O maior problema no projeto de motores de indução monofásicos é que, diferentemente das
fontes de potência trifásicas, uma fonte monofásica não produz um campo magnético
girante. Em vez disso, o campo magnético produzido por uma fonte monofásica permanece estacionário em direção
e pulsa com o tempo. Como não há campo magnético
girante no estator, um motor de indução monofásico não tem conjugado de partida. Assim, os motores de indução convencionais não podem funcionar
e surge a necessidade de projetos especiais.
Isso pode ser visto facilmente examinando-se o motor quando seu rotor está
parado. O fluxo do estator da máquina primeiro cresce e então decresce, mas sempre
na mesma direção. Como o campo magnético do estator não gira, não há movimento
relativo entre o campo do estator e as barras do rotor. Portanto, nenhuma tensão é
induzida oriunda do movimento relativo do rotor, nenhuma corrente circula e consequentemente nenhum
conjugado é induzido. Na realidade, uma tensão é induzida nas
barras do rotor pela ação de transformador (dφ/dt) e, como as barras estão em curto-circuito,
há uma corrente circulando no rotor. Entretanto, como esse campo magnético está alinhado com o
campo magnético do estator, nenhum conjugado líquido é
produzido no rotor. Então, quando está parado, o motor assemelha-se a um transformador com um enrolamento
secundário em curto-circuito.
A história do motor de indução é marcada por desafios e inovações significativas.
No final do século XIX, a ausência de um conjugado de partida nos motores de indução monofásicos
representava um obstáculo considerável, limitando sua funcionalidade e aplicabilidade.
Com os sistemas de potência AC monofásicos operando a 133 Hz naquela época, os materiais e técnicas
disponíveis não permitiam a construção de um motor eficiente. Foi apenas com o advento dos sistemas
de potência trifásicos, operando a uma frequência mais baixa de 25 Hz, que os motores de indução
começaram a se tornar viáveis e amplamente adotados a partir de meados da década de 1890. Atualmente,
os motores de indução são essenciais em diversos setores, responsáveis por uma parcela substancial
do consumo de energia nas indústrias e apresentando uma base instalada imensa em todo o mundo.
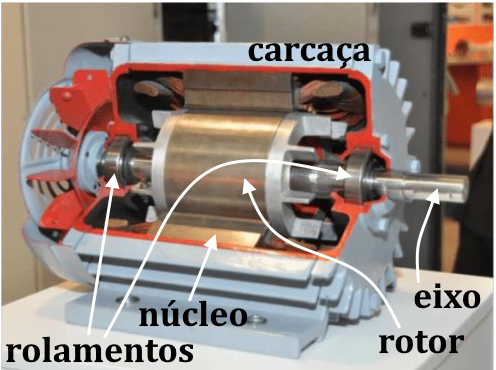
Na Figura 108-01 podemos ver os componentes de um motor de indução monofásico.
Figura 108-01
Há duas teorias básicas que explicam por que um conjugado é induzido no
rotor, tão logo ele comece a girar. Uma é denominada teoria do duplo campo girante
dos motores de indução monofásicos. A outra é denominada teoria do campo cruzado
dos motores de indução monofásicos. Vamos analisar cada uma delas separadamente.
A teoria do duplo campo girante é fundamental para entender o funcionamento dos motores de indução monofásicos.
Ela explica como um campo magnético pulsante, que por si só não é capaz de produzir movimento rotativo contínuo,
pode ser dividido em dois campos girantes que giram em direções opostas. Esses campos interagem com as correntes
induzidas no rotor do motor, gerando forças que se somam e resultam em um torque líquido. Esse torque é o que
efetivamente faz o motor girar. A beleza dessa teoria está na sua simplicidade e elegância, permitindo que motores
mais simples e econômicos sejam construídos sem a necessidade de múltiplas fases de alimentação elétrica.
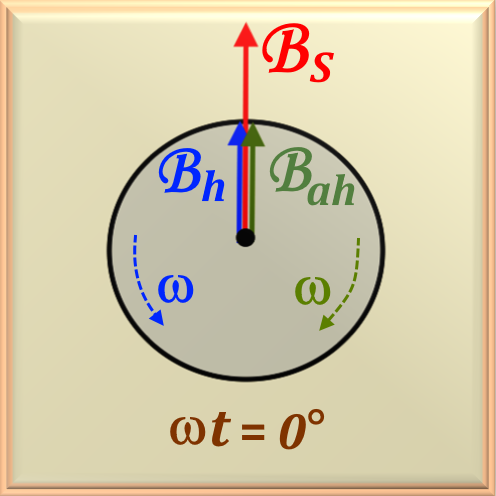
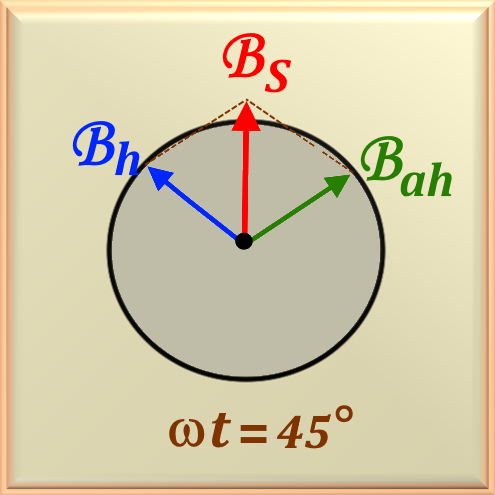
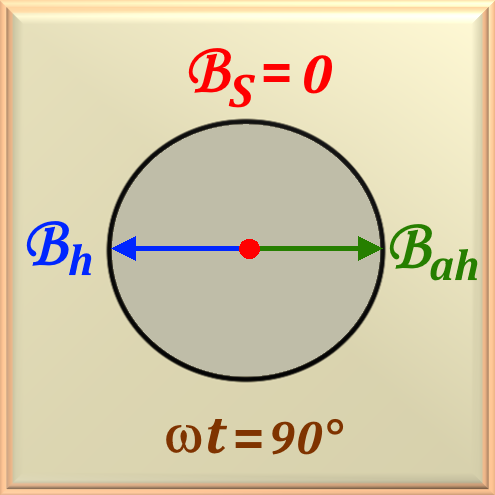
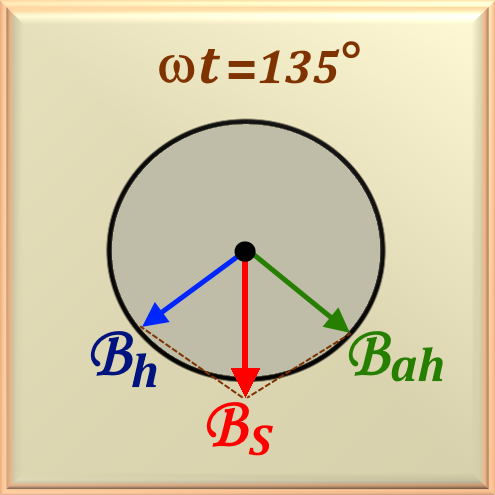
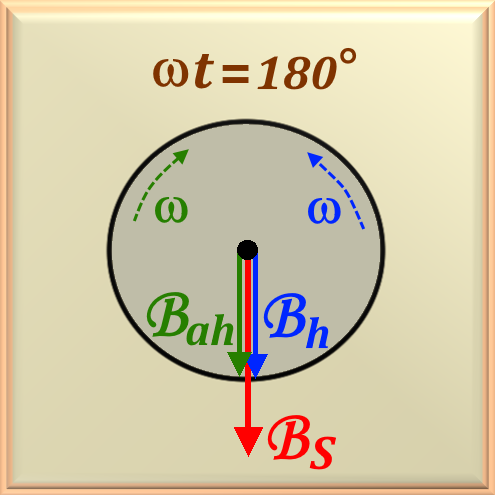
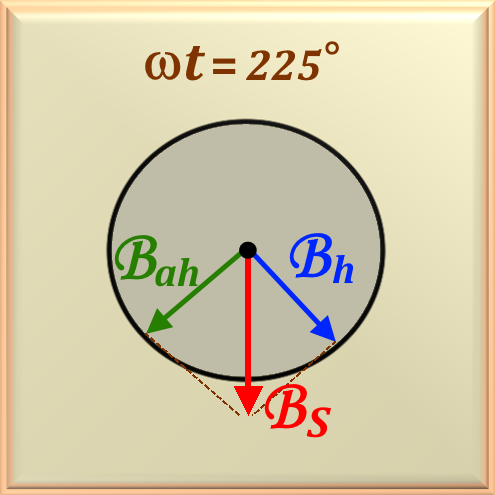
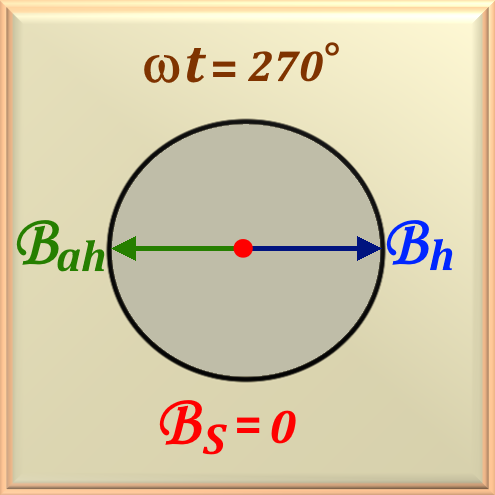
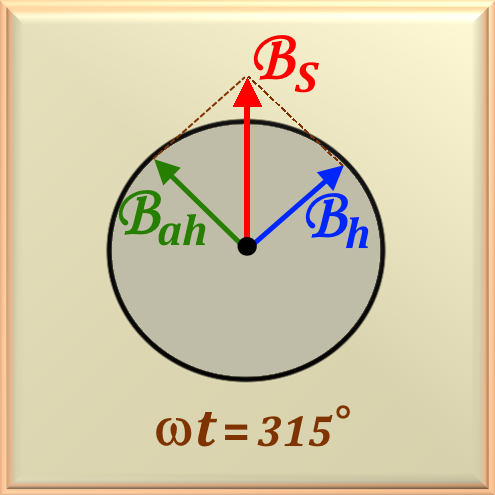
A Figura 108-2 mostra como um campo magnético pulsante estacionário pode
ser decomposto em dois campos magnéticos girantes iguais e opostos (progressivo e
retrógrado). Em qualquer instante,
observe que a soma vetorial dos dois campos magnéticos está sempre em uma linha vertical.
