Cuando se utiliza una máquina síncrona como motor, se espera que cuando se conecte a una fuente de alimentación pueda arrancar como lo hace una máquina de CC o un motor de inducción. Sin embargo, un motor síncrono no tiene esta capacidad. Si los campos polares están excitados por la corriente de campo y los terminales del estator están conectados a una fuente de alimentación de CA, el motor síncrono no arrancará; por el contrario, comenzará a vibrar.
Cabe señalar que estas máquinas se denominan síncronas porque giran a una velocidad y frecuencia constantes y de acuerdo con la frecuencia del sistema de alimentación.
Una máquina síncrona tiene los devanados trifásicos en el estator, distribuidos de tal manera que están 120° eléctricamente desfasados. El devanado
del estator, al que está conectada la fuente de tensión AC, también se denomina devanado del inducido. Está diseñado para soportar altos voltajes y altas corrientes.
El devanado de campo está instalado en el rotor, que se alimenta con corriente CC. El devanado de campo
está alimentado por una fuente externa de CC a través de anillos colectores y escobillas.
Las máquinas síncronas se pueden dividir en dos grupos:
Máquinas de alta velocidad con rotores cilíndricos (o de polos no salientes).
Máquinas de baja velocidad con rotores de polos salientes.
Cuando se utiliza una máquina síncrona como motor, se espera que cuando se conecte a una fuente de alimentación pueda arrancar como lo hace una máquina de CC o un motor de inducción. Sin embargo, un motor síncrono no tiene esta capacidad. Si los campos polares están excitados por la corriente de campo y los terminales del estator están conectados a una fuente de alimentación de CA, el motor síncrono no arrancará; por el contrario, comenzará a vibrar. Podemos decir que una máquina síncrona está doblemente excitada; los polos del rotor son alimentados por una corriente DC, mientras que los devanados del estator son alimentados por una fuente CA.
El flujo en el entrehierro de la máquina es el resultado del flujo proporcionado por el devanado del rotor y el devanado del estator. Así, si en un motor síncrono el devanado de campo del rotor proporciona
sólo la excitación necesaria, el estator no consumirá corriente reactiva, es decir, el motor está operando con un factor de potencia unitario. Si se reduce la corriente en el devanado del rotor, el devanado del estator extraerá una corriente reactiva retardada de la fuente de CA para reforzar la magnetización en el entrehierro.
De lo contrario, es decir, si aumentamos la excitación en el devanado del rotor, el devanado del estator extraerá una corriente reactiva temprana de la fuente de CA para compensar el aumento de flujo en el entrehierro. De esta forma, con solo variar la corriente de campo podemos variar el factor de potencia del motor síncrono.
Si no hay carga acoplada al eje del motor síncrono y simplemente flota en un sistema de potencia, puede comportarse como un inductor o como un capacitor, simplemente cambiando la corriente de campo en el rotor.< /p>
Una máquina síncrona sin carga se llama condensador síncrono. Se puede utilizar perfectamente en sistemas de alimentación para regular la tensión de línea. En la industria, puede operar junto con motores de inducción en modo sobreexcitado
para drenar una corriente reactiva en adelanto, de tal manera que se compense la corriente reactiva en atraso consumida por los motores de inducción. Como resultado, se produce una mejora significativa en el factor de potencia del parque industrial.
Cabe señalar que estas máquinas se denominan síncronas porque giran a una velocidad y frecuencia constantes y de acuerdo con la frecuencia del sistema de alimentación.
Básicamente, para que una máquina síncrona trifásica realice su movimiento de rotación, es necesario producir un
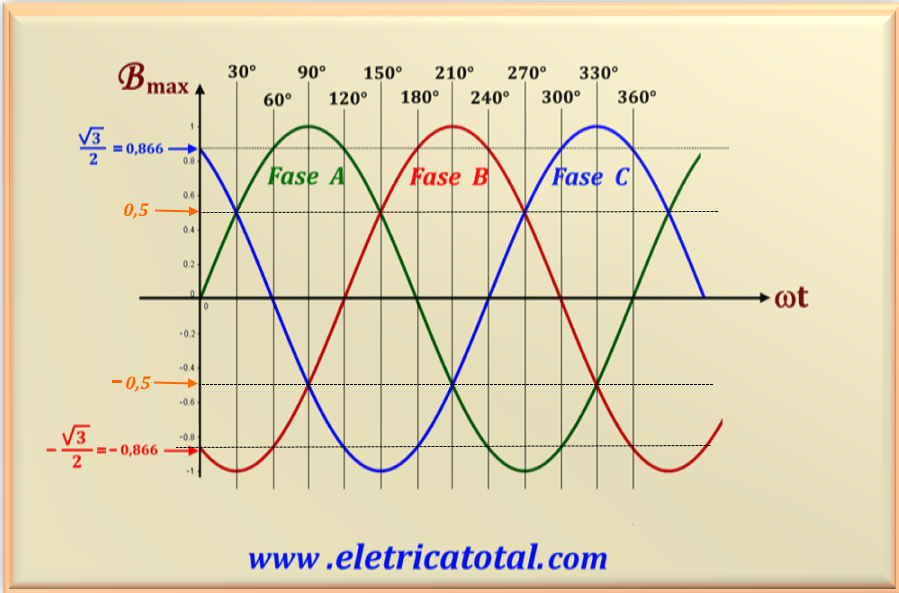
campo de inducción magnético trifásico giratorio. Para ello alimentamos las tres fases del motor con una red trifásica equilibrada, dispuestos simétricamente y eléctricamente 120° desfasados entre sí. Si se cumplen estas condiciones, se producirá un campo de inducción magnética constante, en magnitud, ya que su fase cambia en todo momento. En este ítem analizaremos cómo logramos esta condición.
Todo nuestro análisis se basa en la Figura 106-01. Esta figura muestra el gráfico de las tres fases desplazadas 120° entre si. Para mostrar la formación detallada del campo giratorio, proporcionamos la división del ángulo 360° en 12 líneas verticales compensadas por 30° entre si.
Por otro lado, llamaremos al campo de inducción magnética generado por la fase A como BA. Del mismo modo, para fase B como BB y para fase C como BC.
Figura 106-01
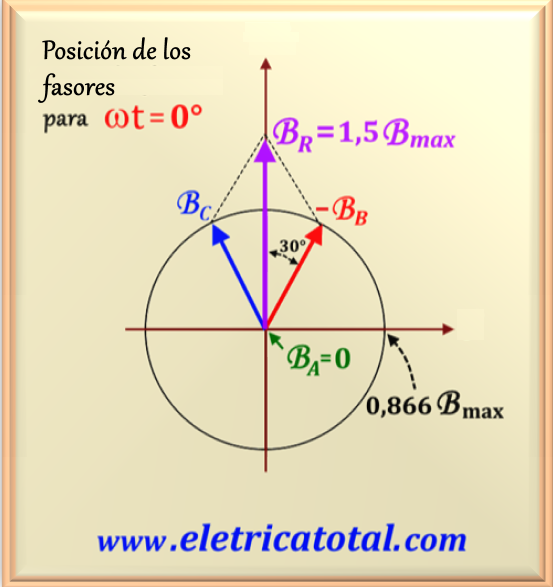
Analicemos cómo se forma el fasor resultante, inicialmente para el ángulo 0°. Tenga en cuenta que, en este caso,
el valor del campo de inducción magnética de la fase A, es nulo (BA = 0). Sin embargo, en el caso de las fases B y C, sus valores son distintos de cero y, en módulo, son iguales a 0,866Bmax , según el gráfico anterior. Nota que tienen signos opuestos. Entonces, teniendo esto en cuenta, podemos dibujar un gráfico donde será posible comprender la formación del campo de inducción magnética rotatoria.
