The study of the behavior of an RLC circuit when its components are connected in series involves the interaction between
resistance (R), inductance (L) and capacitance (C). In that case, the
The natural response of the circuit can be described by a second order differential equation. The solution
This equation reveals the characteristics of the transient regime of the circuit, such as the resonance frequency
and damping. Analyzing these factors is important to understand how the circuit responds to different
initial conditions and external energy sources. Methods for determining your natural response are
similar to what we used in the case of the parallel RLC circuit.
Observation - To study this chapter it is essential to have a good knowledge of differential equations of 1st and 2nd order.
When we study differential equations we learn that there are two possible answers: one called
natural or homogeneous; the other call forced or non-homogeneous. Let's start by studying the simplest form, that is, the natural or homogeneous response.
2.1 Series RLC Circuit Natural Response
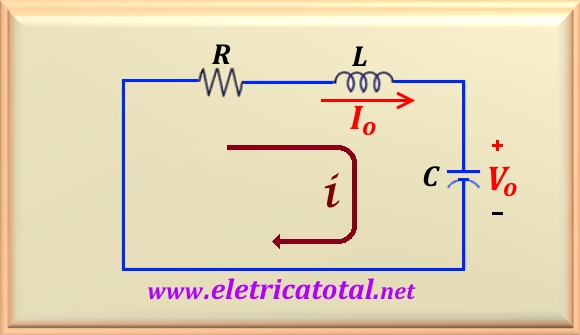
For this we consider a RLC circuit with all its elements connected in series, as illustrated in the Figure 25-01.
Figure 25-01
To analyze the circuit let's assume that both the capacitor and the inductor can have a stored initial energy,
either an inductor current or a capacitor voltage, both with nonzero initial values. In the circuit above, these initial
conditions are represented as follows:
i (0+) = Io e v(0+) = Vo
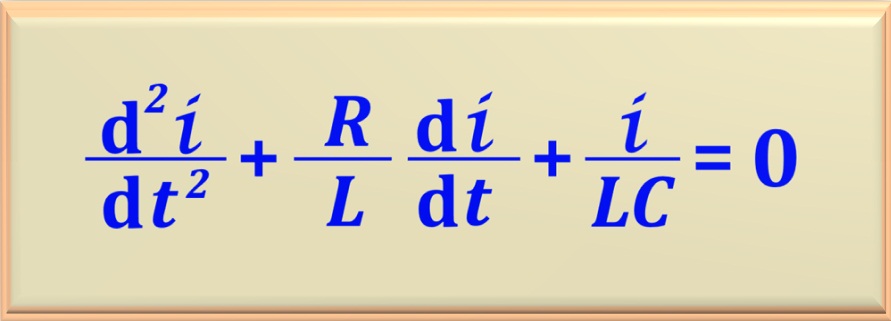
Applying the concepts of differential equation to the circuit, we get a second order linear homogeneous differential equation, as shown in the equation below.
eq. 25-01
Now, from the above equation we can determine the so-called characteristic equation of the equation differential,
as we can see in the equation below.
r 2 + (R / L) r + 1 / LC = 0
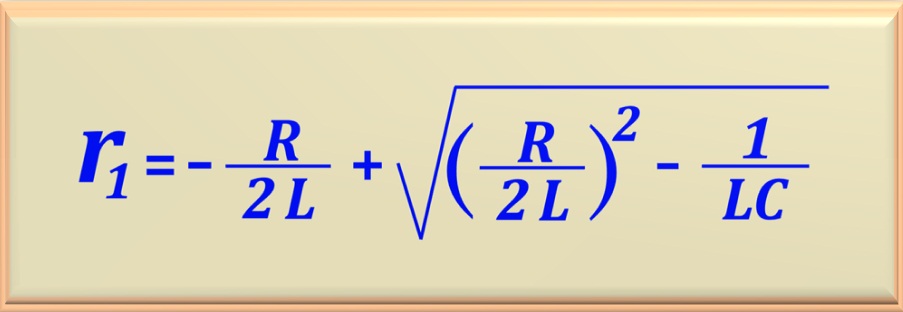
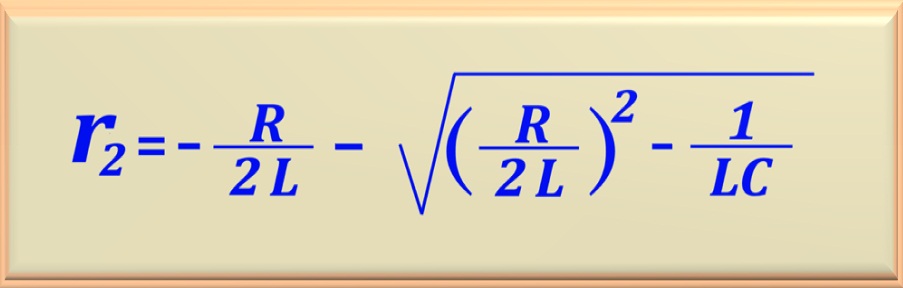
The solution obtained for i (t) depends on the roots of this second degree equation. So the two roots are:
eq. 25-02
eq. 25-03
Now that we have the root values of the equation, we can write the solution of the differential equation. This is given by:
eq. 25-04
Note that the roots of the characteristic equation (r1 and r2) are determined by the
circuit parameters, R, L and C. The values of the constants
A1 and A2 are determined by the initial conditions of the problem. Thus we can say that
the general solution of eq. 25-01 has the shape of eq. 25-04.