Figura 108-02
A densidade de fluxo do
campo magnético estacionário é dada por
Dessa forma, a decomposição de um campo magnético pulsante em dois campos magnéticos de mesmo
módulo girando em sentidos opostos (campos progressivo e retrógrado) podem ser representados, matematicamente, como um campo
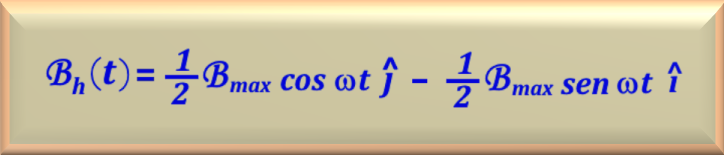
girando no sentido horário e outro no sentido anti-horário. O campo girando no sentido horário, que representaremos por
Bh, pode ser expresso por
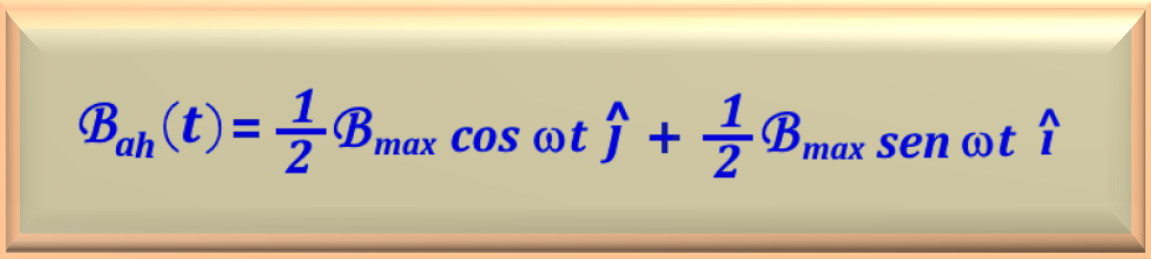
E o campo girando no sentido anti-horário, que representaremos por Bah, é expresso por
Observe que a soma dos campos magnéticos horário e anti-horário é
igual ao campo magnético pulsante estacionário BS, ou seja:
Análise Matemática
Esta análise será feita baseando-nos na Figura 108-02 e lembrando que o eixo horizontal é
representado pelo fasor î e o eixo vertical pelo fasor ĵ.
Analisando para ω t = 0° e sabendo que
sen 0° = 0 e cos 0° = 1, vamos obter as relações Bh = 0,5Bmax ĵ
e
Bah = 0,5 Bmax ĵ. Observe que:
BS = Bh + Bah
= Bmax ĵ
Analisando para ω t = 45° obtemos:
Bh = (0,5)(√2/2) Bmax ĵ - (0,5) (√2/2)
Bmax î
Bah = (0,5)(√2/2) Bmax ĵ +
(0,5) (√2/2) Bmax î
Então, fazendo a soma dos campos obtemos:
BS = Bh + Bah =
√2/2 Bmax ĵ = 0,707 Bmax ĵ
Conclusão:Com essa análise verificamos que o campo resultante, para qualquer ângulo analisado, estará sempre no eixo vertical
ou é nulo, representado pelo fasor ĵ, conforme foi
afirmado anteriormente.
Os campos magnéticos progressivo e retrógrado do motor contribuem cada um com
uma componente da tensão total do estator e, em certo sentido, estão em série entre
si. Como ambos os campos magnéticos estão presentes, o campo magnético girante
progressivo (que tem uma elevada resistência efetiva de rotor R2 / s) irá limitar o fluxo
da corrente do estator no motor (que produz os campos progressivo e retrógrado).
Como a corrente que alimenta o campo magnético retrógrado do estator está limitada
a um valor baixo e como o campo magnético retrógrado do rotor faz um ângulo muito
grande em relação ao campo magnético retrógrado do estator, o conjugado devido
aos campos magnéticos retrógrados será muito pequeno quando se está próximo da
velocidade síncrona. Devemos prestar atenção ao fato que quando alimentamos o motor com uma tensão monofásica,
o rotor continuará estacionário, ou seja, não se moverá, pois como ficou evidente nas considerações anteriores
o torque a que o rotor está submetido é igual a zero.
No entanto, por qualquer meio, se providenciarmos um giro inicial ao rotor isso fará com que os campos magnéticos
progressivo e retrógrado sejam de intensidades diferentes ocasionando o surgimento de um torque diferente de zero.
Com isso o motor consegue acelerar até alcançar sua velocidade de trabalho.
Isso se deve principalmente que a onda progressiva de
fluxo no entreferro cresce e a onda retrógrada diminui quando o rotor é colocado em
movimento. Quando o motor está funcionando com um escorregamento reduzido, o efeito refletido da resistência do rotor sobre
o campo progressivo, 0,5 R2 / s, é significativamente maior do que o valor observado com o rotor parado, ao passo que o efeito no campo
retrógrado, 0,5 R2 / (2 -s), é menor.
Assim sendo, a impedância do campo progressivo é maior do que a do rotor parado, enquanto a do campo retrógrado é menor.
Dessa forma, a força contra-eletromotriz do campo progressivo é maior do que a do rotor parado, ao contrário da força
contra-eletromotriz do campo retrógrado, que é menor. Ou seja, a onda progressiva de fluxo cresce, ao passo que a onda retrógrada de fluxo diminui.
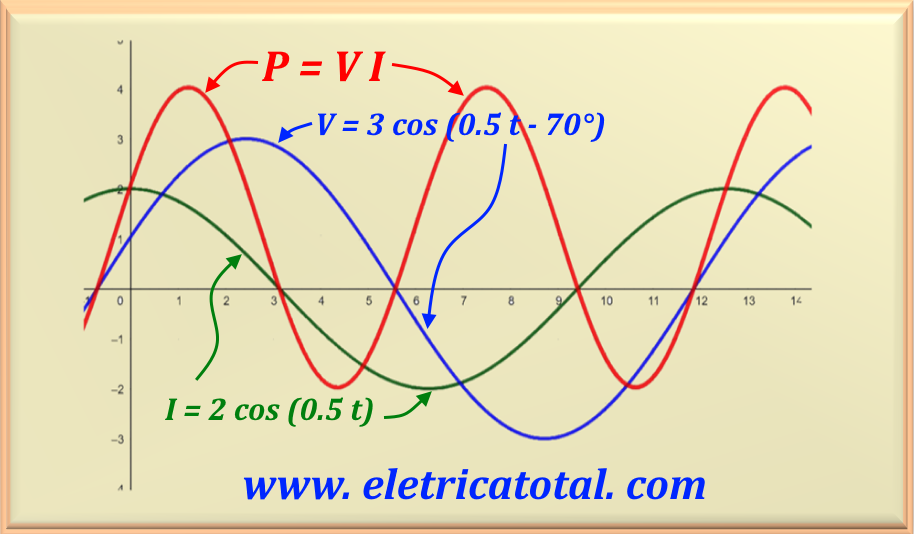
Além do conjugado líquido médio, há pulsações de
conjugado com o dobro da frequência do estator. Essas pulsações de conjugado ocorrem quando os campos magnéticos
progressivo e retrógrado cruzam-se duas vezes
a cada ciclo. Assim, para um motor alimentado com uma rede cuja frequência é de 50 Hz, apresentará uma pulsação de 100 Hz. E no caso da rede
de 60 Hz a pulsação será de 120 Hz. A Figura 108-03 mostra essa situação. Usamos como referência a potência pois sabemos que existe
uma relação direta entre potência e torque. Embora essas pulsações não produzam conjugado médio, elas intensificam de fato a vibração do motor,
o que torna os motores de indução monofásicos
mais ruidosos do que os motores trifásicos de mesmo tamanho. Não há maneira de se
eliminar essas pulsações, porque em um circuito monofásico a potência instantânea
sempre ocorre em pulsos.
Assuma que o rotor do motor está girando na direção do campo que, por sua vez, gira no sentido progressivo (anti-horário) a uma
velocidade n (rpm). Vamos representar a velocidade síncrona como nS. Então o escorregamento sp
para o campo progressivo é dado por
eq. 108-01
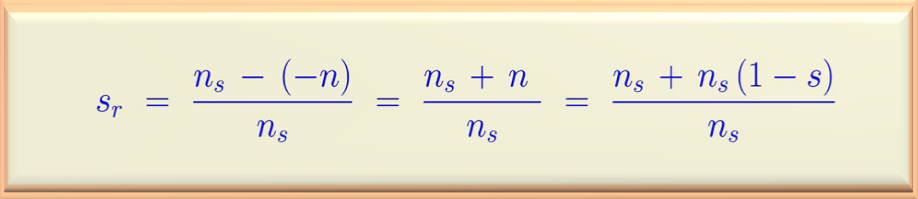
Agora suponha que o rotor do motor gira no sentido retrógado (horário).
Então, o escorregamento sr para o campo retrógado em relação ao campo progressivo é dado por
eq. 108-02
Logo, desenvolvendo algebricamente a equação acima, o escorregamento sr para o campo retrógado é dado por
Trata-se de uma teoria entre as tensões e correntes que o campo magnético estacionário do estator pode induzir nas barras do
rotor quando este está em movimento.
Considere um motor de indução monofásico com um rotor que foi levado até a
velocidade de operação por meio de algum método externo. As tensões são induzidas nas barras desse rotor, com a tensão de
pico ocorrendo nos enrolamentos que passam diretamente abaixo dos enrolamentos
do estator. Por sua vez, essas tensões produzem um fluxo de corrente no rotor que,
devido à sua elevada reatância, está atrasada em relação à tensão em quase 90°. Como
o rotor está girando próximo da velocidade síncrona, esse intervalo de tempo de 90°
na corrente produz um deslocamento angular de quase 90° entre o plano da tensão de
pico do rotor e o plano da corrente de pico.
O campo magnético do rotor é menor do que o campo magnético do estator
devido às perdas no rotor, mas eles diferem entre si em aproximadamente 90° tanto
no espaço como no tempo. Se esses dois campos magnéticos forem adicionados em
instantes diferentes, veremos que o campo magnético total do motor está girando
no sentido anti-horário. Com um campo magnético presente no
motor, o motor de indução desenvolverá um conjugado líquido resultante no sentido
do movimento e esse conjugado manterá o rotor girando.
Se o rotor do motor tivesse sido inicialmente posto a girar no sentido horário,
então o conjugado resultante seria horário e novamente manteria o rotor girando.
A teoria do campo giratório duplo é fundamental para entender o funcionamento dos motores de indução monofásicos.
Quando o estator é alimentado por uma fonte monofásica, ele realmente cria duas ondas magnéticas rotativas de igual
magnitude, mas que giram em direções opostas. Essas ondas são cruciais porque uma delas interage com o rotor para
produzir o torque necessário para a operação do motor. A outra onda, girando no sentido oposto, não contribui para
o torque e pode até mesmo prejudicar a eficiência do motor. Por isso, engenheiros e designers de motores buscam maneiras
de minimizar os efeitos dessa onda contrária para melhorar o desempenho do motor. A análise dessa teoria permite uma
avaliação mais precisa das características de partida e de operação do motor, bem como de sua eficiência e do fator de potência.
