16. - Determinação dos Parâmetros de um M. I.Haga clic aquí!
En el capítulo anterior vimos que los motores síncronos tienen una aplicación muy limitada en la industria, principalmente porque no tienen la capacidad de arrancar sin alguna ayuda. Para llenar este vacío, surgió el llamado motor de inducción, también conocido como máquina asíncrona, ya que, a diferencia del motor síncrono, no tiene la capacidad de girar a una velocidad síncrona con la frecuencia de la red de suministro. Y se llaman inducción porque el voltaje en el rotor es
inducida en los devanados del rotor sin necesidad de una corriente de campo CC para hacer funcionar la máquina.
Además, el motor de inducción tiene la capacidad de arrancar sin ayuda externa. La máquina asíncrona también puede funcionar como generador. Sin embargo, tiene muchas desventajas y su uso está restringido a aplicaciones especiales. En este capítulo, la atención se centra en el
motor de inducción trifásico.
Físicamente, el estator de un motor de inducción es similar al de una máquina síncrona. Básicamente hay
dos tipos diferentes de rotores de motor de inducción que se pueden colocar
dentro del estator. Son ellos:
1 - Rotor de jaula de ardilla
2 - Rotor bobinado
El rotor tipo jaula de ardilla consiste en una serie de barras conductoras que se encajan en el interior
de ranuras en la superficie del rotor y cortocircuitado en ambos extremos por grandes anillos de cortocircuito. Esta forma constructiva se conoce como rotor de
jaula de ardilla porque, si se examinaran los conductores aisladamente, serían similares a esas ruedas sobre las que corren las ardillas o los hámsteres para hacer ejercicio.
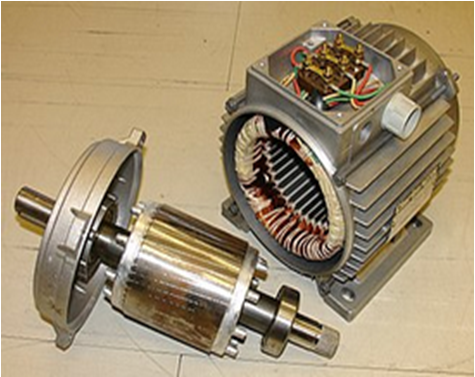
En la parte inferior de la foto que se muestra en la Figura 107-01, puede ver el rotor tipo jaula de ardilla. En la parte superior tenemos el estator y su devanado. En la parte superior del cuerpo tenemos los terminales de conexión del motor a la fuente de alimentación.
Figura 107-01
A su vez, el rotor de tipo bobinado tiene un conjunto
completo de devanados trifásicos que son similares a los devanados del estator. Las tres fases de los devanados del rotor
suelen estar enlazados en estrella y sus tres
terminaciones están conectadas a anillos deslizantes en el eje del rotor. Los devanados de
se accede al rotor a través de escobillas que descansan sobre los anillos
deslizadores. Para obtener el efecto de inducción, los devanados del rotor se cortocircuitan entre sí.
Sin embargo, el cortocircuito de los devanados no se realiza directamente sobre el rotor devanado, sino a través de las escobillas, externamente.
Por lo tanto, en los motores de inducción de rotor bobinado, es posible realizar modificaciones como, por ejemplo, insertar externamente
resistencias extra en el circuito del rotor, a través de escobillas. Así, es posible tomar
aprovechar estos atributos para modificar la característica par xvelocidad del motor.
Estas resistencias, introducidas mediante escobillas, son en realidad reóstatos (resistencias que pueden variar su valor
manualmente) que puede asumir desde un valor máximo hasta un valor mínimo para limitar la corriente de arranque del motor.
Así, el motor se pone en marcha con el reóstato en su valor máximo para obtener una pequeña corriente de arranque. Después del
arranque del motor, reduzca gradualmente el valor del reóstato hasta que el motor alcance la velocidad nominal. Es importante el correcto
dimensionamiento de este reóstato porque además de servir para arrancar el motor, también es posible usarlo para
control de la velocidad y par del motor en su funcionamiento normal.
Los motores de inducción de rotor bobinado son más caros que los motores de inducción de jaula de ardilla. Requieren mucho más mantenimiento debido al
desgaste asociado con sus escobillas y anillos colectores. Como resultado, los motores
de inducción de rotor bobinado se utiliza en casos especiales.
Figura 107-02
En la Figura 107-02 vemos un rotor devanado con los tres anillos deslizantes y las tres escobillas.
Cabe señalar que el estator de las máquinas asíncronas se construye utilizando láminas de acero de silicio apiladas
para reducir las pérdidas por corrientes de Foucault e histéresis magnética. Y el material del rotor es de alta permeabilidad magnética, por lo que es posible crear un campo magnético alto con pequeñas fuerzas electromotrices inducidas.
El rotor de la máquina de inducción normalmente está montado dentro del estator de forma concéntrica, utilizando un sistema
de rodamientos para soportar la estructura mecánica de la máquina.
Entre el rotor y el estator existe un espacio de aire denominado air gap o gap, donde tiene lugar la conversión de energía electromecánica.
Cuando el devanado del estator es alimentado por una fuente
AC trifásica, aparece un campo magnético giratorio en los devanados, BS,
que cruza el entrehierro y el rotor, induciendo voltaje en el rotor (tipo
bobinado) o en conductores cortocircuitados (jaula de ardilla), provocando la
energización del rotor solo por inducción. Si el devanado del
rotor se pone en cortocircuito, formando un circuito cerrado, circularán corrientes inducidas que producirán un campo
magnético en el rotor, BR, en oposición al campo del estator, resultando en producción de par y
giro del rotor a una velocidad determinada.
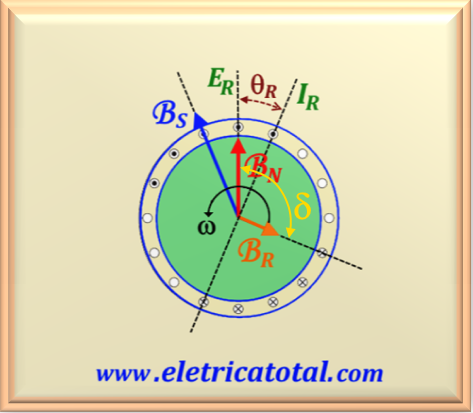
Figura 107-03
En la Figura 107-03 vemos un diagrama que muestra el campo giratorio del estator, BS.
Si te interesa saber cómo se produce este campo giratorio por las tres fases de la red eléctrica, puedes acceder a:
Este campo induce un voltaje en las barras del rotor, que a su vez produce un flujo de corriente en el rotor, que retrasa el voltaje en un ángulo θR, debido a la inductancia del rotor. Y esta corriente, IR, produce un campo de inducción magnética giratorio BR que está retrasada 90° con respecto a la corriente. Estos dos campos producidos interactúan entre sí resultando en un campo resultante, BN, que será responsable de la aparición de un torque en el sentido contrario a las agujas del reloj, lo que hace que la máquina acelere en la dirección del torque.
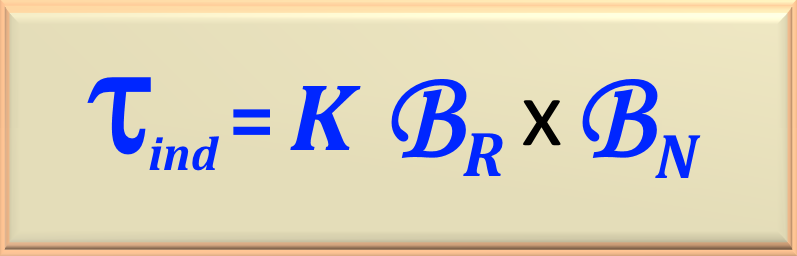
De esta forma, podemos establecer la ecuación del torque inducido en la máquina a través de la eq. 107-01, o:
eq. 107-01
Donde las variables involucradas son:
τind - Torque o conjugado inducido en la máquina;
K - Constante constructiva de máquina;
BR - Campo magnético de inducción del rotor;
BN - Campo de inducción magnético neto resultante.