Figura 106-02
En la Figura 106-02 mostramos la formación del campo de inducción magnética resultante. Observe que es el resultado de la
suma fasorial de BC con - BB. Preste atención al hecho de que la longitud de los fasores
BC y - BB son limitados por el círculo negro, indicando que el valor
del fasor es igual a 0,866 Bmax.
Como el fasor BB está 120° detrás de BA, entonces
el fasor - BB
debe estar 180° - 120° = 60° por delante delBA.
Una vez establecidas estas consideraciones, llegados a este punto, debemos hallar el valor del fasor resultante. Tenga en cuenta que los dos fasores,
-BB y BC, forman un ángulo de 30° con la vertical.
Recordando eso
|- BB | = |BC | = 0,866 Bmáx ,
calculamos fácilmente el fasor resultante, BR, usando un poco de trigonometría. Haciendo el cálculo a continuación:
BR = 0,866 Bmax cos (30°) + 0,866 Bmax cos (30°)
Nota que el primer gráfico es la proyección del módulo de - BB en el eje vertical. Y el segundo
parte es la proyección del módulo de BC también sobre el eje vertical. En el eje horizontal los
dos componentes se cancelan porque tienen signos opuestos. Por tanto, realizando el cálculo de la expresión anterior,
recordando que cos 30° = 0.866, llegamos al fasor resultante, o
eq. 106-01
Por tanto, concluimos que el fasor resultante es, en módulo, igual a 1,5 Bmax.
Cabe señalar que para ωt = 0° el fasor resultante forma un ángulo de 90° con la horizontal.
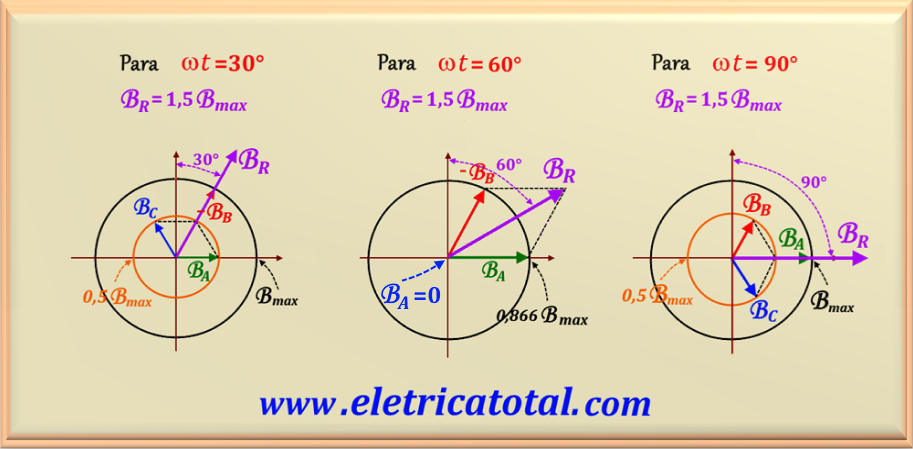
Ahora, calculemos el fasor resultante para valores de ωt distintos de cero. Disfruta Figura 106-
03 donde mostramos la formación del fasor resultante para ωt = 30°, ωt = 60° y ωt =
90°. Darse cuenta que, independientemente del ángulo considerado, el valor del fasor resultante, BR, en
módulo, es siempre igual a 1,5 Bmax. Pero, el lector debe ser consciente del hecho de que el
ángulo del fasorcambia a medida que aumentamos el ángulo de observación. Y más: como estamos usando la secuencia
directo o positivo, observe que el fasor resultante gira en el sentido de las agujas del reloj. Fácilmente
concluimos que si usamos la secuencia inversa o negativa, el fasor resultante gira en el sentido contrario de
las agujas del reloj.
Algunos autores, en sus libros, quieren demostrar que el fasor resultante BR gira en sentido antihorario.
Si bien definen las fases en secuencia directa, al elaborar el gráfico utilizan la secuencia inversa, ya que esta secuencia es la que
permite que el fasor resultante sea en sentido antihorario. En este sitio, elegimos mostrar que usando la secuencia directa el fasor
resultante gira en el sentido de las agujas del reloj.
Tenga en cuenta que para encontrar el valor del fasor resultante para ωt = 30°, usamos la trigonometría,
recordando eso | - BB | = Bmax, BC = 0,5 Bmax y
BA = 0,5 Bmax. Entonces podemos escribir
BR = Bmax + 0,5 Bmax cos (60°) +
0,5 Bmax cos (60°)
Teniendo en cuenta que 0,5 Bmax cos (60°) = 0,25 Bmax , entonces
el resultado final es
eq. 106-01
Es decir, nuevamente encontramos que el módulo del fasor resultante tiene un valor constante igual a 1,5 Bmax .
Figura 106-03
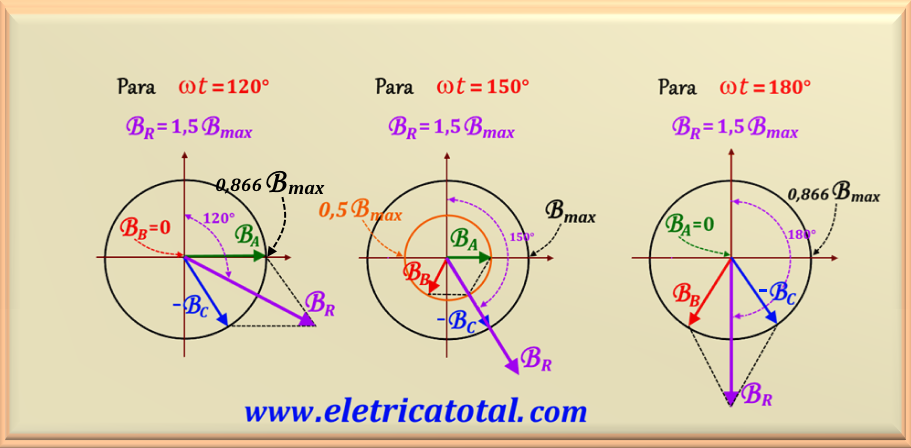
En la Figura 106-04 mostramos la formación del fasor giratorio cuando ωt = 120°,
ωt = 150° y ωt = 180°. A partir de este momento presentaremos las gráficas de formación del
fasor rotatorio, sin muchas explicaciones adicionales, ya que los gráficos se explican por sí mismos.
Por el bien de la didáctica, y por este tema no se encuentra en la mayoría de los libros que tratan sobre máquinas,
mostraremos los doce gráficos para que el lector pueda comprender cómo se procesa la formación del campo giratorio.
Es sumamente importante entender esta parte para que el lector puede entender cómo una máquina puede entrar en el proceso de rotación.