A melhor maneira de iniciar a análise de um motor de indução monofásico é
examinando o motor quando ele está parado. Nesse momento, o motor pode ser idealizado como
um transformador monofásico funcionando com o seu circuito secundário em
curto-circuito. Assim, seu circuito equivalente é o de um transformador. Esse circuito
equivalente está mostrado na Figura 108-04.
Figura 108-04
Nesse modelo as variáveis envolvidas são:
R1 - resistência do enrolamento do estator.
X1 - reatância de dispersão do enrolamento do estator.
Xm - reatância de magnetização.
R2 - resistência do rotor referenciada ao estator.
X2 - reatância de dispersão do rotor referenciada ao estator.
V - tensão monofásica de alimentação do estator.
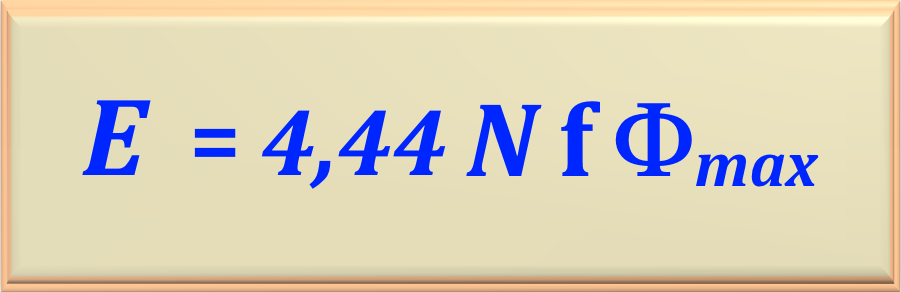
E - tensão induzida no enrolamento do estator pelo ar (ou tensão do entreferro).
É interessante ressaltar que a tensão E é produzida pelo fluxo pulsante estacionário promovido pela
combinação das correntes do estator e do rotor. Observe que estamos supondo o rotor parado. A tensão E produzida é
definida pela eq. 108-04.
eq. 108-04
onde Φmax é o fluxo no entreferro.
A análise do comportamento dos motores elétricos quando parados é fundamental para o entendimento de seu funcionamento
e para a realização de diagnósticos precisos. No caso de um motor parado, o fluxo magnético pulsante no entreferro pode,
de fato, ser dividido em dois campos girantes de igual magnitude, mas em direções opostas. Essa divisão resulta em duas
componentes que interagem com o circuito do rotor, causando quedas de tensão tanto resistivas quanto reativas.
A compreensão dessa interação é crucial, pois permite a divisão do circuito equivalente do rotor em duas partes
que refletem os efeitos de cada campo magnético. Essa divisão é uma aplicação direta da teoria de campo girante,
que é um pilar na análise de máquinas elétricas, especialmente naquelas que operam com corrente alternada.
Além disso, o conceito de entreferro é essencial para o design e a análise de motores, pois é o espaço onde ocorre a
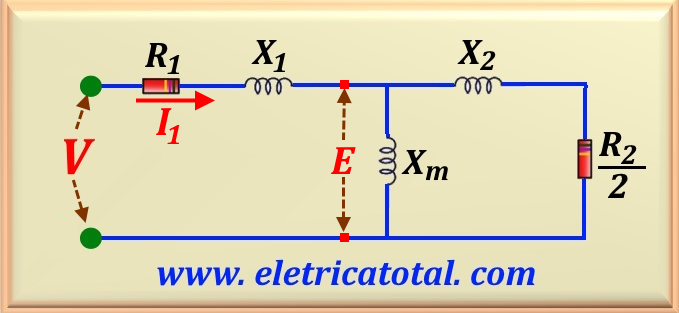
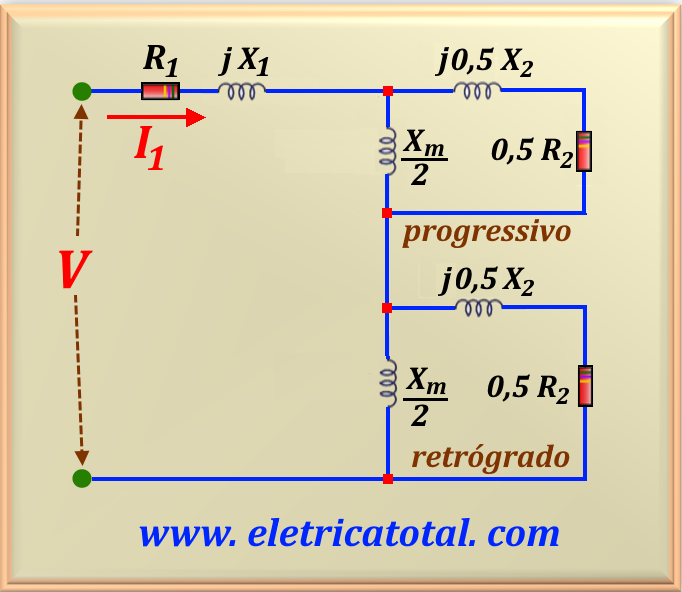
interação magnética entre o estator e o rotor, sendo um fator crítico para a eficiência do motor. É possível dividir o circuito equivalente do rotor em duas seções, cada uma
correspondendo aos efeitos de um dos campos magnéticos. O circuito equivalente do
motor, incluindo a separação dos efeitos devidos aos campos magnéticos progressivo
e retrógrado está sendo mostrado na Figura 108-05. Tenha em mente que com o motor parado o valor do escorregamento
se reduz a s = 1.
Figura 108-05
Dessa forma, as duas metades, na condição de rotor estacionário,
possuem o mesmo escorregamento com respeito a cada campo girante.
A resistência efetiva do rotor em um motor de indução é um fator crucial que influencia o desempenho do motor,
especialmente em relação ao movimento relativo entre os campos magnéticos do rotor e do estator. O campo magnético progressivo,
que gira na mesma direção da rotação do rotor, e o campo magnético retrógrado, que gira na direção oposta, contribuem de maneira
distinta para a resistência do rotor. Quando o motor está em funcionamento, a resistência efetiva do rotor para o campo
progressivo é diferente daquela para o campo retrógrado devido à variação do escorregamento, que é a diferença entre a
velocidade do campo magnético girante e a velocidade real do rotor. Este fenômeno é fundamental para o entendimento do
comportamento dinâmico dos motores de indução e para o desenvolvimento de métodos de controle de velocidade e torque mais
eficientes.
Para o campo magnético progressivo, a diferença por unidade entre a velocidade do rotor e a velocidade do campo magnético
é o escorregamento s, sendo o
escorregamento definido da mesma forma que no motor de indução trifásico. Portanto, a resistência do rotor na parte do circuito
associada com o campo magnético progressivo é 0,5 R2 /s.
O campo magnético progressivo gira na velocidade nsinc e o campo magnético
retrógrado gira na velocidade - nsinc. Portanto, a diferença total de velocidade por
unidade (com base em nsinc) entre os campos magnéticos progressivo e retrógrado é 2.
Como o rotor está girando com uma velocidade s menor do que o campo magnético
progressivo, a diferença total de velocidade por unidade entre o rotor e o campo magnético retrógrado
é 2 - s (veja este resultado na eq. 108-03).
Portanto, a resistência efetiva do rotor na parte do circuito
associada ao campo magnético retrógrado é 0,5 R2 / (2 - s).
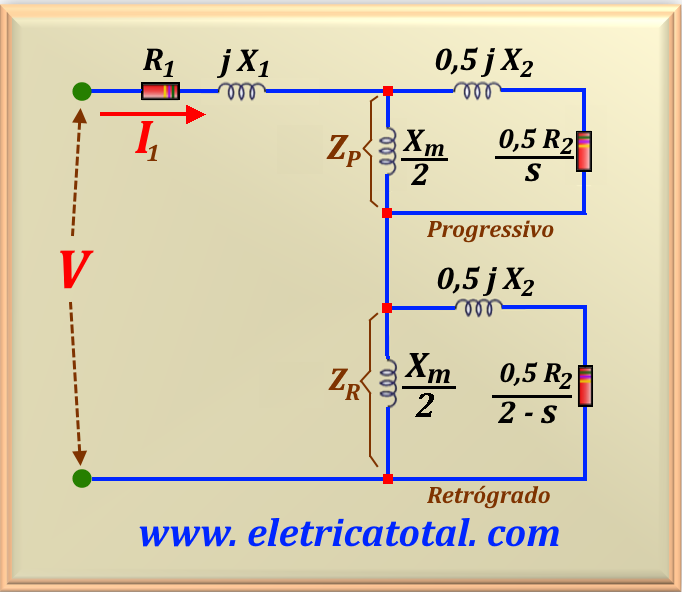
Veja o circuito equivalente final do motor de indução monofásico em movimento na Figura 108-06.
As relações de potência e conjugado em motores elétricos são fundamentais para entender o desempenho e a eficiência dessas máquinas.
Em motores monofásicos, essas relações também são aplicáveis, considerando as componentes progressiva e retrógrada do campo magnético.
A potência líquida de um motor monofásico é a diferença entre as potências associadas a cada um desses campos, enquanto o conjugado
líquido é a diferença entre os conjugados que eles produzem. Este princípio é essencial para o projeto e a análise de motores
monofásicos. Na Figura 108-07 vemos o diagrama torqueversusvelocidade.
Figura 108-07
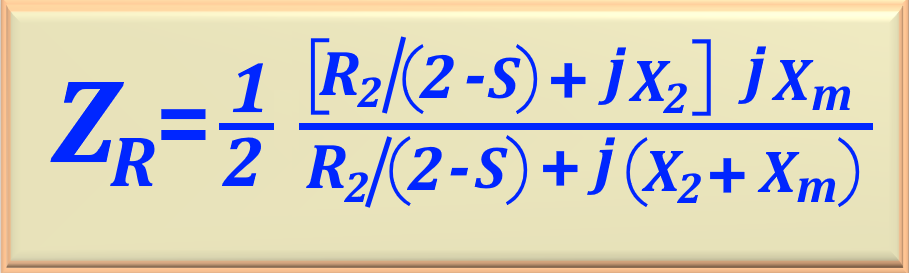
Para tornar mais simples o cálculo da corrente de entrada do motor, é costume
definir as impedâncias ZP e ZR, em que ZP é uma impedância única que equivale
a todos os elementos de impedância do campo magnético progressivo e ZR é uma
impedância única que equivale a todos os elementos de impedância do campo magnético retrógrado . Essa representação está mostrada
na Figura 108-07a.
