16. - Determinação dos Parâmetros de um M. I.clique aqui!
No capítulo anterior vimos que os motores síncronos têm aplicação bastante limitada na indústria, principalmente por não possuírem a
capacidade de dar partida sem algum auxílio. Para preencher esta lacuna, surgiu o chamado motor de indução, também conhecido como
máquina assíncrona, isto por que, diferentemente do motor síncrono, não possui a capacidade de girar a uma velocidade síncrona com a
frequência da rede de alimentação. E são chamadas de indução por que a tensão no rotor é
induzida nos enrolamentos do rotor sem a necessidade de uma corrente de campo CC para fazer a máquina funcionar.
Além disso, o motor de indução tem a capacidade de dar partida sem nenhum auxílio externo. A máquina assíncrona também pode funcionar como
gerador. Porém, apresenta muitas desvantagens e seu uso é restrito à aplicações especiais. Neste capítulo, o foco é o
motor de indução trifásico.
Fisicamente, o estator de um motor de indução é semelhante ao de uma máquina síncrona. Basicamente, há
dois tipos diferentes de rotores de motor de indução que podem ser colocados no
interior do estator. São eles:
1 - Rotor gaiola de esquilo
2 - Rotor bobinado
O rotor tipo gaiola de esquilo é um componente essencial em motores de indução, sendo amplamente utilizado devido à sua
robustez e simplicidade de construção. As barras condutoras, geralmente feitas de alumínio ou cobre, são inseridas nas ranhuras
do rotor e curto-circuitadas nas extremidades por anéis de curto-circuito, também feitos dos mesmos materiais. Essa configuração
permite que, quando submetido a um campo magnético variável, gerado pelo estator, o rotor crie um campo magnético próprio por indução.
A interação entre esses campos magnéticos faz com que o rotor gire, seguindo o princípio do motor de indução. A analogia com
a roda de exercício de um esquilo ou hamster ilustra bem a função das barras condutoras, que, ao girarem, transformam energia
elétrica em mecânica, permitindo o funcionamento do motor.
Na parte inferior da foto mostrada na Figura 107-01, vemos o rotor do tipo gaiola de esquilo. Na parte superior,
temos o estator e seu enrolamento. Na parte superior da carcaça, temos os terminais de conexões do motor à rede de alimentação.
Figura 107-01
Por sua vez, o rotor tipo bobinado possui um conjunto
completo de enrolamentos trifásicos que são similares aos enrolamentos do estator. As três fases dos enrolamentos do rotor são usualmente ligadas em estrela e suas três
terminações são conectadas aos anéis deslizantes no eixo do rotor. Os enrolamentos do
rotor são acessados por meio de escovas que se apóiam nos anéis
deslizantes. Para que se obtenha o efeito de indução, os enrolamentos do rotor são curto-circuitados entre si.
Contudo, o curto-circuito dos enrolamentos não é feito diretamente no rotor bobinado e sim através das escovas, externamente.
Portanto, nos motores de indução de rotor bobinado, é possível se fazer modificações como, por exemplo, inserir externamente resistências
extras no circuito do rotor, via escovas. Assim, é possível tirar
proveito desses atributos para modificar a característica de conjugado x velocidade do motor.
Essas resistências introduzidas via escovas, são na realidade reostatos (resistores que podem ter seu valor variado manualmente)
que podem assumir desde um valor máximo até um valor mínimo de forma a limitar a corrente de partida do motor. Assim, é dada a partida no
motor com o reostado em seu valor máximo para obtermos uma pequena corrente de partida. Após o motor partir, reduz-se gradualmente o valor
do reostato até o motor atingir a velocidade nominal. É importante o correto dimensionamento desse reostato pois, além de ser usado para
se dar a partida no motor, também é possível utilizá-lo para controle da velocidade e do torque do motor em seu funcionamento normal.
Os motores de indução de rotor bobinado são de custo maior que o dos motores de indução de gaiola de esquilo. Eles exigem muito mais manutenção devido ao
desgaste associado a suas escovas e anéis deslizantes. Como resultado, os motores de
indução de enrolamento bobinado são usados em casos especiais.