Es posible escribir esta ecuación en su forma escalar a través de eq. 107-1a .
eq. 107-1a
Cuando el motor funciona sin carga, el campo magnético del rotor es muy pequeño, el par inducido también es muy pequeño,
lo suficientemente grande como para superar las pérdidas rotacionales del motor. En este caso, dado que el estator es lo
que proporciona la mayor parte del campo magnético neto resultante, BN, entonces la corriente
del estator I1 es bastante alto, incluso vacío, ya que debería proporcionar la mayor parte de
BN . Esta es la razón por la cual los motores de inducción tienen grandes corrientes
sin carga en comparación con otros tipos de máquinas. La corriente sin carga de un motor de inducción suele
ser 30 % a 60 % de la corriente a plena carga.
Por otro lado, de la Figura 107-03 vemos que δ = θR + 90°. Así, teniendo esto
en cuenta es posible escribir sen δ = sen (θR + 90°) = cos θR. Este término
es el factor de potencia del rotor.
Observación
"En este punto, es importante darse cuenta de que el motor de inducción nunca puede alcanzar la velocidad sincrónica. Si eso sucediera, las barras del rotor estarían estacionarias con respecto al campo del estator, BS. En este caso no habría tensión inducida en las barras. En consecuencia, el motor perdería velocidad debido a la fricción y otras pérdidas de la máquina, hasta detenerse.
Con esto concluimos que un motor de inducción debe siempre girar a una velocidad inferior a la velocidad síncrona."
Entonces podemos decir que cuando un motor de inducción funciona normalmente, tanto el campo del rotor BR como el campo del estator BS, giran juntos a velocidad síncrona, pero el rotor gira a una velocidad menor.
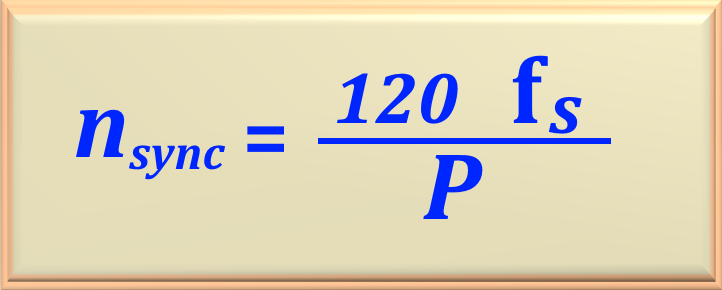
Debemos aclarar que la velocidad sincrónica establecida por el campo de inducción magnética BS, depende del número de polos de la máquina. Por lo tanto, la velocidad sincrónica de la máquina se puede calcular mediante eq. 107-02.
eq. 107-02
Donde las variables involucradas son:
nsync - velocidad sincrónica del campo de inducción magnética BS;
fS - frecuencia en Hz del sistema de alimentación de la máquina;
P - número de polos de la máquina.
A partir de esta ecuación, podemos crear una tabla que muestre la relación entre el número de polos de una máquina y
su velocidad de rotación para las dos frecuencias principales en redes trifásicas.
El voltaje inducido en las barras del rotor de un motor de inducción depende de la velocidad
del rotor en relación con los campos magnéticos. Por lo tanto, dos términos se utilizan comúnmente para definir el movimiento
en relación con el rotor y los campos magnéticos. Una es la velocidad de deslizamiento, nesc, definida como la diferencia entre la velocidad sincrónica, nsync y la velocidad del rotor, nr, o:
eq. 107-03
El otro término utilizado para describir el movimiento relativo es deslizamiento, generalmente representado por s, que es la velocidad relativa expresada por unidad o porcentaje. Es decir, el deslizamiento se define como
eq. 107-04
Tenga en cuenta que de eq. 107-03 podemos aislar nr en función del deslizamiento y la velocidad síncrona, obteniendo:
eq. 107-05
Cabe señalar que podemos obtener los mismos resultados cuando reemplazamos la letra n en las ecuaciones anteriores con la letra griega ω, donde ω corresponde a la velocidad angular dada en rad/s.
Tenga en cuenta que si el rotor gira a velocidad síncrona, entonces s = 0, en el paso
que, si el rotor está estacionario, entonces s = 1. Por lo tanto, las velocidades normales de un
motor están entre estos dos límites.
En un motor de inducción, cuando se aplica tensión a los devanados del estator,
se induce un voltaje en los devanados del rotor de la máquina. En general,
cuanto mayor sea el movimiento relativo entre los campos magnéticos del rotor y del estator, mayor será la tensión y la frecuencia del rotor.
El máximo movimiento relativo ocurre
cuando el rotor se detiene. Esta condición se llama rotor bloqueado,
de modo que el voltaje del rotor más alto y la frecuencia más alta se induzcan con el rotor
en esta condición.
El voltaje más bajo (0 V) y la frecuencia más baja (0 Hz) ocurren cuando
el rotor se mueve con la misma velocidad que el campo magnético del estator,
dando como resultado un movimiento relativo cero. El valor y la frecuencia del voltaje inducido en el
rotor para cualquier velocidad entre estos extremos es directamente proporcional a el
deslizamiento del rotor. Denominándose la tensión inducida en el rotor, cuando éste se encuentra bloqueado, por
EA0, podemos determinar el voltaje inducido en el rotor para cualquier deslizamiento, dado por
eq. 107-06.
eq. 107-06
Siguiendo la misma línea de razonamiento, podemos decir que la frecuencia de la tensión inducida en el rotor
para cualquier deslizamiento vendrá dada por eq. 107-07.
eq. 107-07
Evidentemente el rotor tiene un cierto valor de resistencia y reactancia. Llamando a la resistencia del rotor RR,
podemos suponer que tiene un valor constante y es independiente del deslizamiento. A su vez, la reactancia del rotor depende más
complejamente del deslizamiento.
Considerando la inductancia del rotor, representada por LR, sabemos que la reactancia depende de esta
inductancia y de la frecuencia del rotor. Entonces, podemos escribir la eq. 107-08, donde representamos la reactancia
del rotor como XR.
eq. 107-08
Considerando la eq. 107-07, tenemos:
eq. 107-09
Sabemos que cuando el rotor está bloqueado tenemos s = 1. Por lo tanto, podemos definir la reactancia del
rotor bloqueado por XR0 y viene dado por eq. 107-10.
eq. 107-10
Por lo tanto, uniendo eq. 107-09 y la eq. 107-10, obtengamos la eq. 107-11 que explica el valor de
XR en función de XR0 y s, es decir:
eq. 107-11
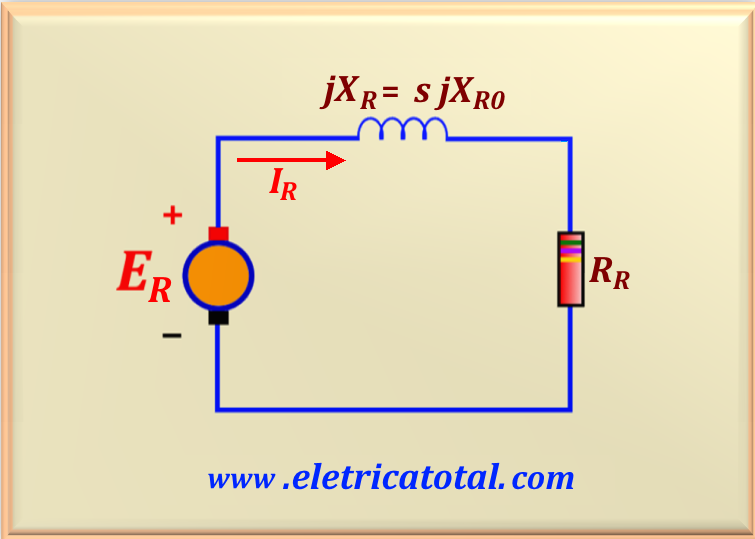
Después de presentar estas definiciones, podemos presentar el modelo eléctrico del circuito del rotor como se
muestra en la Figura 107-04.