Figura 108-07a
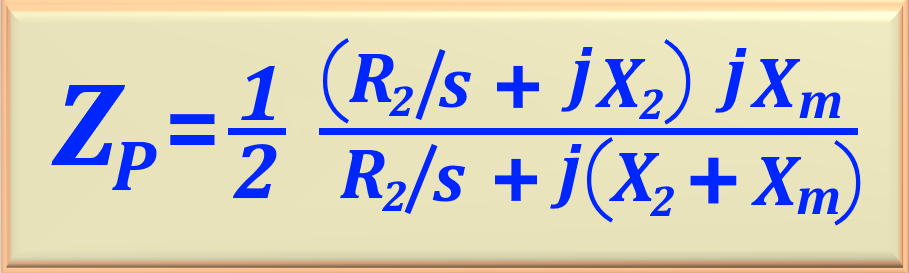
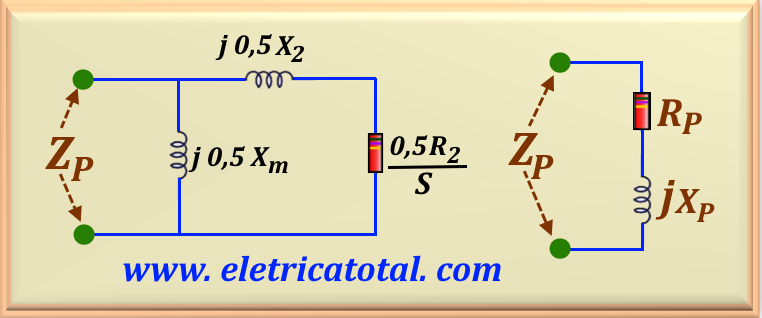
Dessa forma, simplesmente olhando para o circuito mostrado na Figura 108-07a é possível determinar os valores de
ZP e ZR, pois basta verificar que é o cálculo da impedância equivalente representada pelos elementos
que estão conectados em série e paralelo. Assim, usando as eq. 108-05 e eq. 108-06 encontraremos os valores das impedâncias
progressiva e retrógrada.
eq. 108-05
eq. 108-06
Observe atentamente que após o cálculo numérico dos valores de ZP e ZR, olhando essas
equações na forma retangular verificamos que haverá um valor real somado a uma valor imaginário.
Em ZP, a parte real representa a resistência elétrica progressiva, enquanto a parte imaginária
representa a reatância elétrica progressiva. Obviamente, o mesmo é válido quando analisamos a impedância retrógrada.
Esses valores representam o equivalente Thévenin do circuito. Então, é possível escrever:
eq. 108-6a
eq. 108-6b
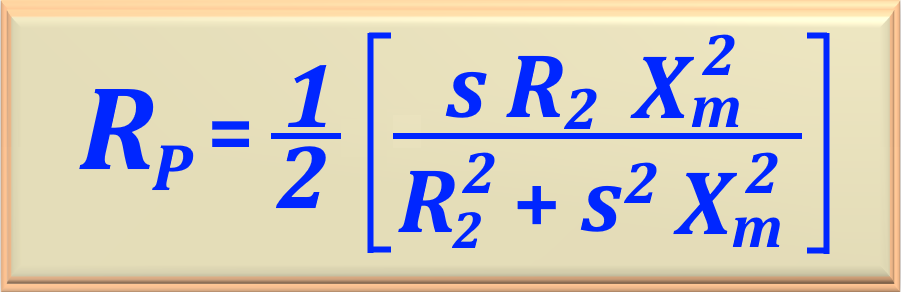
Na Figura 108-08 podemos ver como transformamos o circuito para obtermos RP e XP.
Obviamente, o mesmo é válido quando analisamos a impedância retrógrada.
Figura 108-08
Para completar esta análise, usando a eq. 108-05 e efetuando as operações indicadas na equação, chegamos a um resultado final onde obtemos
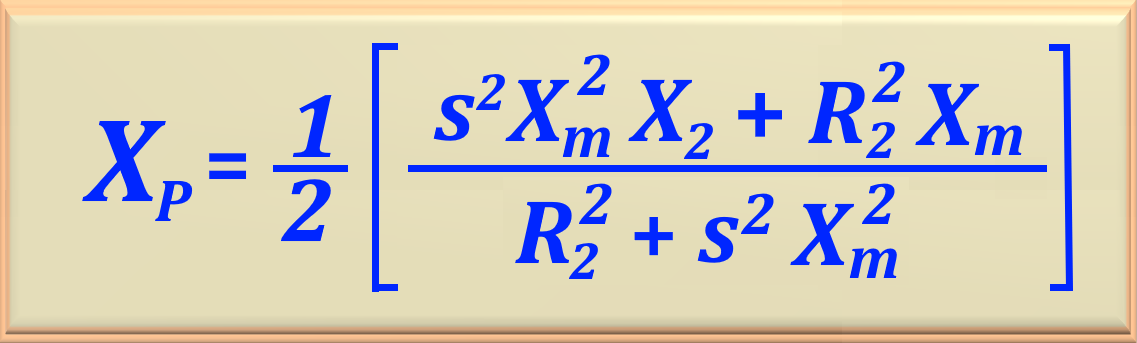
a parte real e a parte imaginária de ZP. Levando em consideração que em geral, Xm >> X2 e, portanto,
podemos escrever Xm + X2 ≈ Xm obtendo os resultados
mostrados nas equações eq. 108-7a e eq. 108-7b.
eq. 108-7a
eq. 108-7b
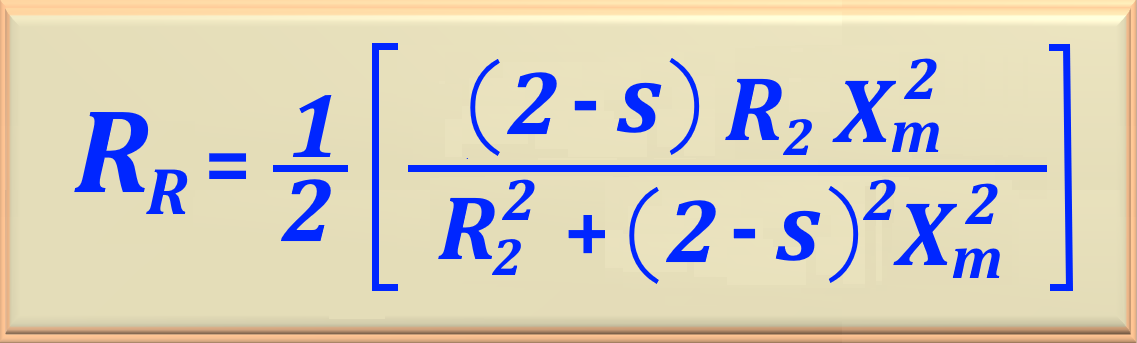
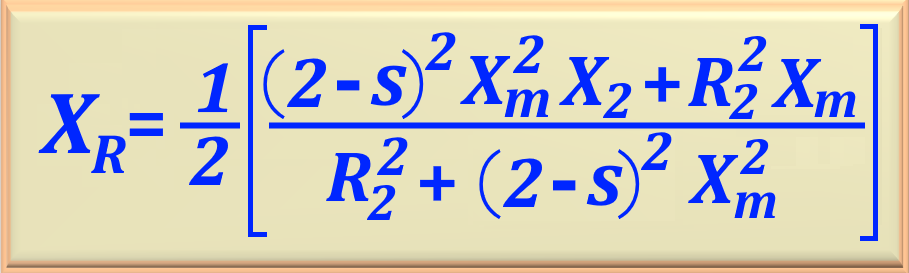
Essas equações são válidas para o campo progressivo. Fazendo o mesmo para o campo retrógrado, partindo da eq. 108-06
e fazendo as operações e simplificações adequadas, chegamos as equações eq. 108-8a e eq. 108-8b.
eq. 108-8a
eq. 108-8b
Nota Importante
"Observe que ao usar estas equações não há necessidade de se trabalhar com números complexos.
Há um pdf disponível mostrando como chegamos a essas equações. Inclusive, compara-se os resultados obtidos com essas equações aos
resultados do exemplo 9-1 do livro do Chapman, página 595, 5ª edição. Caso o leitor tenha interesse em
ler o pdf, basta
Clicar aqui"
Após entendermos a parte teórica envolvida em um motor de indução monofásico, podemos elaborar um estudo para
determinar os vários parâmetros do motor.
Vamos começar determinando a corrente de entrada do motor, representada por I1. Observe que a eq. 108-07 é
obtida do circuito mostrado na Figura 108-06.
eq. 108-09
É importante observar que a potência progressiva de entreferro de um motor de indução monofásico é a potência
consumida por RP, haja vista que o resistor progresivo RP é o único resistor
presente na impedância progressiva ZP. Da mesma forma, a potência retrógrada de entreferro do motor é a potência
consumida por RR. Assim, a potência de entreferro do motor pode ser encontrada calculando-se a diferença
entre a potência consumida por RP e a potência consumida por RR. Para manter uma nomenclatura
compatível com o que foi estudado em motores de indução trifásico, vamos denominar a potência do entreferro por Pgap.
Dessa forma, a potência progressiva no entreferro representaremos por PPgap e a potência regrógrada no entreferro como
PRgap. Então, podemos escrever:
eq. 108-10
Essa equação representa o valor da potência desenvolvida pelo rotor para produzir um torque necessário para a manutenção do giro do rotor.
Essa diferença entre as quantidades PPgap e PRgap, é devido ao fato que os campos progressivos e retrógrados
agem em direções opostas e, como resultado, eles se subtraem. Assim, podemos determinar o quanto dessa potência será transformada em
potência mecânica usando a eq. 108-27 (veja item 4.7). Observe atentamente que PgapNÃO representa as perdas
no cobre do motor devido ao campo progressivo e retrógrado. Essas perdas são fornecidas pela eq. 108-21 (veja item 4.6).
E a potência progressiva no entreferro é dada por:
eq. 108-11
E a potência retrógrada no entreferro é dada por:
eq. 108-12
Substituindo os respectivos valores na eq.108-10 pelas eq. 108-11 e eq. 108-12, obtemos:
eq. 108-13
Nota Importante
"Deve-se atentar para a eq. 108-10, pois essa equação expressa a potência que será transformada em potência
"mecânica" para o rotor. Isto é,
essa potência terá uma relação direta com o torque induzido no rotor do motor, torque este essencial para manter o motor em movimento.
Muitas literaturas técnicas apresentam essa equação,
usando a mesma simbologia, como a soma das duas quantidades e não sua diferença.
Na realidade, essa soma refere-se às perdas elétricas no enrolamento de cobre do motor.
Logo, o leitor deve ficar atento quando o autor afirma que as perdas no cobre são a soma das
perdas no campo progressivo com a do campo retrógrado. Nesse caso, ele está se referindo as perdas "elétricas" e não à
"potência mecânica". Portanto, é essencial que o leitor esteja atento a essas nuances
para evitar confusões e garantir a precisão dos cálculos relacionados ao desempenho do motor. "
Quando estudamos o motor de indução trifásico vimos que o torque induzido no rotor era dado pela eq. 107-32, repetida abaixo para
maior clareza.
eq. 107-32
Observe que usamos a velocidade síncrona em rad/s de acordo com a frequência da
rede que alimenta o motor, pois lembre-se que os campos progressivo e retrógrado giram nessa velocidade.