Figura 107-02
Na Figura 107-02 vemos um rotor bobinado com os três anéis deslizantes e as três escovas.
Cabe ressaltar que o estator das máquinas assíncronas é construído utilizando-se lâminas de aço-silício empilhadas
de forma a reduzir as perdas por corrente de Foulcauld e histerese magnética. E o material do rotor é de alta permeabilidade
magnética, a fim de que seja possível a criação de um campo magnético elevado com pequenas forças eletromotrizes induzidas.
O rotor da máquina de indução é normalmente montado
dentro do estator de forma concêntrica, utilizando-se um sistema
de mancais para sustentação da estrutura mecânica da máquina.
Entre o rotor e o estator existe um espaço de ar que é chamado de
entreferro ou gap, onde ocorre a conversão eletromecânica de energia.
Quando o enrolamento do estator é alimentado por uma fonte
trifásica AC, surge nos enrolamentos um campo magnético girante, BS,
que atravessa o entreferro e o rotor, induzindo tensão no rotor (do tipo
bobinado) ou nos condutores curto-circuitados (gaiola de esquilo), fazendo com que a
energização do rotor ocorra apenas por indução. Se o enrolamento do
rotor bobinado for colocado em curto-circuito, perfazendo um circuito
fechado, circularão correntes induzidas que produzirão um campo
magnético no rotor, BR, em oposição ao campo do estator, resultando na
produção de torque e no giro do rotor em uma dada velocidade.
Figura 107-03
Na Figura 107-03 vemos um diagrama onde se mostra o campo girante do estator, BS.
Caso esteja interessado em saber como esse campo girante é produzido pelas três fases da rede elétrica, podes acessar:
Produção de um Campo Magnético GiranteClique Aqui!
Esse campo induz uma tensão nas barras do rotor, que por sua vez produz um fluxo de corrente no rotor, que está atrasado em relação
à tensão de um ângulo θR, devido à indutância do rotor. E essa corrente , IR, produz um campo
indução magnético girante BR que está atrasado de 90° em relação à corrente. Esses dois campos
produzidos interagem entre si resultando um campo resultante, BN, que será o responsável pelo surgimento
de um torque anti-horário, fazendo a máquina acelerar no sentido do torque.
Desta forma, podemos estabelecer a equação do conjugado induzido na máquina através da eq. 107-01, ou:
eq. 107-01
Onde as variáveis envolvidas são:
τind - Conjugado ou torque induzido na máquina;
K - Constante construtiva da máquina;
BR - Campo indução magnético do rotor;
BN - Campo indução magnético líquido resultante.
É possível escrever essa equação em sua forma escalar através da eq. 107-01a .
eq. 107-01a
Quando o motor está operando a vazio, o campo magnético do rotor é muito pequeno, o conjugado induzido também
é muito pequeno, apenas suficientemente grande para superar as perdas rotacionais
do motor. Neste caso, como o estator é o que fornece a maior parte do campo magnético líquido resultante, BN,
então a corrente do estator I1 é bem elevada, mesmo a vazio, pois ela deve fornecer a maior parte de BN.
Essa é a razão pela qual os motores de indução apresentam grandes correntes a
vazio, em comparação com outros tipos de máquinas. A corrente a vazio de um motor
de indução é usualmente 30 a 60% da corrente de plena carga.
Por outro lado, pela Figura 107-03 percebemos que δ = θR + 90°. Assim, levando isso em
consideração é possível escrever
sen δ = sen (θR + 90°) = cos θR. Esse termo é o fator de potência do rotor.
Observação
"Neste momento, é importante perceber que o motor de indução nunca pode alcançar a velocidade síncrona.
Caso isso acontecesse, as barras do rotor estariam estacionárias em relação ao campo do estator, BS.
Nesse caso não haveria tensão induzida nas barras. Consequentemente, o motor perderia velocidade devido ao atrito e demais perdas da máquina,
até parar.