Figura 107-04
Basándonos en el modelo eléctrico podemos determinar la corriente IR que fluye en el rotor. Entonces:
eq. 107-12
Sabiendo que ER = s ER0, podemos hacer un arreglo algebraico en eq. 107-12 y escribe:
eq. 107-13
Cabe señalar que las dos ecuaciones anteriores parecen ser iguales pero no lo son. Mientras que la primera (eq. 107-12) está referida a la frecuencia de la tensión inducida en el rotor (fr), la segunda se refiere a la frecuencia del estator
(fs). Es decir, la eq. 107-13 muestra lo que sucede con el rotor cuando se "mira" desde el lado del estator.
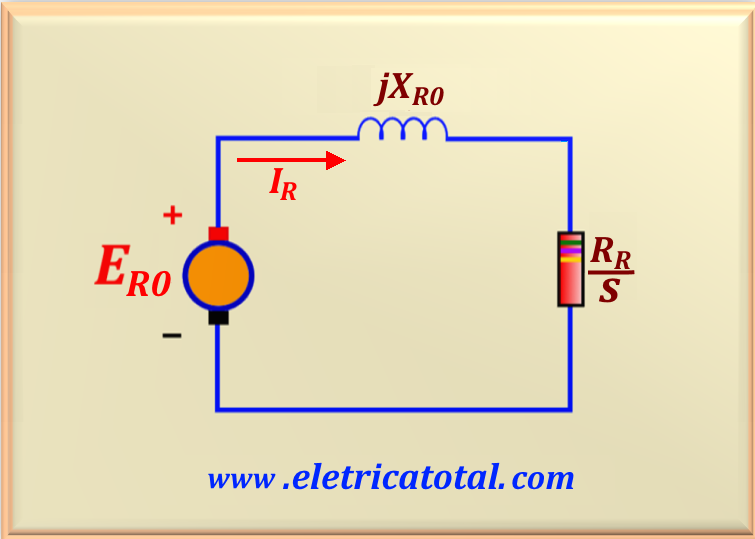
Y a partir de esta ecuación podemos rehacer el modelo eléctrico del rotor como se muestra en la Figura 107-05.
Figura 107-05
Obsérvese que cuando el deslizamiento es muy bajo, es decir, el rotor gira próximo a la velocidad síncrona, el término resistivo es mucho mayor que la reactancia del rotor, con predominio de la resistencia del rotor, y con ello, la corriente varía linealmente con deslizamiento. Y cuando el deslizamiento es alto, es decir, la máquina gira lentamente (o está parada), XR0
es mucho mayor que RR / s y la corriente del rotor se aproxima a un valor de régimen permanente en esta situación.
Para obtener el circuito equivalente final por fase de un motor de inducción, es necesario
que la parte del rotor en el modelo se refiere al lado del estator. El modelo de circuito del
rotor que se referirá al lado del estator es el modelo que se muestra en la Figura 107-05, que
tiene todos los efectos de la variación de la velocidad concentrados en el término de impedancia.
Cuando estudiamos los transformadores en el Capítulo 91, vimos que era posible referirse a voltajes, corrientes e impedancias de secundaria a primaria a través de las ecuaciones eq. 91-02 y eq. 91-03. Este mismo tipo de transformación se puede aplicar en el caso del rotor de un motor de inducción. Definiendo la relación de transformación efectiva como aef, entonces el voltaje del rotor se puede expresar como:
eq. 107-14
De la misma manera podemos escribir la corriente del rotor como
eq. 107-15
Y la impedancia del rotor se puede definir como
eq. 107-16
Y ahora adoptemos las siguientes definiciones:
eq. 107-17
eq. 107-18
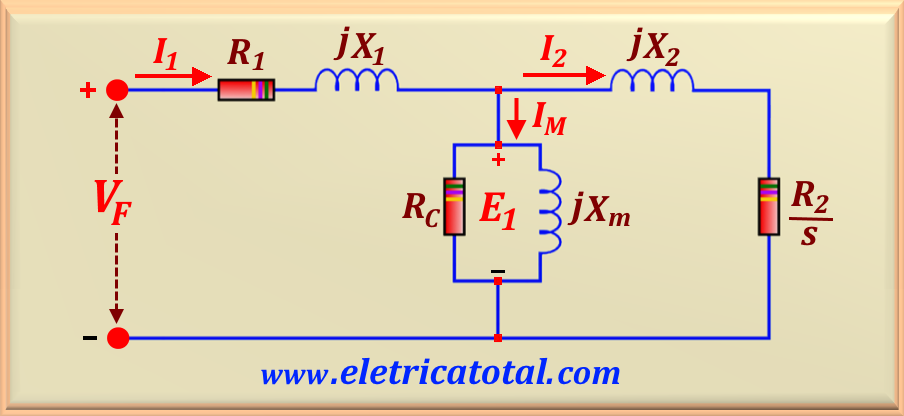
Al adoptar estas definiciones anteriores, podemos mostrar el modelo eléctrico final del motor de inducción como puede ser
visto en Figura 107-06.
Figura 107-06
En la práctica es muy difícil conocer o medir estos parámetros del motor de inducción jaula de ardilla. Sin embargo,
existen métodos prácticos para medir la resistencia del rotor, R2, y la reactancia, X2.
Presentaremos estos métodos más adelante.
Un motor de inducción se puede describir básicamente como un transformador rotativo. En un motor de inducción típico, los devanados secundarios (rotor) están en cortocircuito, por lo que no hay salida eléctrica. En cambio, la salida es mecánica.
Cuando declaramos la potencia nominal de un motor en HP o en kW, significa que esta potencia es la potencia disponible en el eje del motor, P n . La potencia que debe desarrollar el rotor es la potencia nominal, Pn, más las pérdidas asociadas al eje, como las pérdidas del ventilador ( ya que está acoplado al eje) y las pérdidas por fricción en los cojinetes que sujetan el rotor en su lugar. Además, hay que sumar las pérdidas en el cobre del rotor, que llamaremos Pjr (pérdidas en julios en el rotor). Entonces podemos representar la potencia que el
rotor debe desarrollar Pgap. La razón de este nombre se explicará más adelante. De esta manera, podemos escribir:
eq. 107-19
Donde las variables involucradas son:
Pn ⇒ es la potencia nominal del motor;
Pw ⇒ es la potencia que se refiere a pérdidas de ventilador;
Pfr ⇒ es la potencia debida a las pérdidas por fricción;
Pjr ⇒ son las pérdidas en julios en el rotor de cobre.
Cabe señalar que muchos autores tienden a reunir en una sola variable la suma de las pérdidas por ventilador y las pérdidas por fricción
y llámelo pérdidas rotacionales, representado por Prot. En este caso tenemos
Prot = Pw + Pfr.
Las pérdidas en el núcleo de un motor de inducción provienen en parte del circuito del estator y en parte del circuito del rotor.
Dado que un motor de inducción normalmente opera a una velocidad
cerca de la velocidad síncrona, el movimiento relativo de los campos magnéticos
en la superficie del rotor es muy lenta y las pérdidas en el núcleo del rotor son muy pequeñas
en comparación con el estator.