Também é válido lembrar a relação entre a velocidade síncrona da máquina, o número de polos da máquina
e a frequência da rede, f, dada pela eq 108-14.
eq. 108-14
Dado que os dois campos, progressivo e retrógrado, estão girando em direções opostas, o torque produzido pelos dois campos se opõe.
O torque resultante desenvolvido é, portanto,
eq. 108-15
Usando a eq. 108-13, também é possível expressar o torque como a eq. 108-16.
eq. 108-16
Todas essas equações possibilitam calcular o torque induzido no motor. Quando necessitamos calcular
o torque no eixo do motor, ou seja, quando o motor está sob carga, então devemos usar a
eq. 108-17, abaixo.
eq. 108-17
Para o cálculo de ωr devemos usar a eq. 108-22, abaixo.
Depois de subtrair as perdas de cobre do motor, as perdas de ventilação e fricção, bem como as perdas no núcleo, a
potência de entrada do motor, a potência restante é convertida da forma elétrica para mecânica. Essa potência, conhecida como
potência mecânica pode ser expressa de diversas maneiras. Inicialmente definiremos a relação entre a velocidade angular síncrona
e a velocidade angular do eixo do motor, ωr, que são relacionados pelo deslizamento,
de acordo com eq. 108-22.
eq. 108-22
Assim, fazendo as devidas equivalências, podemos escrever a potência mecânica como:
eq. 108-23
Substituindo a eq. 108-22 na eq. 108-23, obtemos:
eq. 108-24
Substituindo a eq. 108-16 na eq. 108-24, obtemos:
eq. 108-25
E, baseado nas eq. 108-11 e eq. 108-12, também é possível escrever a eq. 108-26, ou:
E, baseado nas eq. 108-11 e eq. 108-12, também é possível escrever a eq. 108-26, ou:
eq. 108-26
Simplificando mais a expressão acima, também podemos escrever que
eq. 108-27
Observe que dependendo dos dados fornecidos no enunciado de problemas temos várias alternativas para calcular a potência mecânica.
A potência nominal de um motor de indução monofásico, indicada na placa de identificação, é um dado crucial para os usuários,
pois representa a capacidade máxima de trabalho do motor sob condições normais de operação. Esta potência, expressa em HP (Horse Power),
pode ser convertida para o sistema internacional de unidades como watts, utilizando a equivalência de que 1 HP é igual a 746 watts.
A potência nominal, ou potência de saída Pnom, é a energia mecânica disponível no eixo do motor, já descontando todas as
perdas inerentes ao funcionamento do motor, incluindo as perdas rotativas. Aqui, vamos simbolizar
as perdas rotativas por Prot, que abrangem as perdas por ventilação,
fricção, no núcleo de ferro e, muitas vezes, as perdas no cobre. Entender esses parâmetros é essencial para a seleção adequada de um motor para qualquer
aplicação específica, garantindo que o motor possa operar de forma eficiente e segura dentro das exigências do sistema em que será integrado.
Dessa forma, é possível escrever a equação da potência nominal conforme a eq. 108-28.
Observe que a potência elétrica (medida em watts) absorvida da rede de alimentação por um motor de indução monofásico, é considerada a
potência de entrada do motor e é dada por:
eq. 108-29
Nessa equação, cos φ representa o fator de potência do motor, ou seja, é a defasagem entre a tensão
aplicada V e a corrente de entrada I1.
Também devemos estar atentos que a potência de entrada da máquina deve satisfazer a eq. 108-30.
O rendimento, η, de um motor de indução monofásico é dado pela razão entre a potência nominal, ou seja, a potência que o motor
disponibiliza em seu eixo e a potência de entrada, ambas medidas em watts ou, outra unidade equivalente. Assim, podemos escrever:
O estudo do circuito equivalente de um motor de indução é fundamental para entender o comportamento da
máquina sob diferentes condições de carga. Para determinar os valores dos elementos do circuito que representam
o motor em operação, é necessário realizar uma série de testes. Estes incluem o ensaio a vazio, que determina as
perdas no ferro e as características de magnetização, e o ensaio de curto-circuito, que fornece informações
sobre as perdas no cobre e a impedância de dispersão. Além disso, o ensaio de rotor bloqueado pode ser usado
para avaliar a resistência e a reatância do rotor quando o motor está parado. Esses testes são análogos aos
realizados em transformadores e são essenciais para a modelagem precisa do motor, permitindo prever seu desempenho
em diversas situações de operação. A análise desses ensaios contribui para a otimização do design do motor,
melhorando sua eficiência e confiabilidade em aplicações práticas.
Quando um motor opera em vazio, ou seja, sem carga, ele consome uma corrente elétrica mínima necessária para vencer as
perdas internas, como as perdas no ferro e as perdas por atrito e ventilação. A condição de vazio é importante para determinar
o comportamento do motor em situações próximas da operação ideal. Durante um teste de vazio, a tensão nominal é aplicada e
a corrente elétrica é medida por um amperímetro conectado em série com o motor, assim como a potência real consumida, que é
indicada pelo wattímetro. Essas medições permitem
calcular as perdas rotacionais do motor, cruciais para entender a eficiência do motor e para projetar sistemas que
utilizam motores elétricos de forma mais eficaz e econômica. Portanto, o teste de vazio é uma ferramenta valiosa na
engenharia elétrica para avaliar o desempenho de motores sob condições controladas.
Devido à alta relutância no entreferro de um motor de indução, a corrente circulante pelo enrolamento
do estator é bem elevada. Assim, a reatância de magnetização, Xm, será bem menor do que
as resistências que estão conectadas em paralelo com essa reatância. Como consequência, o fator
de potência do motor torna-se muito baixo, indicando que a maior parte da corrente fornecida ao motor está fora de
fase com a tensão, contribuindo pouco para a produção de trabalho real. Essa corrente em atraso, predominantemente
indutiva, causa uma queda de tensão significativa nos componentes indutivos do circuito.
Assim sendo, quando o motor está funcionando sem carga, há duas simplificações relevantes a serem feitas. A primeira
é no caso do campo girante progressivo, onde a parcela R2 / 2 s tende a ser um valor muito grande
devido ao pequeno valor do escorregamento.
Então, nesse caso, a eq. 108-33 é válida.
eq. 108-33
A segunda simplificação é no caso do campo girante retrógrado, onde a parcela X2 / 2 + R2 / 2 (s - 2)
é muito pequena quando comparada a Xm / 2, conforme mostra a eq. 108-34.
eq. 108-34
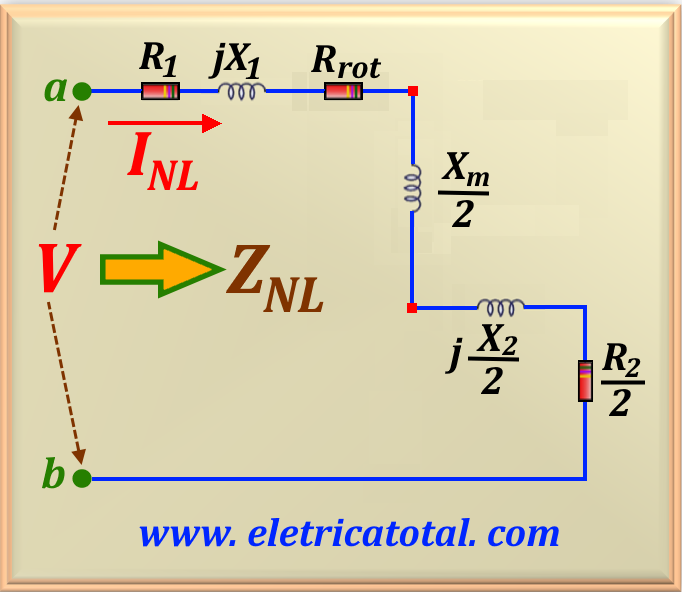
Isso nos permite montar o circuito equivalente para o caso do funcionamento do motor a vazio, conforme mostra
a Figura 108-10.
Figura 108-10
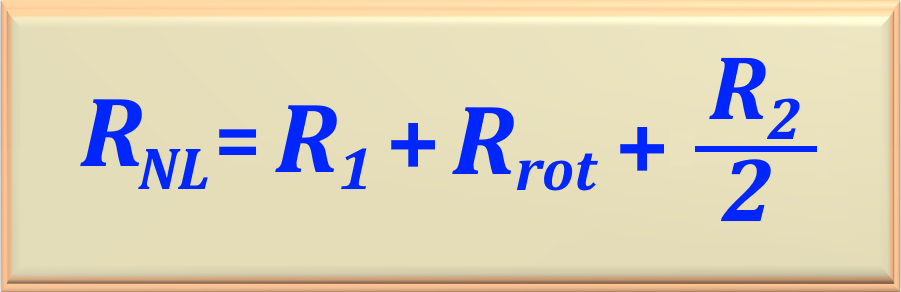
Observa-se que uma resistência denominada "Rrot" foi adicionada ao circuito, cuja finalidade é representar as
perdas rotacionais da máquina. Assim, a potência consumida por essa resistência representa perdas rotacionais,
incluindo as perdas no núcleo de ferro-silício do estator do motor.
A corrente no rotor devido ao fluxo progressivo é bem pequena, dessa forma as perdas no cobre são negligenciadas.