Com isso, concluímos que um motor de indução deve sempre girar a uma velocidade inferior à velocidade síncrona."
Então, podemos dizer que quando um motor de indução está funcionando normalmente, tanto o campo do rotor BR,
como o campo do estator BS, giram juntos na velocidade síncrona, porém o rotor gira a uma velocidade inferior.
Devemos deixar bem claro que a velocidade síncrona estabelecido pelo campo indução magnético BS, depende do
número de polos da máquina. Assim, a velocidade síncrona da máquina pode ser calculada pela eq. 107-02.
eq. 107-02
onde as variáveis envolvidas são:
nsync - velocidade síncrona do campo indução magnético BS;
fS - frequência em Hz do sistema elétrico de alimentação da máquina;
P - número de polos da máquina.
Baseado nessa equação podemos elaborar uma tabela mostrando a relação do número de polos de uma máquina e sua velocidade de
rotação para as duas principais frequências em redes trifásicas.
A tensão induzida nas barras do rotor de um motor de indução depende da velocidade
do rotor em relação aos campos magnéticos. Assim, dois termos são comumente utilizados para definir o movimento
relativo do rotor e dos campos magnéticos. Um deles é a velocidade de escorregamento, nesc, definida como a diferença entre a velocidade síncrona, nsync e a velocidade do rotor, nr, ou:
eq. 107-03
O outro termo usado para descrever o movimento relativo é o escorregamento, normalmente representado por s,
que é a velocidade relativa expressa em uma base por unidade ou porcentagem. Isto é,
o escorregamento é definido como
eq. 107-04
Observe que da eq. 107-03 podemos isolar nr em função do escorregamento e da velocidade síncrona, obtendo:
eq. 107-05
Cabe salientar que podemos obter os mesmos resultados quando substituímos nas equações acima a letra n pela
letra grega ω, onde ω corresponde à velocidade angular dada em rad/s.
Observe que, se o rotor estiver girando na velocidade síncrona, então s = 0, ao passo
que, se o rotor estiver estacionário, então s = 1. Logo, as velocidades normais de um
motor estão entre esses dois limites.
Em um motor de indução, quando a tensão é aplicada aos enrolamentos de estator,
uma tensão é induzida nos enrolamentos do rotor da máquina. Em geral, quanto
maior o movimento relativo entre os campos magnéticos do rotor e do estator, maiores serão a tensão e a frequência do rotor. O movimento relativo máximo ocorre
quando o rotor está parado. Essa condição é denominada rotor bloqueado ou travado,
de modo que a maior tensão e a maior frequência do rotor são induzidas com o rotor
nessa condição. A menor tensão (0 V) e a menor frequência (0 Hz) ocorrem quando
o rotor está se movendo com a mesma velocidade que o campo magnético do estator,
resultando um movimento relativo nulo. O valor e a frequência da tensão induzida no
rotor para qualquer velocidade entre esses extremos é diretamente proporcional ao
escorregamento do rotor. Denominando a tensão induzida no rotor, quando este encontra-se bloqueado, por
EA0, podemos determinar a tensão induzida no rotor para qualquer escorregamento, dada pela
eq. 107-06.
eq. 107-06
Seguindo a mesma linha de raciocínio, podemos dizer que a frequência da tensão induzida no rotor para qualquer escorregamento será dada pela eq. 107-07.
eq. 107-07
Evidentemente o rotor posui um determinado valor de resistência e de reatância. Chamando a resistência do rotor de RR, podemos considerar que ela apresenta um valor constante e é independente do escorregamento. Por sua vez, a reatância do rotor depende de forma mais complexa do escorregamento.