Figura 106-04
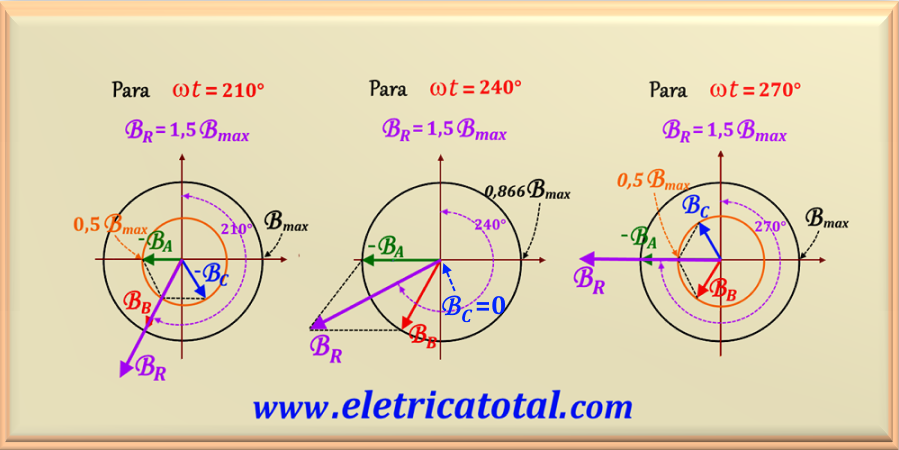
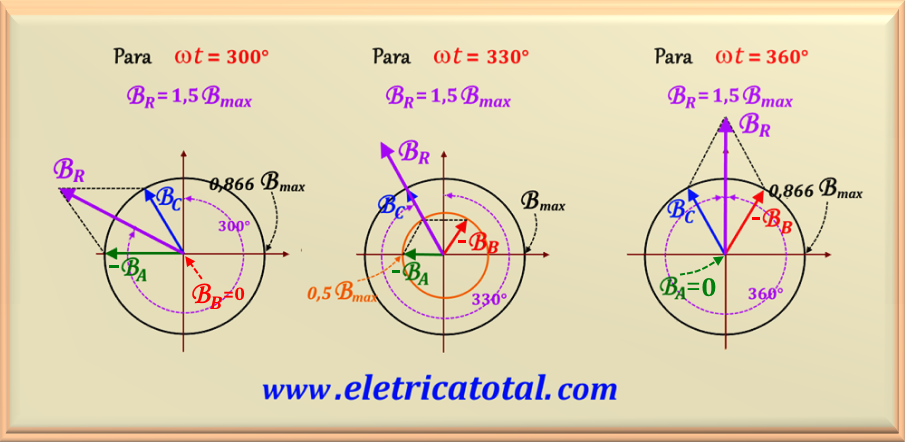
Figura 106-05 Figura 106-06
De hecho, presentamos 13 gráficos, incluido el de ωt = 360° para que el lector entienda que
los gráficos primero y decimotercero son absolutamente iguales y muestran una rotación completa del fasor giratorio.
Para los ángulos posteriores habrá una repetición de lo anterior. Ten en cuenta que aquí te presentamos los trece ángulos
principales para tener una comprensión completa de cómo el fasor resultante gira 360°. Es claro que para un sistema
de potencia que opera a una frecuencia de red de 60 Hz, el fasor giratorio realizará 60 vueltas completas
por segundo. Si el frecuencia era 50 Hz, entonces sería 50 vueltas completas por segundo.
Como dijimos anteriormente en el ítem 3(para ver Haga clic aquí!)
, el motor síncrono no tiene la posibilidad de arrancar simplemente aplicando tensiones de trabajo. Recuerde que el rotor del
motor síncrono está constituido por varias láminas de hierro de silicio yuxtapuestos para formar un volumen considerable.
Como consecuencia, este rotor tiene una masa de valor razonable. Esto genera un momento de inércia. Y,
como sabemos, para cambiar la inercia de un cuerpo debemos aplicar una fuerza de manera adecuada. Cuanto mayor sea el momento
inercia, mayor debe ser el valor de la fuerza.
Imagine un motor síncrono en reposo. Conectamos una tensión DC en el devanado de campo y un conjunto trifásico
de voltaje AC en el devanado del estator produciendo un flujo magnético trifásico de corrientes en los devanados.
Como estudiamos en el punto anterior, este procedimiento creará un campo de inducción
imán rotatorio uniforme, al que llamaremos BS. Por lo tanto, hay dos campos magnéticos presentes
en la máquina y el campo del rotor tenderá
para alinear con el campo del estator. Dado que el campo magnético del estator está girando, el campo magnético del rotor
(y el propio rotor) intentará constantemente póngase en fila. Cuanto mayor sea el ángulo entre los dos campos magnéticos
(hasta cierto valor máximo), mayor será el conjugado en el rotor de la máquina.
El rotor del motor es estacionario y por tanto el campo magnético producido por el rotor, que llamaremos
BR, está estacionario.
El campo magnético BS del estator está girando
dentro del motor a velocidad síncrona. Sin embargo, el motor síncrono no arranca. ¿Por qué?
Para entender lo que está pasando, analicemos la ecuación del conjugado inducido en la máquina por los dos campos
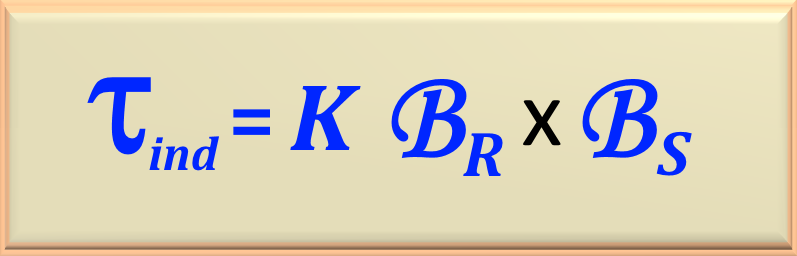
imanes existentes. La ecuacion es mostrado abajo. Ver el eq. 106-02.
eq. 106-02
Donde las variables involucradas son:
τind - Torque o par inducido en la máquina;
K - Constante constructiva de la máquina;
BR - Campo magnético de inducción del rotor;
BS - Campo de inducción magnética del estator.
Observa que en esta ecuación hay un producto vectorial. La eq. 106-03 presenta esta misma ecuación en su forma escalar.
eq. 106-03
Donde las variables involucradas son:
τind - Torque o par inducido en la máquina;
K - Constante constructiva de la máquina;
BR - Campo magnético de inducción del rotor;
BS - Campo de inducción magnética del estator.
θ - Ángulo entre BR y BS
Figura 106-07
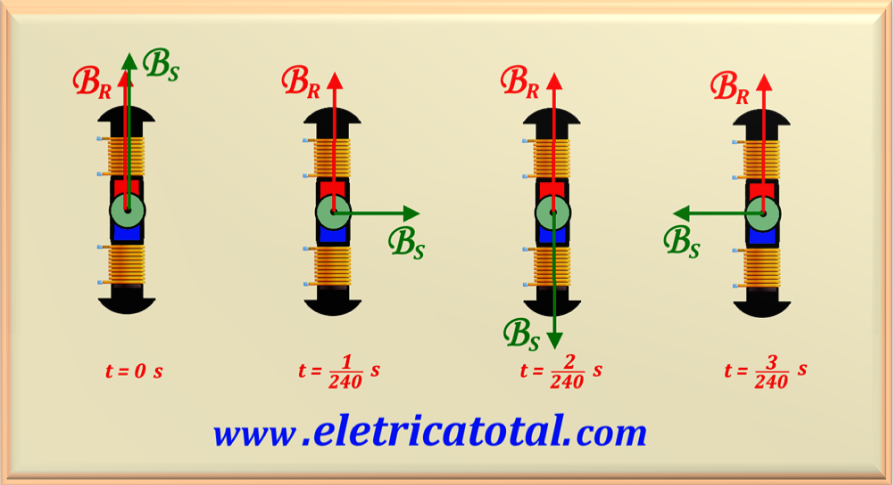
Comencemos nuestro análisis asumiendo una red con una frecuencia de 60 Hz y observando la Figura 106-07.