Cuanto mayor sea la velocidad de un motor de inducción, mayores serán las pérdidas
por fricción y ventilación. Por otro lado, cuanto mayor sea la velocidad del
rotor (hasta nsync), menores serán las pérdidas de núcleo. Por lo tanto, estas tres categorías de pérdidas a veces se combinan y se denominan pérdidas rotacionales. Las pérdidas rotacionales totales de un motor a menudo se consideran constantes con velocidad variable, porque las diversas pérdidas varían en direcciones opuestas con el cambio de la velocidad.
Después de analizar el rotor y la potencia que debe recibir para conseguir la potencia nominal en el eje
del motor, analicemos el circuito del estator. Empezamos con las pérdidas de julios en el devanado del estator que,
según el modelo
de la Figura 107-06, está dada por PE = 3 R1 . I12, donde
PE son las pérdidas en las tres fases del estator. Además, podemos sumar las pérdidas por histéresis y las corrientes parásitas en el núcleo del estator, al que llamaremos Piron. Así, la potencia de entrada de la máquina cubre estas pérdidas, más la potencia necesaria que debe ser transferida al rotor a través del entrehierro entre el rotor y el estator.
Esta potencia se denomina potencia de entrehierro, que anteriormente representamos como Pgap.
Por tanto, si deseamos calcular la potencia nominal del motor, es decir, la potencia sobre el eje del motor, podemos reescribir la eq. 107-19 de la siguiente manera:
eq. 107-20
Teniendo en cuenta lo expuesto anteriormente, podemos encontrar la potencia consumida por el motor en relación a la red de alimentación.
eq. 107-21
Debemos recordar que, eléctricamente, la potencia consumida por el motor, teniendo en cuenta el factor de potencia (FP = cos φ), viene dada por eq. 107-23.
eq. 107-22
Donde las variables involucradas son:
Pin - potencia de entrada del motor en vatios;
VL - voltaje de línea principal en voltios;
IL - corriente de línea (IL = I1 según Figura 107-06) en amperios;
φ - ángulo de retraso entre VL y IL.
Para completar este ítem, calculemos la eficiencia o rendimiento del motor, dada por eq. 107-23.
En este ítem calcularemos la potencia y el conjugado desarrollado por el motor de inducción. Inicialmente, basado en el circuito de Figura 107-06 y mirando de cerca el circuito, puede ver que el único elemento que puede consumir
la potencia desarrollada en el entrehierro es la resistencia representada por R2/s. Entonces, podemos expresar la potencia en el entrehierro por eq. 107-24.
eq. 107-24
Las pérdidas en el núcleo del rotor se pueden expresar por eq. 107-25.
eq. 107-25
Las pérdidas de cobre del rotor se pueden expresar mediante eq. 107-26.
eq. 107-26
Tenga en cuenta que reemplazando eq. 107-26 en eq. 107-24 fácilmente concluimos que:
eq. 107-27
Después de las pérdidas en el cobre del estator, el cobre del núcleo y del rotor son
restada de la potencia de entrada del motor. La potencia restante se convierte de la forma
eléctrico a mecánico. Esta potencia convertida, a veces denominada potencia mecánica desarrollada, está dada por
eq. 107-28
Si en la ecuación anterior reemplazamos las variables por sus respectivos valores, según las ecuaciones eq. 107-24
y eq. 107-26, podemos escribir la eq. 107-28 después de algún trabajo algebraico, o
eq. 107-29
Por tanto, cuanto menor sea el deslizamiento del motor, menores serán las pérdidas en el rotor de la máquina. También tenga en cuenta que,
si el rotor no gira, el deslizamiento
será s = 1 y la potencia del entrehierro se consumirá por completo en el rotor.
Observe también que, asociando las ecuaciones eq. 107-27 y eq. 107-28, podemos escribir otra relación entre la potencia del entrehierro y la potencia mecánica, a saber:
eq. 107-30
Y, finalmente, si conocemos las pérdidas por ventilación y fricción, podemos calcular la salida o potencia nominal del motor a través de la eq. 107-31.
eq. 107-31
Para concluir este punto, calculemos el torque que desarrolla el motor. Sabemos que el torque está dado por
relación entre potencia y velocidad angular. Entonces, expresemos esta cantidad como una función de la potencia desarrollada en el entrehierro y la velocidad angular sincrónica dada por eq. 107-32.
eq. 107-32
El torque dado por eq. 107-32 es el torque inducido en el rotor del motor. No es el torque en el eje del motor. Este torque, conocido como torque nominal o torque de salida, actúa directamente sobre la carga. Por eso lo llamaremos τload, indicando que actúa sobre la carga. Y está dado por eq. 107-33.
9. Modificaciones al Modelo de Circuito Equivalente
Parte de la potencia que fluye en el entrehierro de un motor de inducción se consume como
pérdidas en el cobre del rotor, representadas por la fracción s, mientras que la otra parte se convierte en potencia mecánica para accionar el eje del motor, representada por la fracción 1 - s. Por lo tanto, es evidente que a partir de esta declaración un motor de inducción que opera con alto deslizamiento es un motor extremadamente ineficiente. Entonces es posible separar estas dos partes de la potencia del entrehierro y
expresarlos por separado en el circuito equivalente del motor.
La eq. 107-24 da una expresión de la potencia total de entrehierro para
un motor de inducción, mientras que el eq. 107-26 da las pérdidas reales del rotor del
motor. La potencia del entrehierro es la potencia que se consumiría en una resistencia de
valor R2 / s, mientras que las pérdidas en el cobre del rotor se expresan por la potencia que
se consumiría en una resistencia de valor R2. La diferencia entre ellos es Pmec y seria la potencia consumida en una resistencia de valor según la eq. 107-33.
eq. 107-34
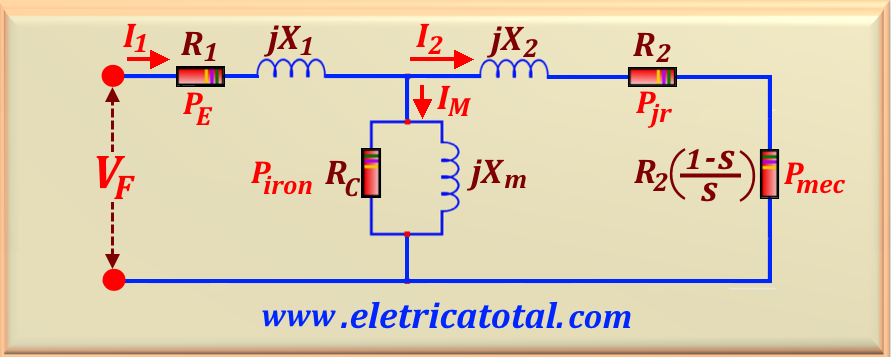
La Figura 107-07 muestra el circuito equivalente por fase donde se puede apreciar, en la forma
de diferentes elementos del circuito, las pérdidas de cobre del rotor y la potencia convertida
a la forma mecánica.
10. Equivalente de Thévenin del Motor de Inducción
Sabemos que la potencia del entrehierro es la potencia que cruza el entrehierro entre
el circuito del estator y el circuito del rotor. Es igual a la potencia absorbida en la resistencia R2/s.