Considerando a indutância do rotor, representada por LR, sabemos que a reatância depende dessa indutância e da frequência do rotor. Então, podemos escrever a eq. 107-08, onde representamos a reatância do rotor como XR.
eq. 107-08
Considerando a eq. 107-07, temos:
eq. 107-09
Sabemos que quando o rotor está bloqueado temos s = 1. Assim, podemos definir a reatância do rotor bloqueado por
XR0 e dada pela eq. 107-10.
eq. 107-10
Portanto, juntando a eq. 107-09 e a eq. 107-10, vamos obter a eq. 107-11 que explicita o valor de
XR em função de XR0 e s, ou seja:
eq. 107-11
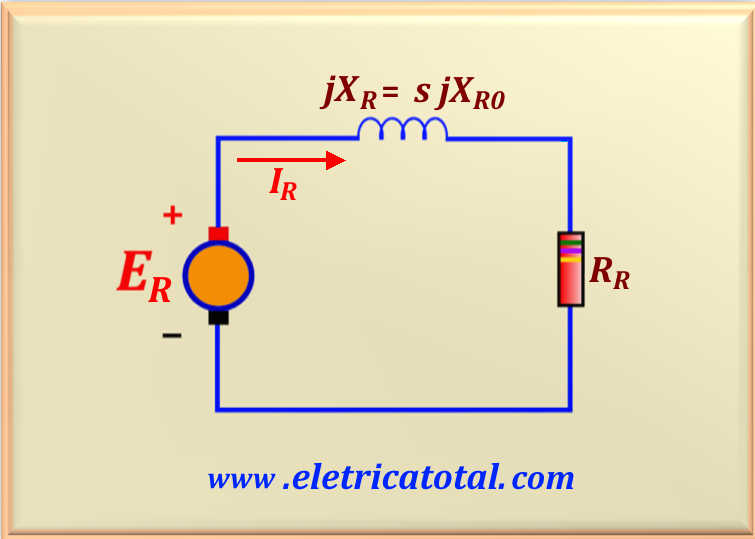
Após a apresentação dessas definições podemos apresentar o modelo elétrico do circuito do rotor conforme
mostra a Figura 107-04.
Figura 107-04
Baseado no modelo elétrico podemos determinar a corrente IR que circula no rotor. Então:
eq. 107-12
Sabendo que ER = s ER0, podemos fazer um arranjo algébrico na eq. 107-12 e escrever:
eq. 107-13
Cabe salientar que as duas equações acima parecem ser a mesma mas não são. Enquanto a primeira (eq. 107-12) está referida à frequência da tensão induzida no rotor (fr), a segunda está referida à frequência do estator
(fs). Ou seja, a eq. 107-13 mostra o que ocorre no rotor quando é "visto" do lado do estator.
E a partir dessa equação podemos refazer o modelo elétrico do rotor conforme mostra a Figura 107-05.
Figura 107-05
Observe que quando o escorregamento é muito baixo, isto é, o rotor gira próximo à velocidade síncrona, o termo resistivo é muito maior que a reatância do rotor, havendo uma predominância da resistência do rotor, e com isso, a corrente varia linearmente com o escorregamento. E quando o escorregamento é elevado, isto é, a máquina gira lentamente (ou está parada), XR0
é muito maior do que RR / s e a corrente do rotor aproxima-se de um valor de regime permanente nesta situação.
Para obter o circuito equivalente final por fase de um motor de indução é necessário
que a parte do rotor no modelo seja referida ao lado do estator. O modelo do circuito do
rotor que será referido para o lado do estator é o modelo mostrado na Figura 107-05, que
tem todos os efeitos de variação de velocidade concentrados no termo de impedância.