En la figura mostramos el rotor con su devanado de campo y el cambio de fase entre el campo de inducción magnética del rotor,
BR, y el campo de inducción magnética del estator, BS, para diferentes
instantes de tiempo. Suponemos que el rotor de la máquina está parado.
En el instante t = 0 s, cuando conectamos las tensiones en los devanados, tenemos alineados los dos fasores de campo, es decir,
el ángulo entre ellos es 0°. Para calcular el par inducido utilizamos la eq. 106-03. Sin embargo, sabemos que sen 0° = 0.
Por tanto, concluimos que el valor del torque inducido, en ese instante, es nulo.
En el instante t = 1/240 s, el campo del estator, BS, es 90° por delante del
campo del rotor BR. En este caso, sen 90° = 1 y tenemos un torque inducido. Según la regla de mano derecha,
el torque está entrando en la página.
Para el caso t = 2/240 s, vemos que el ángulo entre los dos fasores es 180°. Y como sen 180° = 0,
entonces el torque es cero.
Y en el instante t = 3/240 s, el ángulo entre los fasores es 270° y como sen 270° = -1, entonces tenemos uno
torque inducido y según la regla de la mano derecha, el torque sale de la página.
Después de este análisis, nos dimos cuenta que los tiempos son muy cortos y no es posible que el rotor siga la velocidad fasorial
del campo de inducción del estator. Y como consecuencia de lo dicho anteriormente, podemos decir que en un ciclo eléctrico el torque
medio se puede considerar cero. Como resultado, el motor vibra, sin producir giros, y además, se sobrecalienta.
Entonces la pregunta es:
¿Cómo arrancar un motor síncrono?
Para responder a esta pregunta, existen tres alternativas, como se describe a continuación.
Reducción de la velocidad del campo de inducción magnética del estator;
Utilice un motor primario externo;
Utilice devanados amortiguadores.
Estudiaremos por separado cada una de las alternativas.
5.1 Reducción de la Frecuencia del Campo del
Estator
Si el campo magnético del estator de un motor síncrono gira a una velocidad suficientemente baja, no habrá problema
permitir que el rotor acelere y se sincronice con el campo magnético. La velocidad del campo magnético del estator puede
luego incrementarse gradualmente hasta alcanzar una velocidad cercana a la velocidad de sincronismo. Durante este proceso, no debe poner carga en el eje del motor. A partir de ese momento, es posible apagar el sistema de frecuencia variable y encender el devanado del estator al sistema de potencia trifásico. Ahora es posible agregar carga al eje del motor.
Actualmente, los controladores de motor de estado sólido se pueden usar para convertir una frecuencia de entrada constante
en cualquier frecuencia de salida deseada. Con el desarrollo de paquetes de variadores de frecuencia modernos
variable en estado sólido, se hizo perfectamente posible controlar continuamente la frecuencia eléctrica aplicada al motor,
atravesando todos los valores desde una fracción de un hertz hasta por encima de la frecuencia nominal completa. Si
tal unidad de excitación de frecuencia variable está incluida en un circuito de excitación
control del motor para tener control de velocidad, el arranque del motor síncrono se vuelve muy fácil. Solo ajusta el
frecuencia a un valor inicial muy bajo y luego súbalo a la frecuencia de operación deseada para una operación normal.
Cuando un motor síncrono funciona a una velocidad inferior a la nominal, su tensión interna generada
EA será más pequeño de lo normal. Si el valor
de EA se reduce, entonces el voltaje terminal aplicado al motor también debe ser
reducido para mantener la corriente del estator en niveles seguros. El voltaje en cualquier
variador de frecuencia o el circuito de arranque debe variar aproximadamente linealmente con la frecuencia
aplicado.
El convertidor de frecuencia es una unidad de alto costo y debemos analizar cuidadosamente su uso. Sin embargo,
si el motor máquina síncrona tiene que operar a velocidades variables, se recomienda este método.
El segundo método para arrancar un motor síncrono es acoplándolo a un motor de
arranque externo y conducción de la máquina síncrona a la velocidad nominal con el motor externo. Entonces la máquina
síncrona puede colocarse en paralelo con el sistema de
potencia como generador y el motor de arranque se pueden desacoplar del eje de la máquina. Al alcanzar la velocidad nominal,
el motor de arranque se puede apagar. Una vez que se completa la entrada en paralelo, entonces el motor
síncrono puede recibir carga de la manera normal.
El arrancador solo necesita vencer la inercia de la máquina
sincrónico a vacio. No se aplica carga hasta que el motor está en paralelo con el
sistema de potencia. Como sólo hay que vencer la inercia del motor, el
arrancador puede tener una característica nominal mucho más baja que la del motor síncrono.
En muchos motores síncronos, de medianos a grandes, un motor externo
de arranque o el uso de la excitatriz pueden ser las únicas soluciones posibles, ya que
los sistemas de energía a los que están conectados no son capaces de manejar
corrientes de partida necesarias para usar devanados amortiguadores. Los devanados amortiguadores son nuestro próximo tema.
La forma más popular de arrancar un motor síncrono es usar devanados amortiguadores. Estos devanados son barras
especiales colocados en ranuras cortadas en la cara del rotor de un motor síncrono y luego cortocircuitados en
cada extremo por un gran anillo de cortocircuito.
Suponga inicialmente que el devanado de campo principal del rotor está apagado y que se aplica un conjunto trifásico de voltajes al devanado del estator de esta máquina.
Cuando se aplica potencia inicialmente en el tiempo t = 0 s, suponga que el campo de inducción
BS es vertical. Cuando el campo de inducción magnética BS
gira en sentido contrario a las agujas del reloj, induce un voltaje en las barras del devanado del amortiguador que viene dado por eq. 106-04.
eq. 106-04
Donde las variables involucradas son:
εind - Tensión inducida en la barra;
v - Velocidad de la barra relativa al campo de inducción magnética;
B - Campo de inducción magnética;
L - Longitud de la barra sumergida en el campo de inducción magnética.
Así, cuando el rotor gira, induce un voltaje entre los extremos de la barra. Este voltaje en las barras genera una corriente que producirá un campo de inducción magnética, que llamaremos BW, que interactuará con
el campo de inducción magnética del estator. De esta manera, aparecerá un conjugado inducido resultante en las barras (y en el rotor) de sentido antihorario. El valor del conjugado viene dado por eq. 106-02, ya estudiado (arriba). Continuando con el análisis, concluyamos que, a veces, el campo de inducción magnética es cero, a veces es diferente de cero, pero siempre apunta en la misma dirección.