Una forma posible de encontrar esta potencia es calcular la corriente del rotor, I2, como ya hemos estudiado
eq. 107-24 lo que nos da la potencia total en el entrehierro. Por razones didácticas lo repetiremos a continuación.
eq. 107-24
Entonces, si hay una forma de determinar I2, entonces la potencia del entrehierro y el conjugado inducido será conocido. Una de las formas más simples de determinar esta corriente es usando el equivalente de Thévenin del
circuito que está a la izquierda del circuito del rotor. Recordando que el teorema de Thévenin establece que cualquier
circuito lineal que se puede separar por dos terminales
del resto del sistema, puede ser reemplazada por una sola fuente de voltaje en serie con un
impedancia equivalente. Si esto se hiciera con el circuito equivalente del motor de
inducción, el circuito resultante sería una simple combinación de elementos en serie.
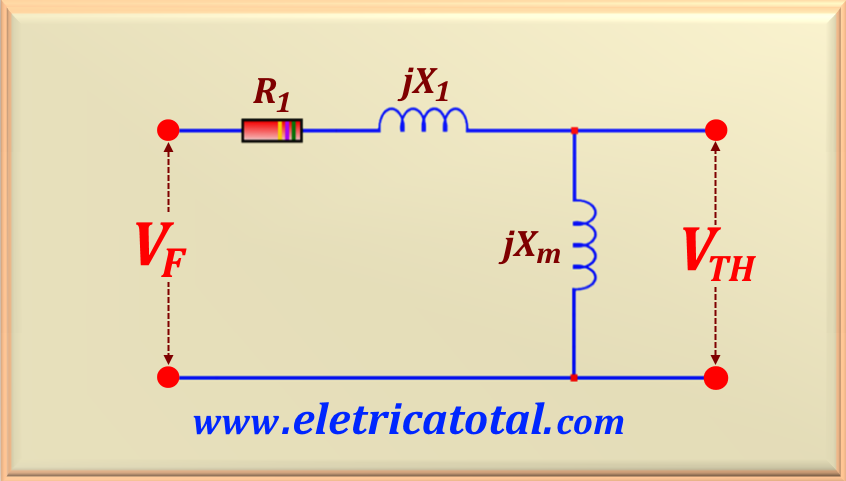
Para calcular el equivalente de Thévenin del lado de entrada del motor de inducción, primero debemos eliminar el
circuito del rotor, como se muestra en Figura 107-08.
Figura 107-08
Para calcular el voltaje de Thévenin podemos usar un divisor de voltaje. Llamando Zx a
suma de todos los componentes, tenemos:
eq. 107-35
Aplicando el divisor de voltaje, obtenemos:
eq. 107-36
Si estamos interesados en calcular el módulo de voltaje de Thévenin, entonces debemos definir el módulo de impedancia Zx, que representaremos como Zx2, según el eq. 107-37.
eq. 107-37
De esta forma, el módulo de la tensión Thévenin viene dado por eq. 107-38.
eq. 107-38
Sin embargo, teniendo en cuenta que ( X1 + Xm )2 >> R12 ,
podemos reescribir la eq. 107-38 logrando una gran aproximación a través de la eq. 107-39.
eq. 107-39
Podemos definir la fracción que aparece en eq. 107-39 como Kth = Xm / X1 + Xm. Entonces, podemos escribir:
eq. 107-40
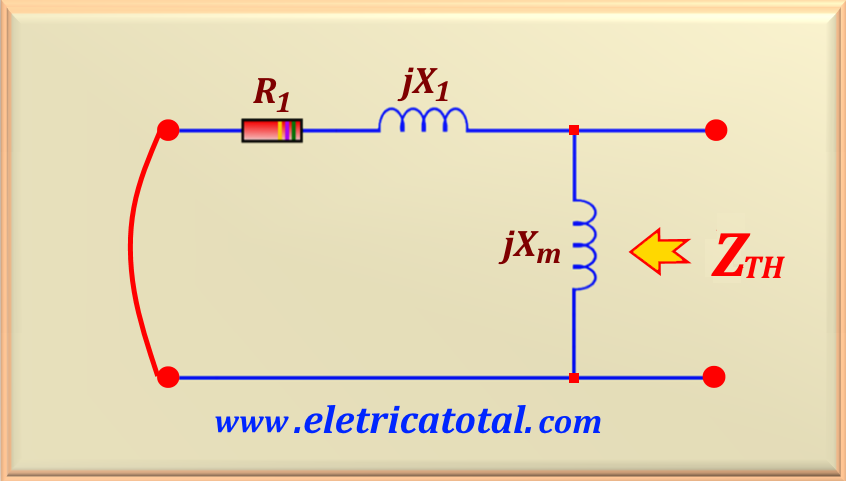
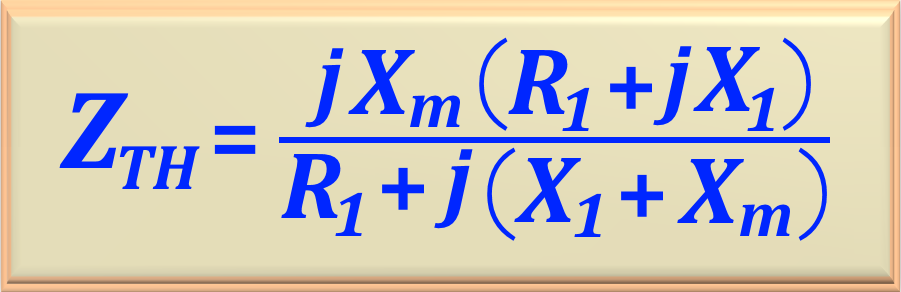
Para calcular la impedancia de Thévenin vamos a definirla como ZTH = RTH + j
XTH. El circuito utilizado para el cálculo se presenta en la Figura 107-09, donde la fuente de voltaje VF ha sido cortocircuitado para poder aplicar el teorema de Thévenin.
Figura 107-09
Entonces, para encontrar el valor de ZTH debemos encontrar el paralelo de las impedancias que se muestran en el circuito. Así, aplicando la regla básica de dos impedancias en paralelo, tenemos:
eq. 107-41
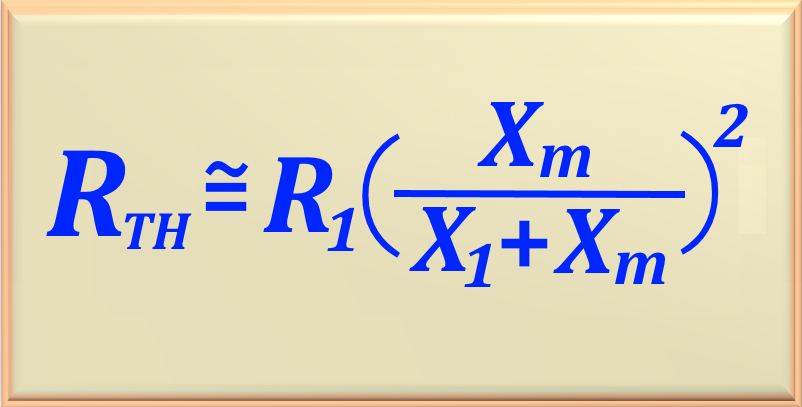
Nuevamente, considerando que ( X1 + Xm )2 >> R1 2 podemos
aproximar la eq. 107-41 por eq. 107-42, es decir:
eq. 107-42
Como previamente definimos la variable Kth, entonces podemos escribir la eq. 107-42 como:
eq. 107-43
Y considerando que ( X1 + Xm )2 >> R1 2 podemos escribir el
ecuación que aproxima el valor de XTH.