Quando estudamos transformadores no Capítulo 91, vimos que era possível referir tensões, correntes e impedâncias
do secundário para o primário através das equações eq. 91-02 e eq. 91-03. Esse mesmo tipo de transformação pode ser aplicada no caso do rotor de um motor de indução. Definindo a relação de transformação efetiva como aef, então a tensão do rotor pode ser expressa como:
eq. 107-14
Dessa mesma forma podemos escrever a corrente do rotor como
eq. 107-15
E a impedância do rotor pode ser definida como
eq. 107-16
E agora vamos adotar as seguintes definições:
eq. 107-17
eq. 107-18
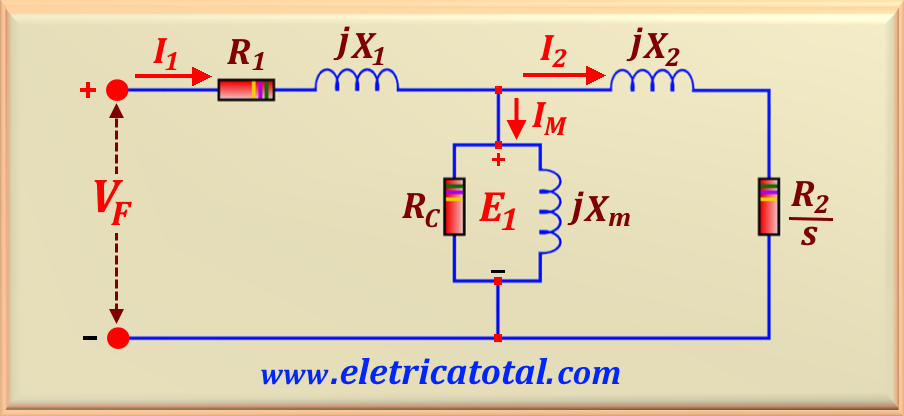
Adotando essas definições acima, estamos aptos a mostrar o modelo elétrico final do motor de indução conforme pode ser visto na Figura 107-06.
Figura 107-06
Na prática é muito difícil conhecer ou medir esses parâmetros do motor de indução tipo gaiola de esquilo. No entanto,
existem métodos práticos para se medir a resistência do rotor, R2, e a reatância, X2.
Apresentaremos esses métodos mais adiante.
Um motor de indução pode ser descrito basicamente como um transformador rotativo. Em um motor de indução comum, os enrolamentos do secundário (rotor) estão em curto-circuito, de modo que não há saída elétrica. Em vez disso, a saída é mecânica.
Ao declararmos a potência nominal de um motor em HP ou em kW, isso significa que essa potência é a potência disponível no eixo do motor, Pn. A potência que o rotor deve desenvolver é a potência nominal, Pn, mais as perdas associadas ao eixo, como as perdas da ventoinha (pois ela está acoplada ao eixo) e as perdas por fricção nos mancais que sustentam o rotor no seu devido lugar. Além disso devemos somar as perdas no cobre do rotor, que vamos denominar por Pjr (perdas joule no rotor). Então, podemos representar a potência que o
rotor deve desenvolver por Pgap. O porquê dessa denominação vamos explicar mais adiante. Dessa forma, podemos escrever:
eq. 107-19
onde as variáveis envolvidas são:
Pn ⇒ é a potência nominal do motor;
Pw ⇒ é a potência referente às perdas da ventoinha or ventilação;
Pfr ⇒ é a potência devido às perdas por fricção ou atrito;
Pjr ⇒ é as perdas joule no cobre do rotor.
Cabe ressaltar que muitos autores costumam reunir em uma única variável a soma das perdas da ventoinha com as perdas de fricção
e passam a denominá-la de perdas rotacionais, representada por Prot. Neste caso, temos
Prot = Pw + Pfr.
As perdas no núcleo de um motor de indução vêm parcialmente do circuito do estator e parcialmente do circuito do rotor.
Como um motor de indução opera normalmente com uma velocidade
próxima da velocidade síncrona, o movimento relativo dos campos magnéticos sobre
a superfície do rotor é muito lento e as perdas no núcleo do rotor são muito pequenas
em comparação com as do estator.
Quanto maior a velocidade de um motor de indução, maiores serão as perdas
por atrito e ventilação . Por outro lado, quanto maior for a velocidade
do rotor (até nsync), menores serão suas perdas no núcleo. Portanto, essas três categorias de perdas são algumas vezes combinadas e denominadas perdas rotacionais. As
perdas rotacionais totais de um motor são frequentemente consideradas constantes
com velocidade variável, porque as diversas perdas variam em sentidos opostos com a
mudança de velocidade.