Esto hace que el conjugado promedio en el rotor sea diferente de cero. Por lo tanto, el rotor puede salir del reposo y
ganar velocidad. Es importante entender que el rotor no puede alcanzar la velocidad síncrona, porque si el rotor está
girando a la misma velocidad que el campo de inducción magnética del estator, la velocidad relativa entre el rotor y
BS
es cero. Ahora, si la velocidad relativa es nula, entonces por eq. 106-04 la tensión inducida en las barras será nula, no generando el campo de inducción magnética BW. Obviamente, por eq. 106-02 el conjugado será cero y no habrá razón para que el rotor siga girando.
En una máquina real, los circuitos de devanado de campo no se pueden abrir
durante el procedimiento de arranque, porque en ese caso, voltajes muy altos
se producirían en ellos durante el partido. Si los devanados de campo
se cortocircuitan durante el arranque, no se producirán tensiones peligrosas y, en realidad, la corriente
campo inducido en él contribuirá con un conjugado adicional al arranque del motor.
Entonces es posible arrancar un motor síncrono con barras amortiguadoras siguiendo este procedimiento:
1 - Desconecte los devanados de campo de su fuente de alimentación de CC y colóquelos
cortocircuitado.
2 - Aplique una tensión trifásica al estator del motor y deje que el rotor acelere hasta
cerca de la velocidad síncrona. No se debe aplicar carga al
eje del motor, de modo que su velocidad puede acercarse a la velocidad síncrona tan cerca
como sea posible.
3 - Conecte el circuito de campo de CC a su fuente de alimentación. Después de hacer esto, el motor
alcanzará la velocidad sincrónica y luego se pueden aplicar cargas a su eje
5.4 Devanados Amortiguadores y Efecto sobreEstabilidad del Motor
Una de las características importantes de los devanados amortiguadores es una mejora significativa en la estabilidad del motor. El campo magnético del estator gira a una velocidad constante nsinc, que cambia sólo si la frecuencia del sistema sufre alguna variación. Si el rotor gira a la velocidad nsync,
los devanados del amortiguador no tendrán ningún voltaje inducido. Si el rotor gira
más lento que nsync, entonces habrá un movimiento relativo entre el rotor y el campo y
se inducirá un campo magnético del estator y un voltaje en los devanados. Este voltaje produce un flujo de corriente, que produce un campo magnético.
La interacción de los dos campos magnéticos producen un par que tiende a aumentar la velocidad de la máquina nuevamente. Por otra parte, si el rotor gira más rápido que el campo
del estator, entonces se producirá un conjugado que intentará reducir la velocidad del rotor. Entonces, el conjugado
producido por devanados amortiguadores acelera las máquinas lentas y ralentiza las máquinas rápidas.
Por lo tanto, estos devanados tienden a amortiguar la carga y otros transitorios
de la máquina. Por esta razón, estos devanados se llaman devanados
amortiguadores. Estos devanados también se utilizan en generadores síncronos que
operan en paralelo con otros generadores de bus infinito. En este caso, los devanados se utilizan en una función de
estabilización. Si un variación de conjugado en el eje del generador, su rotor acelerará momentáneamente o
disminuirá la velocidad y estos cambios se opondrán a los devanados amortiguadores.
Estos devanados mejoran la estabilidad general de los sistemas de energía al reducir los transitorios de energía y
conjugado.
Los devanados amortiguadores son responsables de la mayor parte de la corriente subtransitoria de una máquina síncrona en
condicionesnde falla electrica. Un cortocircuito
a través de las terminales de un generador es simplemente otra forma de transitorio y
los devanados amortiguadores reaccionan muy rápidamente.
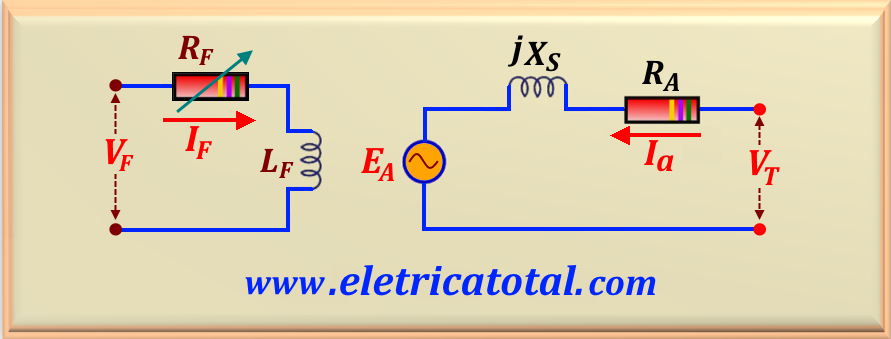
Un motor síncrono es lo mismo que un generador síncrono en todos los aspectos, excepto que se invierte la dirección del flujo de energía. Como este sentido es
invertida, se puede esperar que la dirección del flujo de corriente en el estator también sea
invertido. Por lo tanto, el circuito equivalente de un motor síncrono es exactamente el mismo que el circuito equivalente de un generador síncrono, excepto por el hecho de que la dirección
Ia referencia a invertir. En la Figura 106-08 podemos ver el circuito equivalente de un motor
sincrónico.
Figura 106-08
Por supuesto, un motor síncrono se puede conectar en configuración triángulo o estrella. Como Ia
cambió su significado, por lo que las ecuaciones que gobiernan el motor síncrono también cambian de signo. Entonces nosotros tenemos:
eq. 106-05
eq. 106-06
Es decir, son las mismas ecuaciones estudiadas para un generador síncrono, diferenciándose únicamente por el signo del término de la corriente.
Y para determinar el valor de Ia, a partir de eq. 106-05 llegamos a eq. 106-07, a continuación.
eq. 106-07
El modelo eléctrico de un motor síncrono es el mismo que el de un generador síncrono, diferenciándose por el
sentido de la corriente Ia, ya que esto es opuesto en el motor. Para ver el modelo con más detalle
Haga clic aquí!.