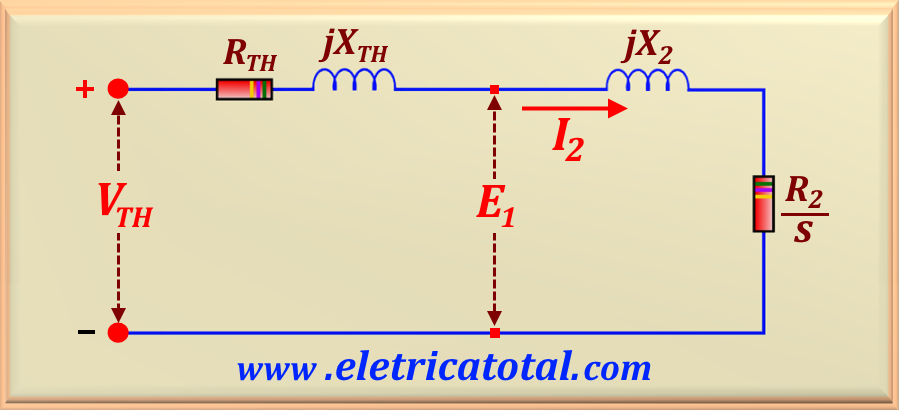
Con el cálculo del equivalente de Thevenin en el punto anterior, podemos mostrar el circuito equivalente del
motor de inducción como se muestra por Figura 107-10.
Figura 107-10
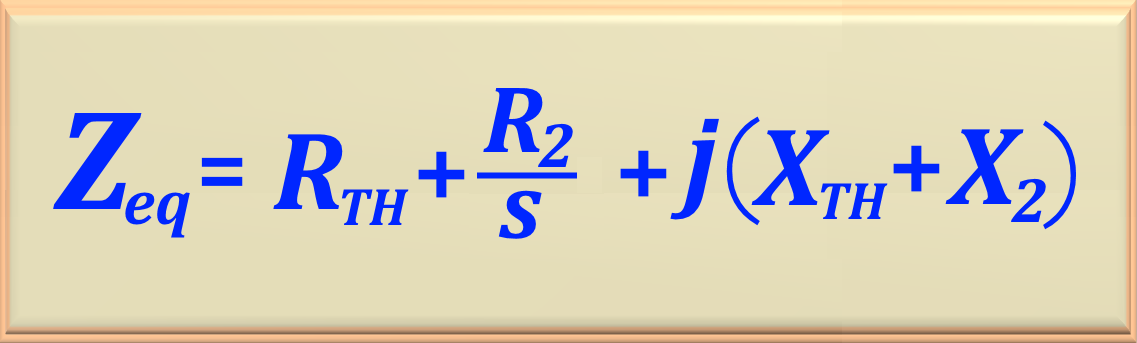
Con el modelo de circuito equivalente podemos calcular fácilmente el valor de I2. Para ello encontraremos la impedancia equivalente de todo el circuito.
eq. 107-45
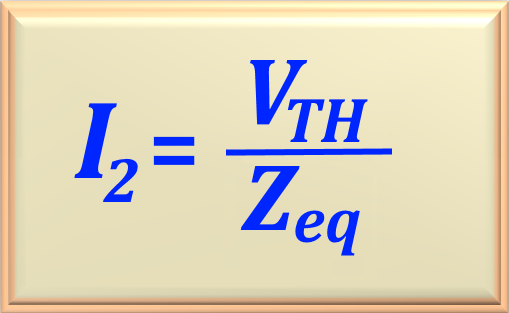
Por tanto, para calcular el valor de I2 basta aplicar la ley de Ohm, o bien:
eq. 107-46
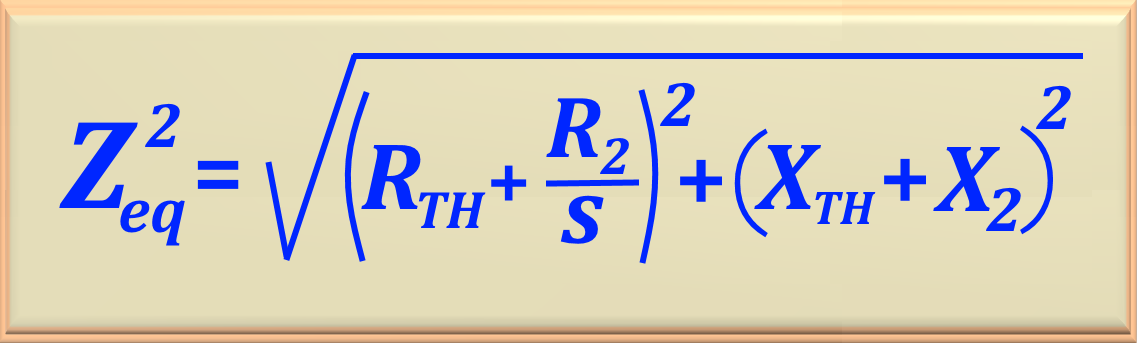
Y para encontrar el módulo de la corriente I2 definamos la variable
Z22
a través de la eq. 107-47.
eq. 107-47
De esta manera podemos encontrar el módulo de la corriente I2 usando eleq. 107-48.
eq. 107-48
Recordemos que la potencia en el entrehierro del motor viene dada por la eq. 107-24, repetido a continuación.
eq. 107-24
Para calcular esta potencia, definamos la variable Z'eq dada por eq. 107-49 a continuación.
eq. 107-49
Sustituyendo en eq. 107-24 el valor de I2 dado por eq. 107-48, busquemos la potencia
de entrehierro según los valores del equivalente de Thévenin. Pronto:
eq. 107-50
Recordemos que el conjugado inducido del motor viene dado por eq. 107-32, repetido a continuación.
eq. 107-32
Sustituyendo en eq. 107-32 el valor de Pgap dado por eq. 107-50, encontremos el conjugado
de la armadura del motor en función de los valores del equivalente de Thévenin. Así:
eq. 107-51
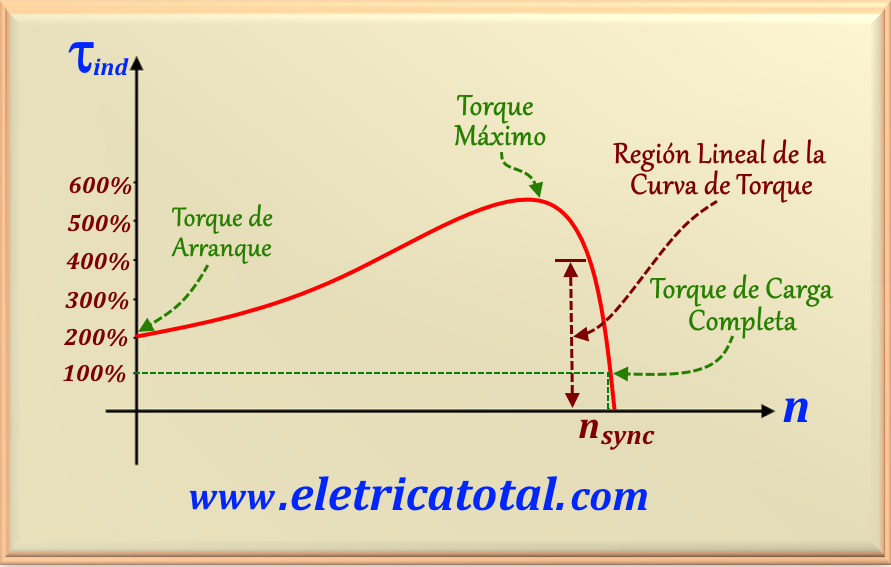
La Figura 107-11 muestra un gráfico del conjugado de un motor de inducción en
función de la velocidad (y el deslizamiento).