Depois de analisar o rotor e a potência que o mesmo deve receber para conseguir a potência nominal no eixo do motor, vamos analisar o circuito do estator. Começamos com as perdas joule no enrolamento do estator que, conforme o modelo
da Figura 107-06, é dada por PE = 3 R1 . I12, onde PE são as perdas nas três fases do estator. Além disso, podemos acrescentar as perdas por histerese e correntes parasitas no núcleo do estator, que vamos denominar por Piron. Assim, a potência de entrada da máquina supre essas perdas, mais
a potência necessária que deve ser transferida para o rotor através do entreferro entre o rotor e o estator.
Essa potência é denominada de potência de entreferro, que representamos anteriormente por Pgap. Portanto, se desejarmos calcular a potência nominal do motor, ou seja, a potência no eixo do motor, podemos reescrever a eq. 107-19 da seguinte forma:
eq. 107-20
Levando em consideração o que foi exposto acima, podemos encontrar a potência consumida pelo motor em relação à rede de alimentação.
eq. 107-21
Devemos relembrar que, eletricamente, a potência consumida pelo motor, levando em consideração o fator de potência (FP = cos φ), é dada pela eq. 107-23.
eq. 107-22
onde as variáveis envolvidas são:
Pin - potência de entrada do motor em watts;
VL - tensão de linha da rede de alimentação em volts;
IL - corrente de linha (IL = I1 conforme Figura 107-06) em ampére;
φ - ângulo de defasagem entre VL e IL.
Para completar este item vamos calcular a eficiência ou rendimento do motor, dada pela eq. 107-23.
Neste item vamos calcular a potência e o torque desenvolvido pelo motor de indução. Inicialmente, baseado no circuito da
Figura 107-06 e observando com atenção o circuito, é possível perceber que o único elemento que pode consumir a potência desenvolvida no entreferro é o resistor representado por R2 / s. Então, podemos expressar a potência no entreferro pela eq. 107-24.
eq. 107-24
As perdas no núcleo do rotor pode ser expressa pela eq. 107-25.
eq. 107-25
As perdas no cobre do rotor pode ser expressa pela eq. 107-26.
eq. 107-26
Note que substituindo a eq. 107-26 na eq. 107-24 facilmente concluímos que:
eq. 107-27
Depois que as perdas no cobre do estator, no núcleo e no cobre do rotor são
subtraídas da potência de entrada do motor, a potência restante é convertida da forma
elétrica para a mecânica. Essa potência convertida, algumas vezes denominada potência mecânica desenvolvida, é dada por
eq. 107-28
Se, na equação acima, substituirmos as variáveis pelos seus respectivos valores, conforme as equações eq. 107-24
e eq. 107-26, podemos escrever a eq. 107-28 após um trabalho algébrico, ou
eq. 107-29
Portanto, quanto menor o escorregamento do motor, menores serão as perdas no rotor da máquina. Observe também que,
se o rotor não estiver girando, o escorregamento
será s = 1 e a potência de entreferro será consumida inteiramente no rotor.
Note também que, associando as equações eq. 107-27 e eq. 107-28, podemos escrever outra relação entre a potência no entreferro e a potência mecânica, ou seja:
eq. 107-30
E, finalmente, se conhecemos as perdas por ventilação e atrito podemos calcular a potência de saída ou nominal do motor através da eq. 107-31.
eq. 107-31
Para concluir este item vamos calcular o torque que o motor desenvolve. Sabemos que o torque é dado pelo
quociente entre a potência e a velocidade angular. Então, vamos expressar essa quantidade em função da potência desenvolvida no entreferro e a velocidade angular síncrona dada através da eq. 107-32.
eq. 107-32
O torque dado pela eq. 107-32 é o torque induzido no rotor do motor. Não é o torque no eixo do motor. Este torque,
conhecido como torque nominal ou de saída, atua diretamente na carga. Por isso vamos denominá-lo de
τload, indicando que ele atua sobre a carga. E é dado pela eq. 107-33.