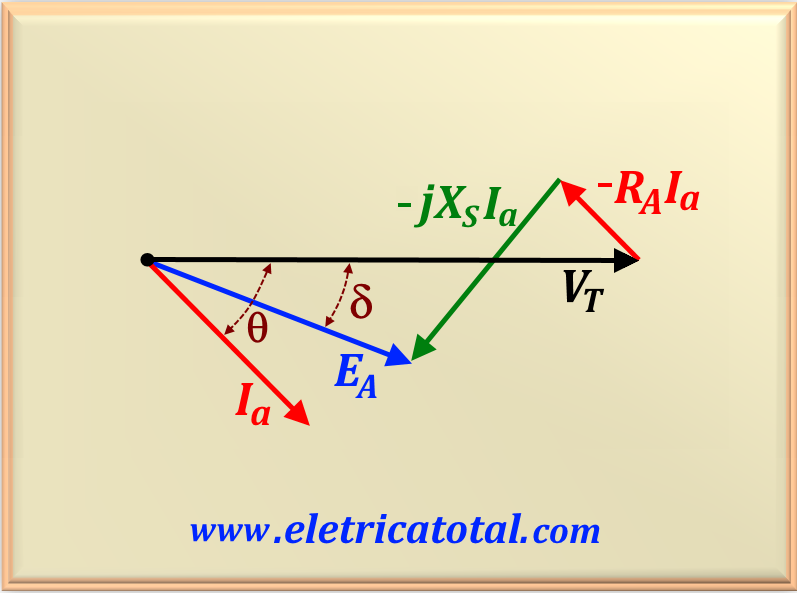
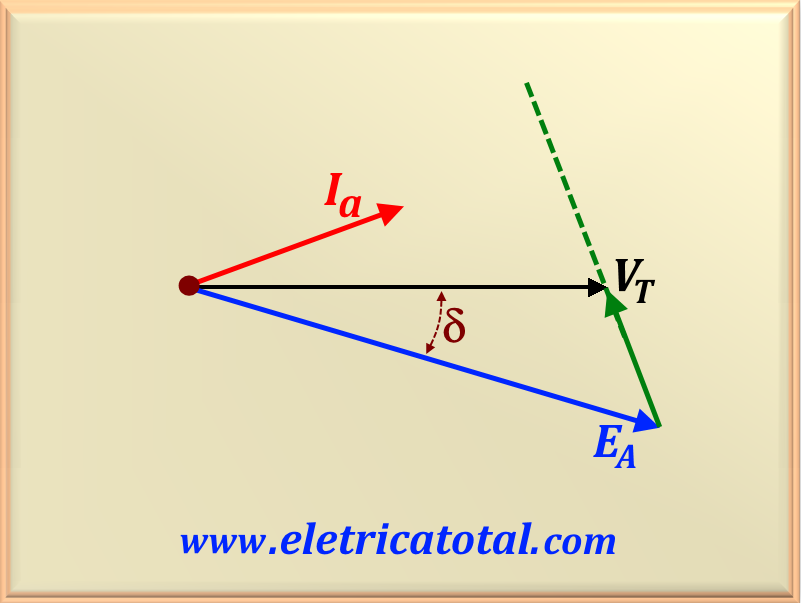
Basándonos en la Figura 106-08, podemos dibujar un diagrama fasorial del motor síncrono como se muestra en
Figura 106-09
Figura 106-09
Con base en el diagrama fasorial que se muestra en la Figura 106-09 podemos escribir que:
eq. 106-08
Nota que eq. 106-08 es una forma alternativa de eq. 106-06. El diagrama anterior muestra que el ángulo de potencia
es negativo y, en consecuencia, la potencia real o activa también es negativa, lo que significa que la máquina extrae
energía de la fuente de alimentación. Es fácil
concluir que cuanto menor es el ángulo de potencia, δ, menor es la transferencia de potencia real o activa.
Los motores síncronos suministran energía a las cargas, que son básicamente dispositivos que funcionan a velocidad constante.
Por lo general, los motores están conectados a sistemas de energía que son mucho más grandes que ellos mismos, de modo que
los sistemas de potencia actúan como buses infinitos para los motores.
Esto significa que el voltaje del terminal y la frecuencia del sistema serán constantes independientemente de la cantidad de potencia demandada por el motor. La velocidad de rotación del
motor está sincronizado con la velocidad de rotación de los campos magnéticos y, a su vez,
la velocidad de rotación de los campos magnéticos aplicados está sincronizada con la frecuencia eléctrica aplicada, de modo que la velocidad del motor síncrono será constante independientemente de la carga.
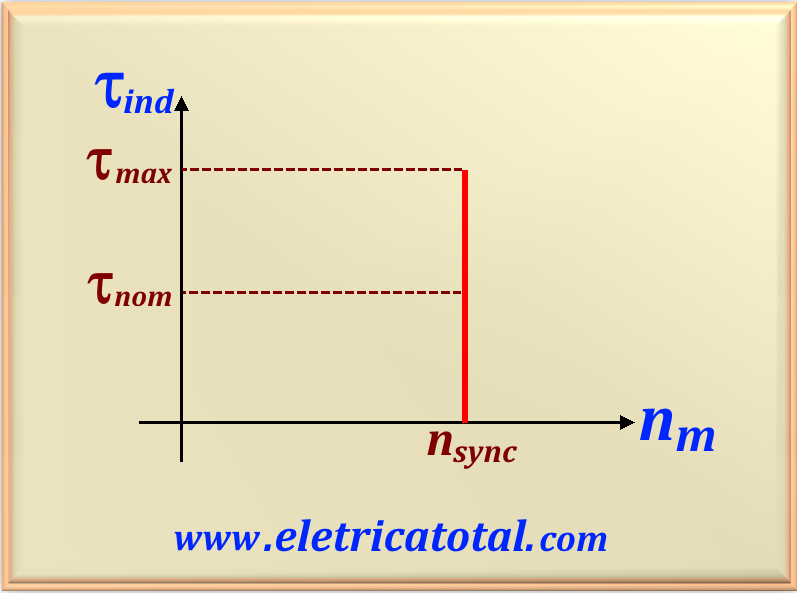
La curva característica de conjugado versus velocidad se muestra en Figura 106-10. La velocidad del régimen
permanente del motor es constante desde el vacío hasta el conjugado máximo que el motor puede suministrar, por lo que
para que la regulación de velocidad de ese motor sea 0 %.
Figura 106-10
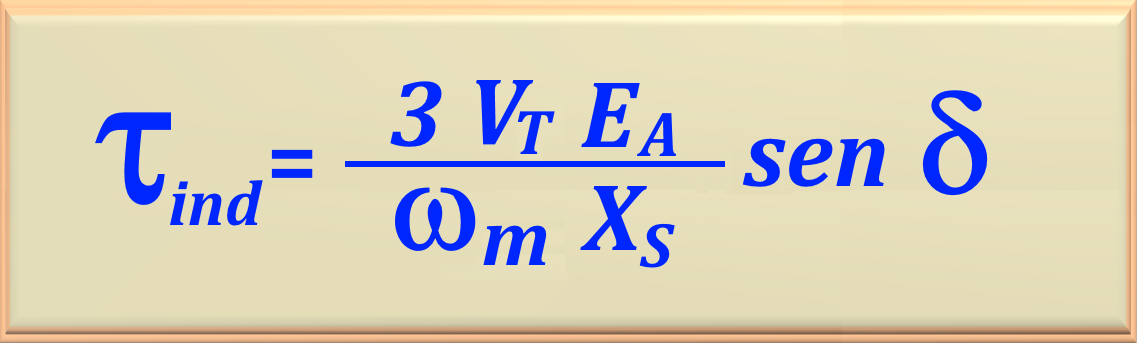
El conjugado en un motor síncrono está dado por eq. 106-09. Tenga en cuenta que el conjugado es directamente proporcional al seno del ángulo de potencia, δ.
eq. 106-09
Nota por eq. 106-09, que el conjugado máximo se produce cuando el ángulo de potencia δ es igual
a 90°, porque sen 90° = 1. Sin embargo, los conjugados normales a
carga completa son mucho más bajos que este valor. De hecho, el conjugado máximo puede ser
típicamente tres veces el conjugado de carga total de la máquina.
Cuando el conjugado del eje de un motor síncrono supera el conjugado máximo, el rotor puede perder el sincronismo con
estator y campos magnéticos netos. En cambio, el rotor comienza a deslizarse, rezagándose. La pérdida de
sincronismo después de que se excede el conjugado máximo se conoce como polos deslizantes.
De eq. 106-09 y en base a la relación de eq. 105-08 (ver aquí!