Figura 107-11
Del gráfico que se muestra en la Figura 107-11 podemos derivar la siguiente información:
1. - El conjugado inducido por el motor es cero a velocidad síncrona;
2. - La curva de conjugado versus velocidad es aproximadamente lineal entre la carga
vacío y carga completa. En este rango, la resistencia del rotor es mucho mayor que
su reactancia. De esta manera, la corriente del rotor, el campo magnético del rotor y
el conjugado inducido aumenta linealmente al aumentar el deslizamiento;
3 - Hay un conjugado máximo posible que no se puede exceder. Este conjugado,
llamado conjugado máximo, es de 2 a 3 veces el par total nominal de
carga completa del motor;
4 - El conjugado de arranque del motor es ligeramente superior a su conjugado de arranque con
carga completa, por lo que este motor impulsará cualquier carga
que puede conducir a toda potencia;
5 - Observe que el conjugado motor para un deslizamiento dado varía con el
cuadrado del voltaje aplicado. Este hecho es útil en una de las formas de controlar
velocidad de los motores de inducción.
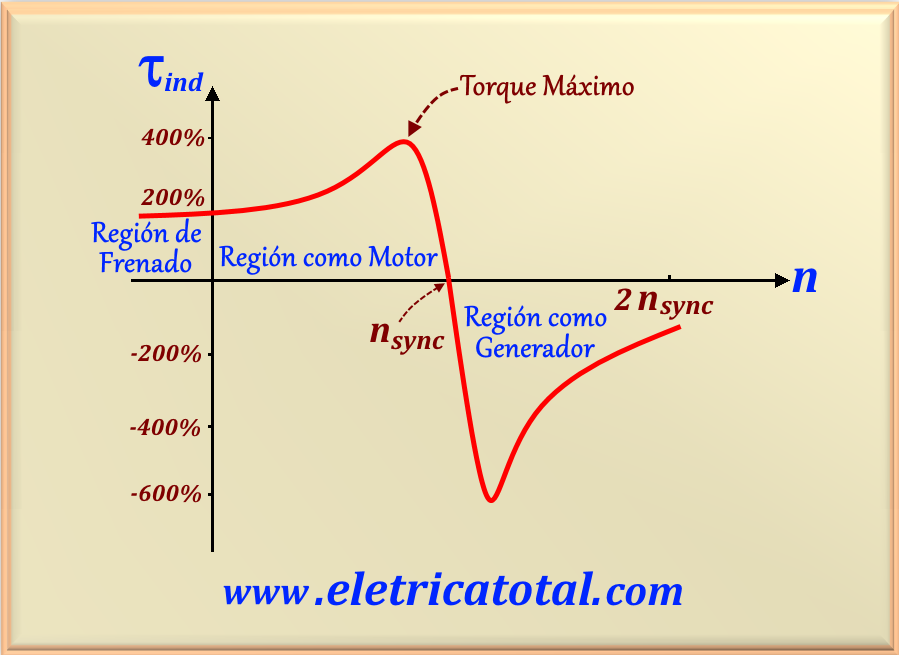
La Figura 107-12 muestra una curva característica de conjugado versus velocidad de un motor de inducción, mostrando los rangos extendidos de operación, donde se ve el < x>región de frenado y la región como generador.
Figura 107-12
Observando el gráfico que se muestra en la Figura 107-12 podemos sacar las siguientes conclusiones:
1. - Si el rotor del motor de inducción se impulsa más rápido que la velocidad síncrona, entonces
la dirección del conjugado inducido se invierte y la máquina se convierte en un generador, convirtiendo la energía mecánica en energía eléctrica;
2. - Si el motor gira hacia atrás con respecto a la dirección de los campos magnéticos, entonces el
conjugado inducido en la máquina frenará la máquina muy rápidamente
y tratará de hacerlo girar en sentido contrario. Como la inversión
de rotación del campo magnético es simplemente una cuestión de cambiar
dos fases del estator, este hecho se puede aprovechar para frenar muy rápidamente un motor de inducción. El acto de intercambiar dos fases por conmutación, para frenar el motor muy rápidamente, esto se llama frenado por inversión de fase .
Como el conjugado inducido viene dado por eq. 107-32, el conjugado máximo posible se produce cuando la potencia de
entrehierro es máximo. Como la potencia del entrehierro es igual a la potencia consumida en la resistencia R2 /s, el conjugado máximo inducido se producirá cuando
la potencia consumida por esta resistencia es máxima.
En una situación en la que el ángulo de impedancia de carga es fijo, el teorema de máxima transferencia de potencia establece que que la máxima transferencia de energía a la resistencia de carga R2 /s ocurrirá cuando
el valor de la impedancia es igual al valor de la impedancia de la fuente. El módulo de impedancia de la fuente, Zf, es dada por eq. 107-52.
eq. 107-52
Por lo tanto, la máxima transferencia de potencia ocurre cuando R2 /s = Zf. De esta relacion
podemos encontrar el deslizamiento para conjugado máximo, smax, haciendo alguna manipulación algebraica en la relación mostrada en este párrafo y llegando eq. 107-53.
eq. 107-53
Tenga en cuenta que la resistencia del rotor referenciada R2 solo aparece en el numerador. Así,
el deslizamiento del rotor al conjugado máximo es directamente proporcional a la resistencia del rotor.
El valor conjugado máximo se puede encontrar ingresando la expresión para
el deslizamiento de conjugado máximo en la ecuación de conjugado según eq. 107-51.
Entonces, la ecuación de conjugado máximo resultante es
eq. 107-54
Este conjugado es proporcional al cuadrado de la tensión de alimentación y se relaciona
también con la inversa de las impedancias del estator y del rotor. Cuanto más pequeños son
las reactancias de una máquina, mayor es el conjugado máximo que es capaz de
alcanzar. Tenga en cuenta que el deslizamiento para el que se produce el conjugado máximo es
directamente proporcional a la resistencia del rotor, R2, pero el valor del conjugado máximo es independiente del valor de esta resistencia según eq. 107-54.
En muchos casos, los motores de inducción de arranque pueden ser
simplemente conectándolos directamente a la línea eléctrica. Esto solo es posible si el motor es de baja potencia, máximo
10 HP. Sin embargo, algunos
a veces hay razones para no hacerlo. Por ejemplo, la corriente de arranque puede
provocar una caída de tensión tan temporal en el sistema eléctrico que haga inaceptable la
salida con conexión directa a la línea. Este es el caso de los motores de alta potencia, arriba 10 HP.
En el caso de motores de inducción bobinados, el arranque puede ser
hecho con corrientes relativamente bajas mediante la inserción de resistencias adicionales en el circuito del
rotor durante el arranque. Estas resistencias no solo aumentan el conjugado de arranque,
así como reducir la corriente de entrada.
En el caso de los motores de inducción de jaula de ardilla, la corriente de arranque pueden
varíar mucho dependiendo fundamentalmente de la potencia nominal del motor y de la
resistencia efectiva del rotor en condiciones de arranque. Para estimar la corriente del rotor
en condiciones de arranque, todos los motores de jaula de ardilla ahora tienen una letra identificando el
código de arranque (que no debe confundirse con su clase de torque) en sus placas de identificación.
La letra de código especifica límites a la cantidad de corriente que
el motor puede consumir al arrancar.
Estos límites se expresan en términos de la potencia aparente de arranque del motor
según su especificación de potencia nominal (HP). Tabla 107-01 es una tabla que contiene el
kilovoltios-amperios por HP para cada letra de código.
Tabla 107-01
Letra do Código de Arranque
Rotor Bloqueado, kVA/HP
A
0 a 3,15
B
3,15 a 3,55
C
3,55 a 4,00
D
4,00 a 4,50
E
4,50 a 5,00
F
5,00 a 5,60
G
5,60 a 6,30
H
6,30 a 7,10
J
7,10 a 8,00
K
8,00 a 9,00
L
9,00 a 10,00
M
10,00 a 11,20
N
11,20 a 12,50
P
12,50 a 14,00
R
14,00 a 16,00
S
16,00 a 18,00
T
18,00 a 20,00
U
20,00 a 22,40
V
22,40 e acima
Cómo Usar la Tabla
Consideremos el siguiente ejemplo. Sea un motor de inducción trifásico de 20 HP funcionando a 220 V y
código inicial con la letra F.