Entretanto, a corrente devido ao fluxo retrógrado é significante, e as perdas no cobre correspondente é representada por
0,5 R2, conforme é mostrado no circuito da Figura 108-10. Portanto, a leitura do wattímettro
corresponde às potências consumidas por R1 + Rrot + 0,5 R2. Essa associação série das resistências
pode ser representada por uma única resistência, que denominaremos de resistência a vazio, cujo símbolo
representativo é RNL. Veja a eq. 108-35.
eq. 108-35
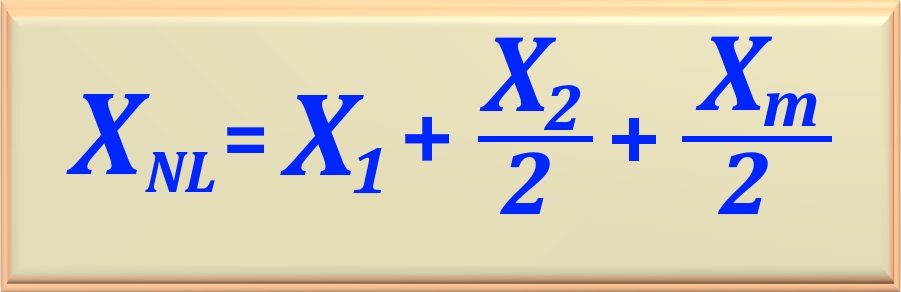
Da mesma forma que foi feito para a resistência a vazio, vamos definir uma reatância a vazio, conforme
podemos deduzir do circuito mostrado na Figura 108-10. Repesentando por XNL, essa
reatância é definida pela eq. 108-36.
eq. 108-36
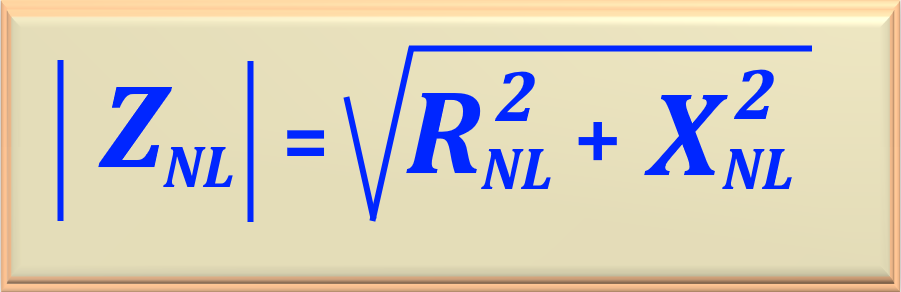
E agora que definimos a resistência a vazio e a reatância a vazio, podemos
definir a impedância a vazio. Repesentando por ZNL e usando a definição usual de impedância, o módulo dessa
impedância é definida pela eq. 108-37.
eq. 108-37
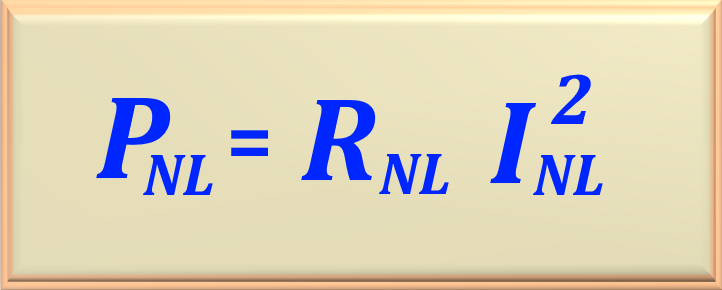
E para finalizar, a potência lida pelo wattímetro representaremos por PNL. Essa potência está relacionada diretamente com
a corrente medida pelo amperímetro e com RNL, conforme a eq. 108-38.
4.11.2 Motor de Indução Monofásicocom Rotor Bloqueado
O método descrito é um procedimento padrão para o teste de curto-circuito em motores elétricos.
A tensão de curto-circuito, VSC, é cuidadosamente controlada para ser menor que a tensão nominal,
evitando dano ao motor devido ao sobreaquecimento. A corrente medida pelo amperímetro durante o teste
deve ser comparável à corrente de plena carga do motor, fornecendo uma indicação da saúde do enrolamento
e da eficiência do motor. Além disso, a condição de rotor bloqueado, onde s = 1, simula uma situação
de máxima carga no motor, permitindo a análise do comportamento do motor sob condições extremas. Este teste
é crucial para garantir a segurança e a confiabilidade dos motores elétricos antes de serem colocados em operação ou após reparos.
Com essa informação é possível refazer o circuito equivalente do motor. Veja a Figura 108-11.
Figure 108-11
Devemos observar que em face do motor estar com o rotor bloqueado e, portanto, s = 1, a resistência R2 / s
reduz-se a R2, que é um valor bem pequeno. Logo, como os valores de R2 e X2
são pequenos, a corrente de entrada do motor, ISC, circulará quase toda por estes componentes, em vez de circular
pela reatância de magnetização, Xm, que possui valor bem mais elevado. Então, podemos dizer que nessas condições
o circuito pode ser considerado como uma série dos componentes R1, X1, R2
e X2. Assim, do circuito mostrado na Figura 108-11, facilmente percebemos que a potência, PSC,
medida pelo wattímetro é dada por:
eq. 108-40
Percebe-se que podemos calcular o fator de potência de forma direta, pois conhecemos as outras variáveis.
Esse dado informa o ângulo de defasagem entre a tensão aplicada, VSC, e a corrente elétrica, ISC.
Do circuito, também é possível concluir que:
eq. 108-41
Outra informação que é possível retirar do circuito é a corrente elétrica, Im, conforme a eq. 108-42.
eq. 108-42
Onde o valor de Zm é dado pela eq. 108-42a.
eq. 108-42a
Agora, conhecendo o valor de ISC e Im, facilmente determinamos o valor de Ir
com o uso da eq. 108-41. E conhecendo o valor de Ir, podemos determinar a impedância formada
pelo circuito onde circula a corrente Ir. Chamando essa impedância de Zsec (secundária) podemos
expressá-la através da eq. 108-43 na sua forma cartesiana.
eq. 108-43
É importante para a solução de muitos problemas a relação do módulo da impedância com suas respectivas partes
reais e imaginárias. Portanto, devemos prestar muita atenção à eq. 108-44.
eq. 108-44
Outro fato importante que devemos salientar
é que esse método encontra o valor total da resistência, ou seja, R1 + R2. Logo,
para se encontrar o valor de R2 devemos conhecer o valor de R1. Para encontrar o valor de
R1 podemos utilizar o método descrito no item 4.11.3, abaixo.
Cabe ressaltar que, em geral, é consenso estabelecer uma relação entre X1 e X2 de forma
bastante prática, ou X1 = X2.
Outro método muito utilizado para se determinar a resistência elétrica do enrolamento de magnetização do motor, no caso R1,
é com a utilização de uma fonte de tensão DC variável
e um amperímetro DC. Ajusta-se a tensão da fonte DC, VDC, até o amperímetro ler uma corrente, IDC, igual a
corrente nominal do motor.
Com isso, após algum tempo, haverá o aquecimento do enrolamento e o valor da resistência medido estará muito próximo do valor real quando
o motor estiver em operação a plena carga (pois sabemos que a resistência elétrica do enrolamento é função da temperatura).
Sabe-se também
que a reatância do motor é nula quando submetido a corrente contínua, bem como não haverá tensão induzida no rotor. Logo, podemos
determinar R1, haja vista que a única grandeza que limita a corrente no enrolamento é a resistência do estator. Esse valor é dado
pela eq. 108-45.
eq. 108-45
É importante ressaltar que esse método não leva em consideração o efeito pelicular, que é um fenômeno relevante no estudo de correntes alternadas, pois afeta diretamente a distribuição
da corrente elétrica dentro dos condutores. Esse efeito ocorre devido à tendência da corrente se concentrar na
superfície do condutor, aumentando a resistência aparente e, consequentemente, as perdas por efeito Joule.
A intensidade desse efeito está relacionada com a frequência da corrente alternada, a permeabilidade magnética
e a condutividade elétrica do material do condutor. Devido a isso, para frequências mais altas, a profundidade
de penetração da corrente diminui. Isso justifica a aplicação de um fator de correção pelos fabricantes ao valor
de resistência calculado para corrente contínua, conforme a eq. 108-45, a fim de obter uma estimativa mais precisa para sistemas de
corrente alternada. Una variação de 10% a 20% é uma medida prática para compensar o aumento da resistência
devido ao efeito pelicular, garantindo assim a eficiência e segurança dos sistemas elétricos. É essencial que
engenheiros e técnicos considerem esse fenômeno ao projetar e analisar sistemas que operam com corrente alternada,
especialmente em altas frequências.
Os motores de indução monofásicos são amplamente utilizados em aplicações residenciais e comerciais devido ao seu custo relativamente
baixo e simplicidade de design. No entanto, como mencionado, eles não têm torque de partida inerente. Para superar isso, as técnicas
mais comuns incluem o uso de um capacitor de partida, um enrolamento auxiliar de fase dividida e um motor de indução com capacitor
permanente. O capacitor de partida fornece um deslocamento de fase necessário para criar um campo magnético rotativo, que pode iniciar
o movimento do rotor. O enrolamento auxiliar, por outro lado, é energizado apenas durante a partida, proporcionando o torque necessário.
Já o motor com capacitor permanente possui um capacitor que fica conectado ao enrolamento auxiliar durante toda a operação, melhorando o
desempenho do motor em cargas variáveis. Cada uma dessas técnicas tem suas vantagens e limitações, sendo a escolha dependente da
aplicação específica e dos requisitos de torque. Assim, podemos resumir as três técnicas utilizadas na prática.
Enrolamentos de fase dividida.
Enrolamentos com capacitores.
Polos sombreados de estator.
Todas essas técnicas de partida são métodos em que um dos dois campos magnéticos girantes do motor é tornado mais forte do que o outro.
Dessa forma, o rotor recebe um torque de partida em um determinado sentido.
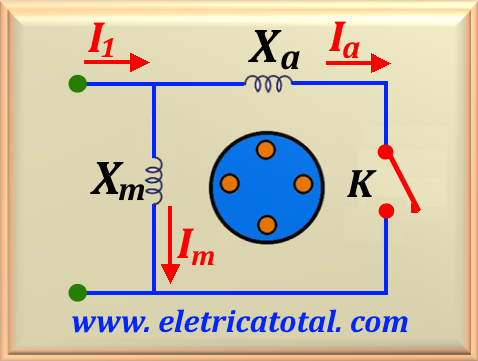
O motor de fase dividida é um tipo clássico de motor de indução, amplamente utilizado em aplicações que não necessitam de
um alto torque de partida. A defasagem de 90° entre os enrolamentos do estator é essencial para criar um campo magnético
giratório, que é o que permite o funcionamento do motor. O enrolamento principal é responsável pela operação contínua,
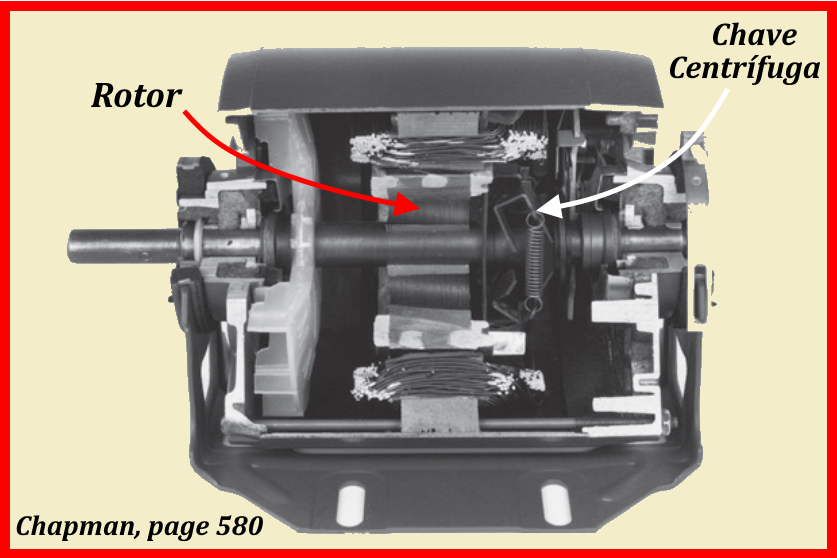
enquanto o enrolamento auxiliar, em conjunto com a chave centrífuga, é utilizado apenas durante a partida para ajudar a
superar o momento de inércia inicial. A chave centrífuga está conectada em série com o enrolamento auxiliar.