), podemos escribir la ecuación que calcula la potencia convertida en potencia mecánica en el eje del motor síncrono. Vea
la eq. 106-10, a continuación.
eq. 106-10
Sabemos que cuanto mayor sea la corriente de campo IF, mayor será la tensión inducida EA y,
en consecuencia, mayor será el conjugado desarrollado por el motor. Esto es lo que nos dice eq. 106-09. Así, es posible
concluir que existen ventajas, desde el punto de vista de la estabilidad, cuando se trabaja con altas corrientes de campo IF o,
en consecuencia, con alto voltaje inducido EA.
Supongamos un motor síncrono que gira a velocidad síncrona con una carga dada, inicialmente con un factor de
potencia adelantado, como se muestra en Figura 106-11. En este caso, el motor desarrolla suficiente conjugado para mantener el sistema girando a velocidad síncrona.
Figura 106-11
Ahora, supongamos que hubo un aumento en la carga acoplada al eje del motor. Inicialmente, el motor reducirá su velocidad.
Al hacerlo, el ángulo de torque δ se hace más grande y aumenta el torque inducido. El incremento
en el torque inducido acelerará el motor, que volverá a girar a velocidad síncrona,
pero con un ángulo de torque mayor.
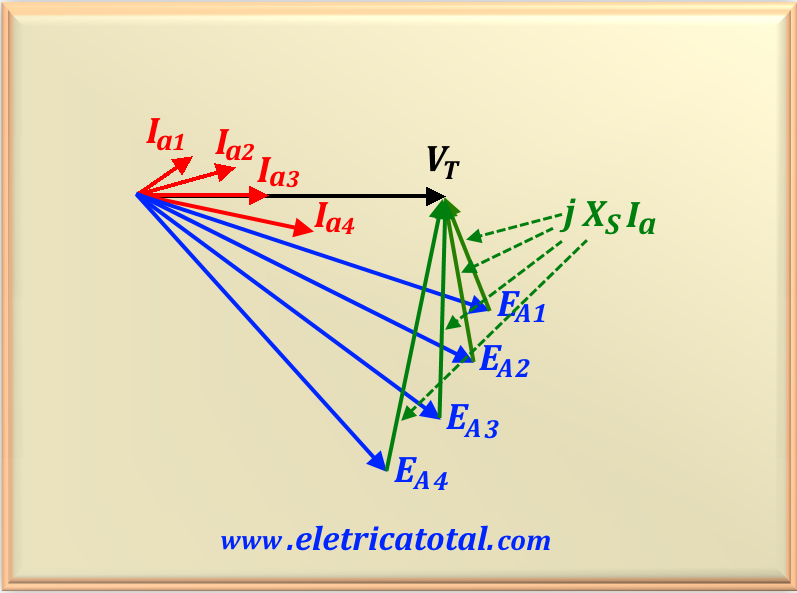
La tensión interna generada EA, dada por eq. 102-02 (ver aquí!), muestra que el voltaje interno solo depende de la corriente de campo (ya que tiene
influencia en el valor del flujo Φ) y la velocidad de la máquina. La velocidad
está condicionado a ser constante por el sistema de alimentación y, como no hubo cambios en el circuito de campo,
la corriente de campo también es constante. Por lo tanto, |EA| debe ser constante cuando
la carga cambia. En el gráfico como se muestra en la Figura 106-12, las longitudes proporcionales
a la potencia (EA sen δ y Ia cos θ) aumentará, pero el módulo de
EA debe permanecer constante. Cuando aumenta la carga,
EA se mueve hacia abajo como se muestra en el gráfico.
Cuando EA se mueve más y más abajo, el término j XS Ia debe
aumentar para que pueda ir desde el final de EA
a VT y, en consecuencia, la corriente de armadura Ia también aumentará. Mirar
que el ángulo θ (ángulo entre Ia y VT) de el factor de potencia también
cambia, cada vez menos temprano y luego más y más atrasado.
Figura 106-12
De todo lo aquí presentado, se puede concluir sobre los efectos del aumento de carga, en condiciones de excitación
constante (sin tener en cuenta los efectos de la reacción de armadura), que:
1 - A medida que crece la carga mecánica, la corriente de armadura Ia aumenta,
independientemente de la excitación.
2 - Si el motor síncrono está sobreexcitado o subexcitado, su factor de potencia tiende a aproximarse a la unidad con el aumento de la carga.
3 - Cuando el motor está sobreexcitado o subexcitado, la variación del factor de potencia es mayor que la variación en la corriente de armadura Ia con la aplicación de la carga.
4 - Cuando el motor está normalmente excitado, la variación en la corriente de armadura Ia
es mayor que el cambio en el factor de potencia cuando aumenta la carga, y el factor de potencia tiende a poner la corriente de armadura más atrasada.
10. Cambios de Corriente de Campo en un MotorSíncrono
En un motor síncrono existe otra magnitud que se puede ajustar fácilmente, a saber, su corriente de campo.
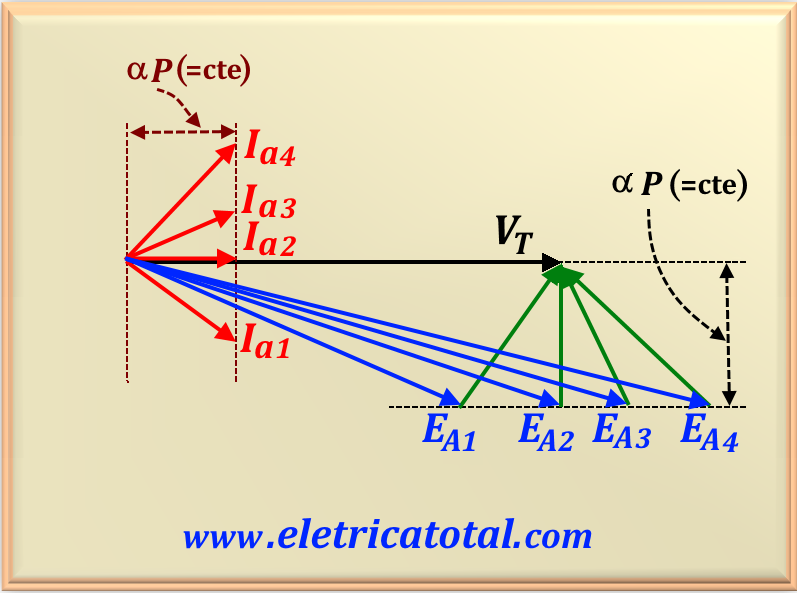
Imaginemos un motor síncrono operando inicialmente con un factor de potencia retrasado, situación 1 como se muestra en Figura 106-13.
Ahora aumentemos la corriente de campo y veamos qué sucede. Tenga en cuenta que un aumento en la corriente de campo genera un elevación en el módulo de EA, pero no afecta a la potencia activa entregado al motor.
La potencia entregada al motor cambia sólo cuando el conjugado de
la carga del eje varía. Dado que un cambio en IF no afecta la velocidad del eje del motor
y, como no cambia la carga acoplada al eje, tampoco cambia la potencia activa suministrada.
Por supuesto, VT también es constante, porque se mantiene así por la fuente de energía que alimenta el
motor. Las longitudes proporcionales a la potencia en el diagrama fasorial (EA sen δ y Ia cos θ) por lo tanto deben ser constantes. Cuando la
corriente de campo
aumenta, el voltaje EA debe aumentar, pero solo puede hacerlo siguiendo las
línea de potencia constante. Este efecto se muestra en Figura 106-13.