De acuerdo con la Tabla 107-01, el máximo de kilovoltios-amperios por HP es 5,6. Así que los
kilovoltios-amperios máximos de arranque de este motor es:
Sstart = 15 (HP) x 5,6 = 84 kVA
Entonces, la corriente de arranque del motor será:
IL = Sstart / √3 VT = 84 kVA / √3 x 220 V
Haciendo las matemáticas, encontramos:
IL = 220 A
Cuando la corriente de arranque es demasiado alta, es necesario reducirla adoptando un circuito de arranque adecuado. Sin embargo, debemos considerar que cuando reducimos la corriente de arranque, el conjugado de arranque del motor también se reducirá.
Vamos a estudiar algunas alternativas para solucionar este problema.
Es normal que los fabricantes proporcionen a sus motores de mayor potencia seis terminales, donde cada dos terminales
representan el devanado de una fase. En este caso, es posible conectar el motor en una conexión Triángulo o Estrella.
Por lo tanto, una forma de reducir la corriente de arranque de un motor de inducción es conectarlo en la configuración Estrella al arrancar. Después de que el motor alcanza una velocidad cercana a la velocidad de trabajo, la conexión se cambia a una configuración Delta. Este procedimiento es factible, ya que en la conexión Estrella, la tensión en el devanado de fase del motor es igual al voltaje de línea dividido por el factor √3. De esta forma, con menor tensión en sus terminales la corriente de arranque se reduce en factor √3.
En general, podemos afirmar que el par de arranque varía con el cuadrado de la tensión aplicada por fase.
Así, en una conexión en estrella, la tensión de fase es 1 / √3 la tensión de línea. Entonces el par se reduce en
3 veces en relación con el enlace delta.
Por lo tanto, una corriente más baja producirá un par de arranque más bajo. Cuando es posible arrancar el motor con una corriente de arranque de aproximadamente 58% de la corriente de arranque nominal, este método, que es bastante económico, es empleado a menudo.
El cambio de la conexión Estrella a la conexión Delta debe hacerse lo más rápido posible para
eliminar grandes corrientes transitorias debido a la pérdida momentánea de energía. Por este motivo, se dará preferencia a las llaves de doble posición con resorte acoplado, en detrimento de las llaves simples de tipo cuchillo.
En este caso, es posible utilizar autotransformadores para reducir la tensión de alimentación del motor. Cuando el motor
alcanza un rotación cercana a la rotación de operación, el autotransformador se retira del circuito y el motor comienza a
ser alimentado directamente a través de la red.
Debemos entender que cuando reducimos la tensión de alimentación, la corriente también disminuye en la misma proporción.
Sin embargo, el conjugado (torque) de arranque disminuye con el cuadrado del voltaje aplicado. Así, al aplicar esta
técnica, es importante verificar que la corriente de arranque produzca el conjugado necesario para arrancar la carga acoplada al eje del motor.
El desarrollo del rotor de doble jaula ha creado tal versatilidad con respecto al diseño del motor de inducción
lo que condujo a una variedad de características de torque-deslizamiento. Ajustando convenientemente el devanado rotor de jaula, los fabricantes han desarrollado numerosas variantes del diseño de rotor de fundición simple o normal. Para distinguir entre los distintos tipos disponibles, basada en estudios
de la Asociación Nacional de Fabricantes Eléctricos (NEMA), adoptó un sistema de código alfabético, en el que cada tipo de motor de inducción de jaula de ardilla cae en una determinada categoría designada por una letra.
Básicamente, hay cuatro tipos de motores de inducción. Tenemos las clases A, B, C y D. Vamos
describirlos por separado.
El motor clase A es un motor de inducción de tipo jaula normal construido para un uso de velocidad normal. A
resistencia reactiva X2 del circuito equivalente de un motor de inducción representa la forma
referida al estator a partir de la reactancia de dispersión del rotor. En general, cuanto más lejos esté la barra del estator
del rotor, o de una parte de él, mayor será la reactancia de dispersión, porque un porcentaje menor del flujo del bus llegará al estator. Por lo tanto, si las barras de un rotor de
jaula de ardilla se colocan cerca de la superficie del rotor, solo tendrán
un pequeño flujo de dispersión y la reactancia X2 serán pequeños en su circuito equivalente. Por otro lado, si las barras se colocan más profundamente en la superficie
del rotor, habrá más fugas y la reactancia del rotor X2 será mayor.
Al hacer las barras del rotor de gran tamaño y colocarlas cerca de la superficie del rotor, esta forma constructiva
tendrá una resistencia baja (debido a su gran sección transversal) y una reactancia de dispersión (X2)
bajo (debido a la ubicación de la barra cerca del estator). Como la resistencia del rotor
es baja, el conjugado máximo estará muy cerca de la velocidad síncrona (ver eq. 107-53) y el motor estará muy
eficiente.
Debido a la buena eficiencia de este motor, muy poca potencia del entrehierro se perderá en la resistencia del rotor.
Sin embargo, como R2 es pequeño, el conjugado de arranque del motor se sitúa entre 1,5 a 2
veces el conjugado nominal a plena carga. Y su corriente de arranque será alta, con un rango de 5 a 7 veces la corriente nominal, lo que la hace menos deseable para arranque directo, principalmente para motores de potencia superior a 5 HP.
Este tipo de forma constructiva se denomina clase A
por la Asociación Nacional de Fabricantes Eléctricos (NEMA). Es más o menos un motor de inducción típico,
sus características son básicamente las mismas que las de un motor de rotor bobinado sin inserción de resistencia extra.
Su característica de conjugado en función de la velocidad se muestra en la Figura 107-13.
Los motores Clase B tienen un conjugado de arranque ligeramente inferior al normal, un deslizamiento bajo y una corriente de arranque más baja. Esta clase tiene un devanado más profundamente incrustado en las ranuras del rotor, lo que provoca un aumento en la reactancia de arranque del motor. El aumento de la reactancia de arranque reduce un poco el conjugado de arranque, pero también reduce la
corriente de arranque. Actualmente, los motores de clase B están reemplazando a los de clase A.
Los motores Clase C tienen un alto conjugado de arranque, baja corriente de arranque y bajo deslizamiento (menos del 5 %) a plena carga. El conjugado máximo es ligeramente inferior al de los motores clase A, mientras que
el conjugado de arranque sea hasta 250 % del conjugado a plena carga. Estos motores son
construidos con rotores de doble jaula de ardilla, por lo que son más caros
que los motores de clases anteriores. Se utilizan para cargas con alto
conjugado de arranque como bombas, compresores y transportadores, todos
inicialmente ya cargado. Sin embargo, cuando se usan con cargas de alta inercia tienen una disipación térmica limitada.
Los motores Clase D tienen un conjugado de arranque muy
alto (275 % o más del conjugado nominal) y una corriente de arranque baja. Ellos
también tienen alto deslizamiento a plena carga. Básicamente son motores
de inducción comunes de clase A, cuyas barras de rotor son más pequeñas y están hechas de un material de mayor resistividad. La alta resistencia del rotor compensa el conjugado máximo
hasta una velocidad muy baja. Es por esto que estos motores se conocen como motores de rotor de alta resistencia.
El deslizamiento a plena carga de estos
motores es muy alta, debido a la alta resistencia del rotor. Típicamente, es 7 % a
11 %, pero puede llegar hasta el 17 % o más. Estos motores se utilizan en aplicaciones
que requieren la aceleración de cargas con inercia extremadamente alta, especialmente
los grandes volantes utilizados en las prensas de punzonado, estampado o corte.