Enquanto o motor está parado, a chave centrífuga está
no modo ligada. Nesse caso, os dois enrolamentos estarão recebendo energia da rede
ao se dar partida no motor. Uma vez que o motor atinge cerca de 75% da sua velocidade nominal, a chave centrífuga abre,
desativando o enrolamento auxiliar, permitindo que o motor continue a operar eficientemente com apenas o enrolamento principal.
Veja na Figura 108-12 uma foto da parte interna do motor mostrando a chave centrífuga.
Esta configuração torna o motor de fase dividida uma solução econômica e confiável para muitas máquinas e dispositivos domésticos.
Figura 108-12
Na Figura 108-13 podemos ver um circuito equivalente simplificado desse tipo de motor.
Figura 108-13
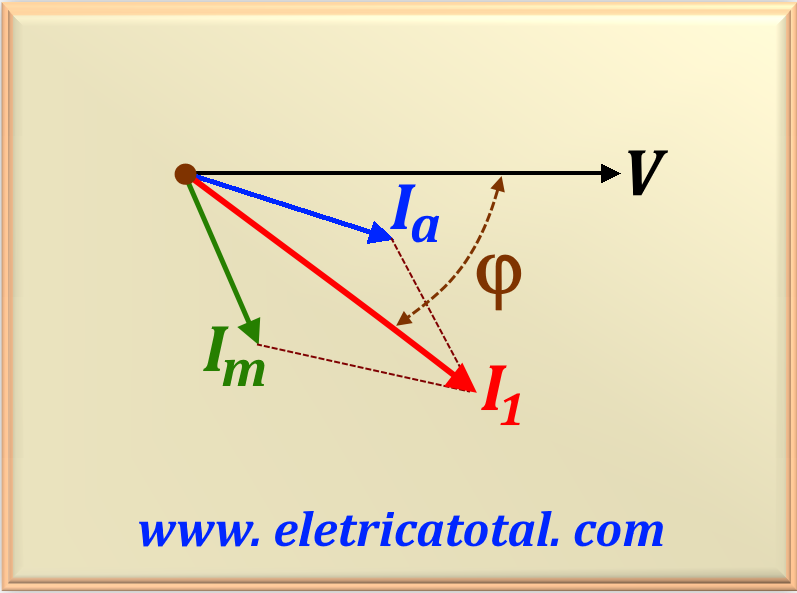
Um fato importante nesse tipo de motor é projetar um enrolamento auxiliar que possua uma razão
resistência/reatância mais elevada que no enrolamento principal. Para se atingir esse objetivo,
normalmente se usa um fio de bitola mais fina para o enrolamento auxiliar.
Isso é possível porque no enrolamento auxiliar só circula corrente elétrica durante a partida. Assim, evita-se uma circulação contínua
da corrente, o que ocasionaria sobreaquecimento do enrolamento. Em virtude da razão mais elevada da resistência/reatância no
enrolamento auxiliar, a corrente elétrica nesse enrolamento sofrerá uma pequena defasagem em relação à tensão aplicada. Já no enrolamento
principal essa defasagegm será bem maior. Como resultado, a corrente no enrolamento auxiliar estará adiantada em relação à
corrente no enrolamento principal. Dessa forma, o enrolamento auxiliar faz com que um dos campos magnéticos girantes opostos do rotor seja
maior do que o outro, produzindo um conjugado de partida líquido para o motor. O gráfico dos fasores mostrado na Figura 108-14
potencializa o que foi afirmado acima.
Figura 108-14
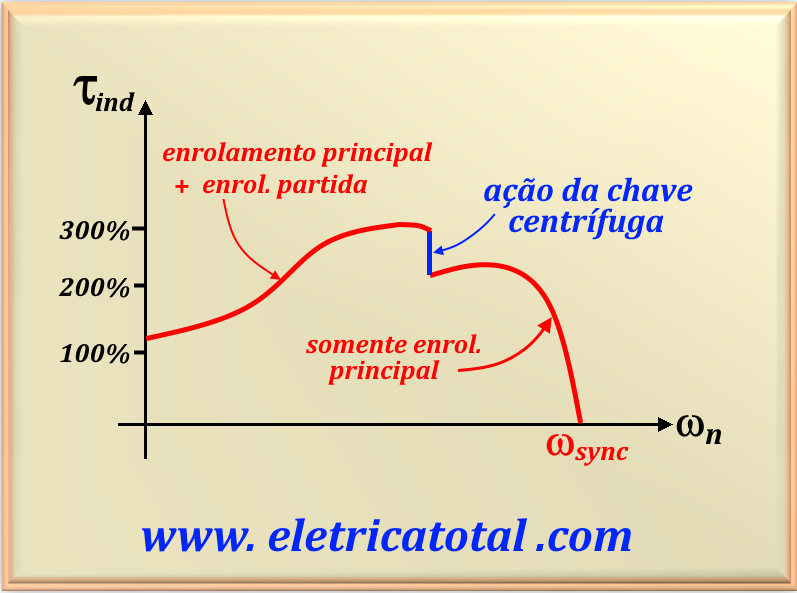
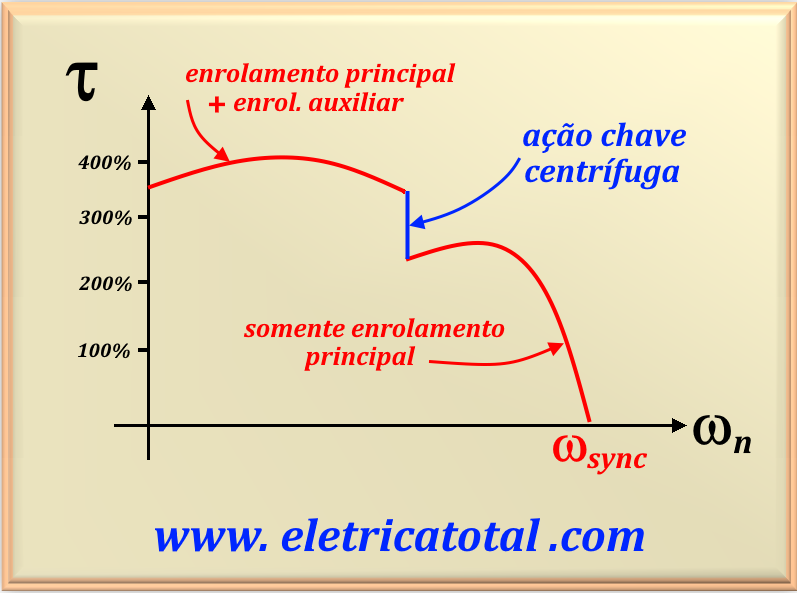
Os motores de fase dividida têm um conjugado de partida moderado com uma corrente de partida baixa. O torque de partida pode ser aumentado
inserindo-se uma resistência em série com o enrolamento auxiliar. Veja na Figura 108-15 o gráfico mostrando o comportamento da
chave centrífuga no torque do motor.
Figura 108-15
Eles são usados em aplicações que não exigem conjugados de partida muito elevados, como ventiladores,
sopradores e bombas centrífugas. Estão disponíveis em tamanhos da faixa de potência fracionária e são bem baratos.
Nota Importante
"O sentido de rotação do motor depende de o
ângulo espacial do campo magnético do enrolamento auxiliar estar 90° à frente ou
90° atrás do ângulo do enrolamento principal. Como esse ângulo pode ser invertido
de 90° adiantado para 90° atrasado simplesmente trocando as ligações do enrolamento auxiliar,
então o sentido de rotação do motor pode ser invertido trocando as
conexões do enrolamento auxiliar, e deixando inalteradas as conexões do enrolamento principal."
O uso de um capacitor de partida em motores elétricos é uma prática comum para melhorar o torque de partida,
especialmente em motores monofásicos. O capacitor, ao ser conectado em série com o enrolamento auxiliar,
cria um desfasamento entre as correntes que fluem através das bobinas do motor. Isso resulta em um campo
magnético rotativo adicional que ajuda o motor a iniciar sua rotação. A capacidade de ajustar a força
magnetomotriz da corrente de partida do enrolamento auxiliar para ser igual à do enrolamento principal
é crucial, pois permite uma partida mais eficiente e suave. Esse método é particularmente útil em aplicações
que exigem um torque de arranque robusto, como ventiladores, bombas e alguns eletrodomésticos. No entanto,
é importante notar que o capacitor deve ser dimensionado corretamente para a aplicação específica, a fim de
evitar falhas prematuras e garantir a eficiência operacional do motor.
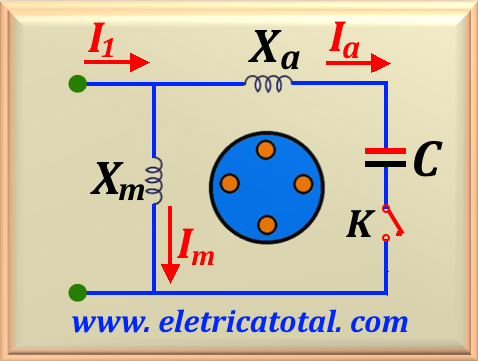
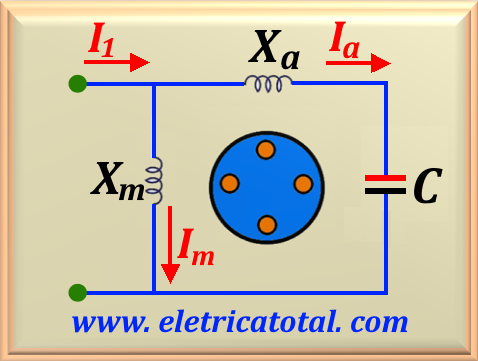
Veja a Figura 108-16. Observe que, com a inserção do capacitor no enrolamento auxiliar,
podemos controlar o quanto a corrente no enrolamento auxiliar estará adiantada em relação à corrente no
enrolamento principal variando a capacitância do capacitor.
Assim, o ângulo de fase da corrente no enrolamento
auxiliar poderá ser tal que a corrente estará adiantada de 90° em relação à corrente
do enrolamento principal. Como os dois enrolamentos estão fisicamente separados
de 90°, uma diferença de fase entre as correntes de 90° produzirá no estator um
campo magnético girante uniforme simples e o motor irá se comportar exatamente
como se ele estivesse partindo com uma fonte de potência trifásica. Nesse caso, o
conjugado de partida do motor pode ser superior a 300% do seu valor nominal. Assim, se o motor de fase
dividida não tem conjugado de partida suficiente para a aplicação a que foi destinado, ele pode
ser substituído por um motor com capacitor de partida.
Aplicações típicas desses motores são em compressores, bombas,
ar condicionado e em outros tipos de equipamento cujas partidas ocorrem com carga.
