bars.
Machine brushes are made of carbon, graphite, metal alloys and graphite or
a mixture of graphite and metal. They feature high conductivity to reduce electrical losses and a low coefficient of
friction to reduce excessive wear.
They are deliberately made of a much softer material than the commutator segments, so that the
commutator surface suffers very little wear. Choosing the hardness of the brushes is a compromise: if the brushes are soft
too much, they
must be replaced frequently, but if they are too hard, the surface of the
commutator will experience too much wear over the life of the machine.
All wear that occurs on the surface of the commutator is a direct result of the
fact that brushes must rub this surface to convert AC voltage
of the rotor conductors in DC voltage at the machine terminals. If the pressure of
brushes is too much, both the brushes and the commutator bars will wear excessively. However, if the pressure is
too low, the brushes will tend to
jump slightly and a large amount of sparking will occur at the contact surface between
brushes and commutator segments. This flash is equally harmful
for the brushes and commutator surface. Therefore, the pressure of the brushes on the
commutator surface must be carefully fitted for maximum service life.
Figure 102-13
In Figure 102-13 we see a photograph of an engine with its various elements, emphasizing the tap changer position and the
brushes seated on it.
In item 4 we saw that the voltage generated by the armature winding is given by eq. 102-02. Let's remember it:
eq. 102-02
In any real dc machine the induced voltage depends on three factors:
1 - the Φ magnetic flux of the machine.
2 - the ω speed of the machine rotor.
3 - a constant that depends on the construction of the machine.
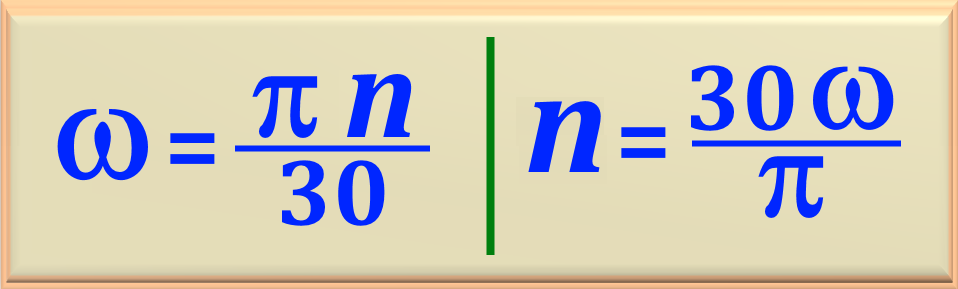
This is exactly what the eq. 102-02 tells us. It should be noted that in this equation the rotor speed is expressed in
rad/s. However, in modern industry the rotor speed is expressed in rpm. Therefore, when the machine speed is
given in rpm, we can develop a new equation that will allow us to use rpm directly. For this, we will show the
equation that allows you to transform rpm into rad/s.
eq. 102-11
On the other hand, the definition of the constant K is given by the equation below.
eq. 102-12
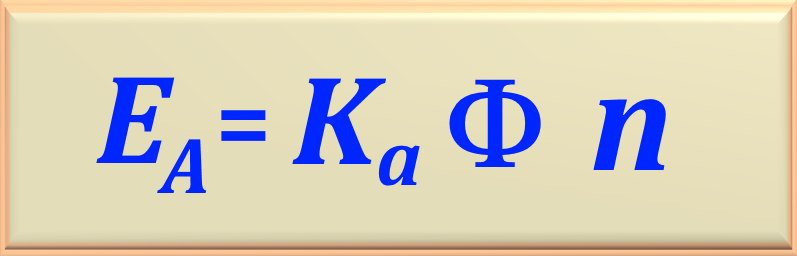
Therefore, replacing the equations eq. 102-11 and the eq. 102-12 in eq.102-02, we get:
eq. 102-13
Where the value of the new constant Ka is given by eq. 102-14.
eq. 102-14
Therefore, to find the induced voltage EA when using the machine speed in rpm,
we must use the eq. 102-14 to calculate the construction constant of the machine and the eq. 102-13 to calculate the voltage induced EA.