Figura 106-13
Motor Síncrono Subexcitado
Cuando la proyección del fasor de voltaje interno EA sobre VT (EA cos
δ) es menor que VT mismo, un motor síncrono tiene una corriente de armadura
retrasado y consume potencia reactiva Q. En este caso, la corriente de campo IF es pequeña y
decimos que el motor está subexcitado.
Esto significa que el motor síncrono es una combinación de inductor y resistencia (caso de EA1 y
Ia1 en el gráfico anterior).
Motor Síncrono Sobre-excitado
Cuando la proyección del fasor de voltaje interno EA sobre VT (EA cos
δ) es mayor que VT mismo, un motor síncrono tiene una corriente de armadura
adelantado y consume potencia reactiva negativa -Q o, lo que es lo mismo, suministra potencia reactiva Q al sistema. En este caso, la corriente de campo IF es grande y decimos que el motor está sobreexcitado.
Esto significa que el motor síncrono es una combinación de condensador y resistencia (caso de EA3 y
Ia3 en el gráfico anterior).
Motor Síncrono con Excitación Normal
Cuando la proyección del fasor de voltaje interno EA sobre VT (EA cos
δ) es igual a VT, un motor síncrono tiene una corriente de armadura en fase con
VT, y consume potencia activa P. En este caso, la corriente de campo IF está en un
valor intermedio entre los dos casos anteriores.
Esto significa que el motor síncrono está funcionando como una resistencia (caso de EA2 y
Ia2 en el gráfico anterior).
Consideraciones Finales
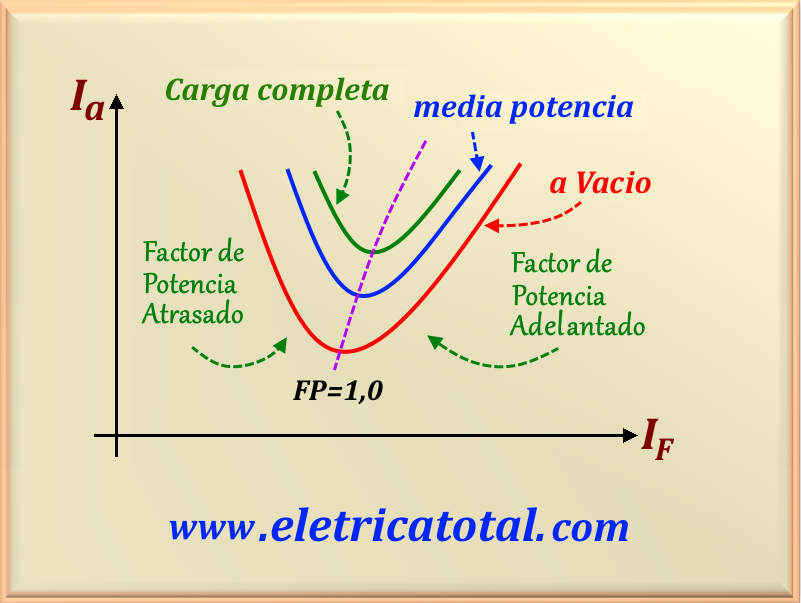
En la Figura 106-14 se muestra un gráfico de Ia frente a IF para un motor síncrono.
Este gráfico se llama la curva V de un motor síncrono, por la razón obvia de que su forma es como la letra V.
Figura 106-14
Hay varias curvas en V dibujadas, correspondientes a
diferentes niveles de potencia activa. Para cada curva, la corriente de armadura mínima Ia
ocurre con factor de potencia unitario, cuando solo se está utilizando potencia activa
suministrado al motor. En cualquier otro punto de la curva, también se suministra algo de potencia reactiva hacia o desde el
motor. Para corrientes de campo más pequeñas
que el valor correspondiente a Ia mínimo, la corriente de armadura está retrasada,
consumiendo potencia reactiva Q. Para corrientes de campo superiores al valor correspondiente a Ia
mínimo, la corriente del inducido está en adelanto, proporcionando potencia reactiva Q al sistema de potencia,
como lo haría un condensador. Por lo tanto, al controlar la corriente de campo de un motor síncrono, podemos controlar la
potencia reactiva suministrada o consumida por el sistema de potencia.
Un motor síncrono, comprado para impulsar una carga, se puede operar sobreexcitado para suministrar energía
reactivo Q para un sistema de potencia. En de hecho, en el pasado, se compraba un motor síncrono para que funcionara sin carga, simplemente para realizar la corrección del factor de potencia.
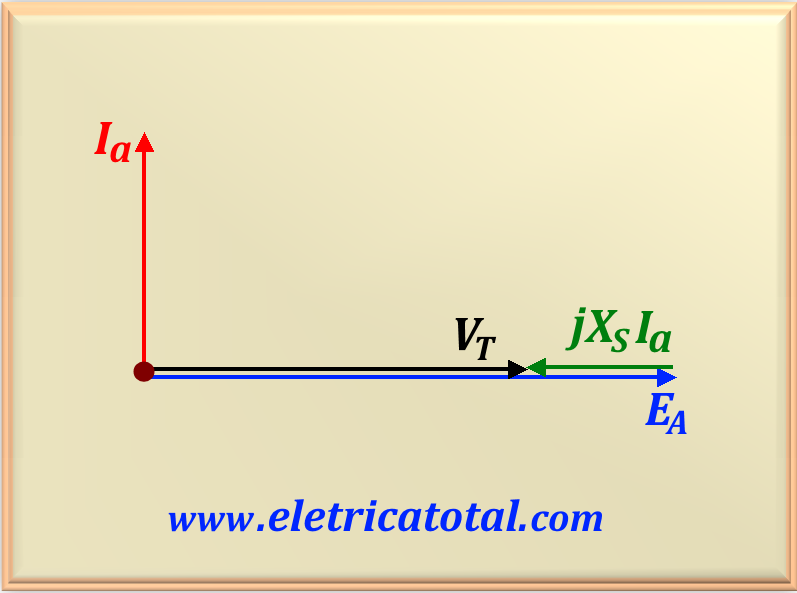
El diagrama fasorial de un motor síncrono, funcionando sobreexcitado sin carga, se muestra en la Figura 106-15.
Figura 106-15
Dado que no se extrae potencia del motor, las longitudes fasoriales proporcionales
a la potencia (EA sen δ y Ia cos θ) son nulos. Sabemos que por la ley de
las tensiones de Kirchhoff para un motor síncrono, considerando que XS >> Ra, viene dada por:
eq. 106-11
El término j XS Ia apuntará hacia la izquierda y por lo tanto la corriente de armadura
Ia señalará hacia arriba. Si se examinan VT y Ia, la relación de voltaje y corriente entre ellos será como de un condensador. Desde el punto de vista del sistema de potencia, un motor
síncrono a vacio sobreexcitado se ve exactamente como un gran condensador.
Algunos motores síncronos solían venderse específicamente para la corrección del factor de potencia. Estas máquinas tenían
ejes que ni salían del bastidor del motor y no se les podría unir ninguna carga, incluso si eso
fue deseado. Estos motores síncronos de propósito especial fueron a menudo
llamados condensadores síncronos.
Actualmente, los capacitores estáticos convencionales son más rentables para comprar y usar que los
condensadores sincrónicos. Sin embargo, es posible que todavía se utilicen algunos condensadores síncronos en instalaciones industriales viejas.