Figura 108-16
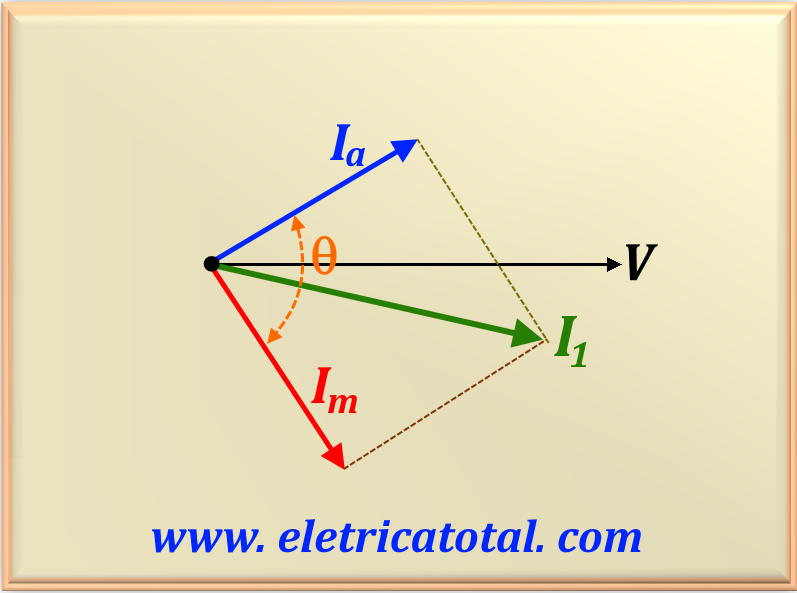
Na Figura 108-17 podemos ver um diagrama dos fasores das correntes envolvidas no processo de geração de torque.
Este tipo de motor apresenta um torque diretamente proporcional ao seno θ, sendo o ângulo θ o
ângulo entre as correntes Im e Ia. Naturalmente que o máximo torque ocorre
quando θ = 90°. Nessa configuração, na partida do motor temos I1 = Im + Ia
Figura 108-17
Para encontrarmos uma equação que defina o torque de partida desse motor usamos a equação eq. 108-15 mostrada abaixo.
eq. 108-15
Definindo a variável a como a razão de espiras entre o enrolamento auxiliar e o enrolamento principal, considerando na
partida o escorregamento s = 1, podemos escrever a seguinte equação para o torque de partida, τst :
eq. 108-46
É comum, na literatura técnica, definir uma nova variável pela letra K, de tal forma que:
eq. 108-47
Então, a equação eq. 108-46 aparece na maior parte da literatura técnica como a eq. 108-48 abaixo.
eq. 108-48
Na Figura 108-18 podemos ver o gráfico do torque desse tipo de motor. Observe o aumento significativo no
torque de partida quando comparado com o torque do motor sem capacitor mostrado na Figura 108-15.
O capacitor de partida faz um trabalho tão bom de melhoria da característica de conjugado versus
velocidade de um motor de indução que algumas vezes o enrolamento
auxiliar com um capacitor menor é deixado permanentemente no circuito do motor.
Se o valor do capacitor for escolhido corretamente, esse motor terá um campo magnético girante perfeitamente
uniforme para alguma carga específica e ele se comportará
exatamente como um motor de indução trifásico naquele ponto. Esse motor é denominado motor com capacitor
permanente. Os motores de capacitor
permanente são mais simples do que os motores com capacitor de partida, porque a
chave de partida não é necessária. Para cargas normais, eles são mais eficientes, tendo
um fator de potência mais elevado e um conjugado mais suave do que os motores de
indução monofásicos ordinários.
Entretanto, os motores com capacitor permanente têm um conjugado de partida
mais baixo do que os motores com capacitor de partida, porque o capacitor deve ser
dimensionado com um certo valor para poder equilibrar as correntes do enrolamento
permanente e do auxiliar em condições normais de carga. Como a corrente de partida
é muito maior do que a corrente de carga normal, um capacitor que equilibra as fases com
cargas normais deixará essas fases muito desequilibradas nas condições de
partida. Na Figura 108-19 vemos um circuito equivalente simplificado desse tipo de motor.
Figura 108-19
Observe que nessa configuração a relação mostrada na eq.108-49 é válida para todo e qualquer instante de funcionamento do motor.
eq. 108-49
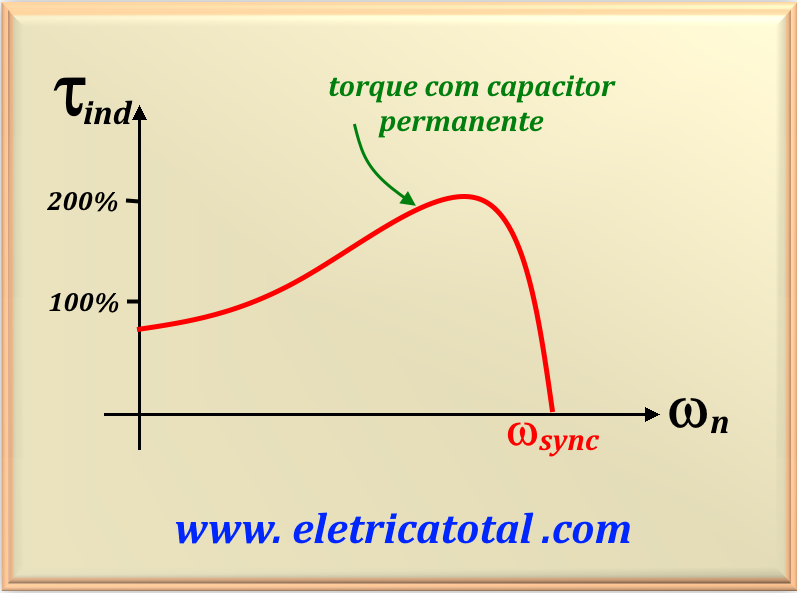
A análise do gráfico de torque de um motor com capacitor permanente, como indicado na Figura 108-20,
revela que o torque de partida não é maximizado. Isso pode ser atribuído a vários fatores, incluindo a
configuração do motor e as características do capacitor. Motores com capacitor permanente são conhecidos
por sua capacidade de manter um torque constante durante a operação, mas o torque de partida pode ser limitado
se o capacitor não for adequadamente dimensionado ou se a configuração do circuito não for otimizada.
Além disso, é importante
garantir que o motor esteja corretamente dimensionado para a aplicação em questão e que todos os componentes
estejam funcionando conforme o esperado. A manutenção regular e o teste dos capacitores podem ajudar a identificar
e corrigir problemas que possam estar afetando o desempenho do motor.
Os motores com dois capacitores são uma solução eficaz para aplicações que exigem um alto torque de partida.
O uso de dois capacitores, um para a partida e outro para a operação contínua, permite que o motor desenvolva
um torque inicial mais forte e melhore a eficiência durante a operação regular. O capacitor de partida, com valor
mais alto, é crucial durante os primeiros momentos após o acionamento, pois trabalha para equilibrar as correntes
entre os enrolamentos principal e auxiliar, resultando em um torque de partida superior. Uma vez que o motor alcança
sua velocidade nominal, o sistema de chave centrífuga desativa o capacitor de partida, deixando apenas o capacitor
permanente em funcionamento. Este último, sendo de menor valor, geralmente entre 10% a 20% do capacitor de partida,
é otimizado para manter o equilíbrio das correntes sob condições normais de carga, garantindo assim uma operação
eficiente e estável do motor. Essa configuração dual de capacitores é particularmente útil em equipamentos que
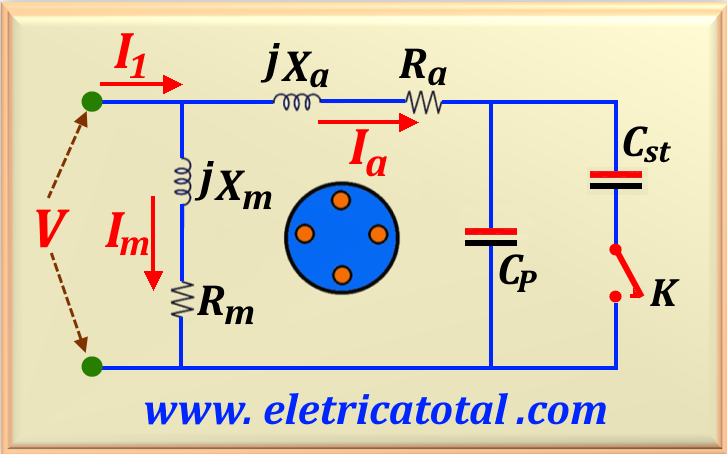
enfrentam cargas pesadas ou que precisam superar uma grande inércia inicial. Veja na Figura 108-21 o
circuito equivalente desse tipo de motor.
Figura 108-21
Os motores monofásicos com duplo capacitor, que incluem um capacitor de partida, Cst, e um capacitor permanente, CP,
oferecem vantagens significativas em termos de desempenho. O capacitor de partida proporciona um aumento substancial no torque inicial, facilitando
a partida do motor sob carga.
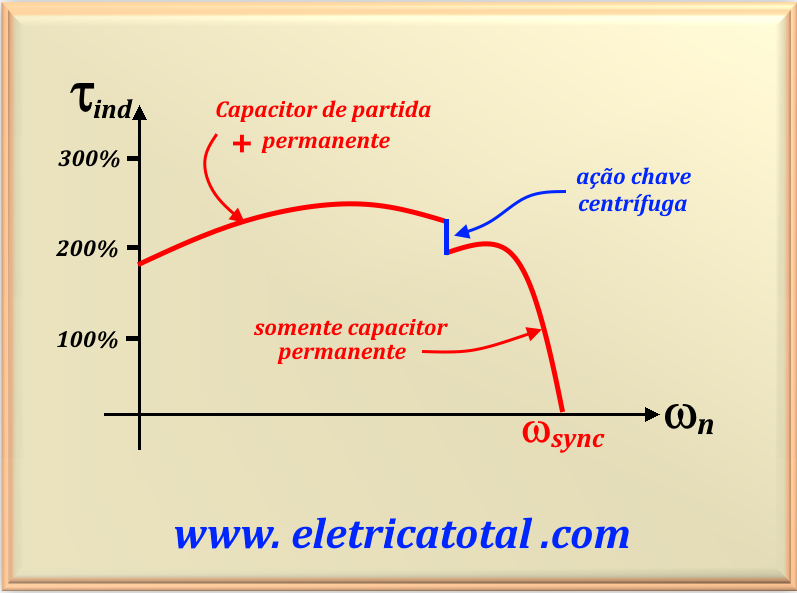
Na Figura 108-22 podemos ver o gráfico do torque desenvolvido pelo motor com dois capacitores. Observe como o
torque de partida é bem maior que o do motor com capacitor permanente.