Therefore, to find the solution to the problem, we must find the roots of the characteristic equation as a first step, since
the behavior of i (t) depends on the values of these roots. Note that the first part is the circuit response due to
the first root, r1. The second part is the circuit response due to the second root, r2. We can call them a solution i1 and i2, respectively. If i1 and i2 they are solutions, so we know that their sum is also a solution. That is what you are saying to eq. 25-04.
As with the parallel RLC circuit, here we also define two new parameters to rewrite the equations of the two roots more succinctly. The first parameter, called the Neper Frequency or
coefficient or damping factor, is represented by
greek letter alfa, α. The second parameter,
called the resonant angular frequency or undamped resonant frequency,
is represented by the greek letter, ωo.
So we can write them as:
eq. 25-05
eq. 25-06
Note that the alpha parameter of the RLC series circuit differs from that of the RLC parallel circuit. However, the other parameter is exactly the same. So let's write the root equations as a function of these two new parameters, or:
eq. 25-07
eq. 25-08
Making an analogy with what was studied in high school equations in high school, here we also realize that there are three
possible outcomes for radicating.
Positive - when α > ωo
Zero - when α = ωo
Negative - when α < ωo
These three possibilities give rise to three different types of circuit response. And each response type is given a name
that identifies it. So let's take a closer look at each case.
This answer is obtained when α > ωo. We can summarize the procedure required to determine the response of an overdamped circuit
of a serial RLC circuit, which is perfectly described by eq. 25-04.
1 - Find the roots of the characteristic equation, r1 and r2,
from the values of R, L and C.
2 - To determine i(0+) and di(0+) using the circuit
analysis methods previously studied.
3 - Calculate the values of A1 and A2 solving the system of
equations consisting of the equations below.
i(0+) = I0 = A1 + A2
di (0+) / dt = Vo / L =
r1 A1 + r2 A2
4 - Override the values of r1, r2,
A1 and A2 getting the expression of i(t) to t ≥ 0.
This answer happens when α = ωo, and therefore the roots of the characteristic equation are real and EQUAL. This is the situation where the final state is reached as quickly as possible without oscillation in the system. In this case, the roots of the characteristic equation are:
eq. 25-09
From what has been studied in the discipline differential equations, we know that when the roots of the characteristic equation are equal we cannot express the solution in terms of eq. 25-04. Then the solution must take the form of a sum of two terms: the first term is a simple exponential and the second term is the product of the independent variable by an exponential. Then the system response is given by the equation eq. 25-10 below.
eq. 25-10
To determine the values of B1 and B2, we use the same method as the previous item. Thus, we have the relations:
i(0+) = I0 = B1
di(0+) / dt = Vo / L =
B2 - α B1
With the value of α given by eq. 25-08 and with the values of B1and B2, we can replace them in eq. 25-09 and find the equation solution of the circuit.
When α < ωo, the roots of the characteristic equation are complex. So we say the circuit response is underdamped. Based on eq. 25-06 and eq. 25-07, let's rewrite them more conveniently by making the following change:
eq. 25-11
Remembering that we can write j = √-1, so we can rewrite eq. 25-10 as:
eq. 25-12
Note that we have redefined radicating by a new parameter called damped angular frequency,
ωd, according to eq. 25-12 below.
eq. 25-13
Thus we can write the response of an undamped series RLC circuit. The equation below is the result of some transformations and use of some properties of complex numbers.
eq. 25-14
The constants B1 and B2 are real numbers. These coefficients are
determined as we did for the other two cases. We calculate i(0+) and
your first derivative for t = 0+. In short we have
i(0+) = I0 = B1
di(0+) / dt = Vo / L =
- α B1 + ωd B2
By eq. 25-13 we realize that the response is oscillatory due to trigonometric terms, that is, the voltage varies between positive and negative values. How often these oscillations occur depends on
of the value of ωd. On the other hand, due to the presence of the exponential function, the amplitude of the oscillations decreases over time. How fast the amplitude of oscillations decreases it depends on α. For this reason the α parameter is called the
damping factor or damping coefficient. This also explains why the parameter
ωd is called damped angular frequency.
It should be noted that in the absence of damping , we have α = 0 . This means that we have no dissipative elements in the circuit, or in other words, R = 0 . In this situation, the circuit has a smooth oscillatory response and the frequency of the oscillations
it's ωo. In the presence of dissipative element, R in the circuit,
α ≠ 0 and as a consequence, ωd < ωo.
Then, when α is different from zero , we say that the oscillation frequency is
damped.
It should be noted that all the calculations performed in the previous item, the circuit had no type of power source. Now let's study the behavior of the circuit when it contains power sources.
To obtain the response of a RLC series circuit to a step function, we must first determine the natural response equation. After that, we can determine the voltage between the terminals of any of the elements, since the differential equation describing the capacitor voltage behavior has the same form as the differential equation describing the inductor current behavior
The method used for the parallel RLC circuit can be applied to the case of the
serial RLC circuit.
The solution of the second-order differential equation, with a forcing function in the second member, is equal to the sum of the natural response with the forced response. Thus, for the step function that has a constant value, the solution can be written as:
eq. 25-15
This is for the current case. In the case of voltage, the format is the same. So:
eq. 25-16
Where If and Vf represent the final value of the current and voltage in the response function.