Parte da potência que flui no entreferro de um motor de indução é consumida como
perdas no cobre do rotor, representada pela fração s, enquanto a outra parte é convertida em potência mecânica para acionar o eixo do motor, representada pela fração 1 - s. Assim, é evidente que desta afirmativa vemos que um motor de indução operando com alto escorregamento é um motor extremamente ineficiente. Então, é possível separar
essas duas partes da potência de entreferro e
expressá-las separadamente no circuito equivalente do motor.
A eq. 107-24 fornece uma expressão da potência total de entreferro para
um motor de indução, ao passo que a eq. 107-26 dá as perdas reais no rotor do
motor. A potência de entreferro é a potência que seria consumida em um resistor de
valor R2 / s, ao passo que as perdas no cobre do rotor são expressas pela potência que
seria consumida em um resistor de valor R2. A diferença entre elas é Pmec e seria
a potência consumida em um resistor de valor conforme a eq. 107-33.
eq. 107-34
A Figura 107-07 mostra o circuito equivalente por fase onde se pode ver, na forma
de elementos distintos de circuito, as perdas no cobre do rotor e a potência convertida
para a forma mecânica.
Sabemos que a potência de entreferro é a potência que cruza a lacuna de ar existente entre
o circuito de estator e o de rotor. Ela é igual à potência absorvida na resistência R2 / s.
Uma maneira possível de encontrar essa potência é calcular a corrente do rotor, I2, pois já
estudamos a eq. 107-24 que nos fornece a potência total no entreferro. Por questões didáticas vamos repeti-la abaixo.
eq. 107-24
Assim, se houver uma maneira de determinar I2, então a potência de entreferro e o conjugado induzido
serão conhecidos. Uma das formas mais simples para determinar essa corrente é utilizando o equivalente Thévenin do
circuito que encontra-se à esquerda do circuito do rotor. Relembrando que o teorema de Thévenin afirma que qualquer circuito linear que pode ser separado por dois terminais
do resto do sistema, pode ser substituído por uma única fonte de tensão em série com uma
impedância equivalente. Se isso fosse feito com o circuito equivalente do motor de
indução, o circuito resultante seria uma combinação simples de elementos em série.
Para calcular o equivalente de Thévenin do lado da entrada do motor de indução, primeiro devemos eliminar o circuito do rotor, conforme mostra a Figura 107-08.
Figura 107-08
Para calcular a tensão de Thévenin podemos empregar um divisor de tensão. Denominando de Zx a soma de todos os componentes, temos:
eq. 107-35
Aplicando o divisor de tensão, obtemos:
eq. 107-36
Se houver interesse no cálculo do módulo da tensão de Thévenin, então devemos definir o módulo da impedância
Zx, que vamos representar como Zx2, conforme a equação eq. 107-37.
eq. 107-37
Desta forma, o módulo da tensão de Thévenin é dado pela eq. 107-38.
eq. 107-38
Porém, levando em consideração que ( X1 + Xm )2 >> R12 , podemos reescrever a eq. 107-38 conseguindo uma ótima aproximação através da eq. 107-39.
eq. 107-39
Podemos definir a fração que aparece na eq. 107-39 como Kth = Xm / X1 + Xm. Então, podemos escrever:
eq. 107-40
Para calcular a impedância de Thévenin vamos defini-la como ZTH = RTH + j XTH. O circuito utilizado para o cálculo é apresentado na Figura 107-09, onde a fonte de tensão VF foi curto-circuitada para ser possível aplicar o teorema de Thévenin.
Figura 107-09
Então, para encontrarmos o valor de ZTH devemos encontrar o paralelo das impedâncias mostradas no circuito. Logo, aplicando a regra básica de duas impedâncias em paralelo, temos:
eq. 107-41
Novamente, considerando que ( X1 + Xm )2 >> R12 podemos
aproximar a eq. 107-41 pela eq. 107-42, ou seja:
eq. 107-42
Como definimos anteriormente a variável Kth, então podemos escrever a eq. 107-42 como:
eq. 107-43
E, considerando que ( X1 + Xm )2 >> R12 podemos escrever a equação
que aproxima o valor de XTH.
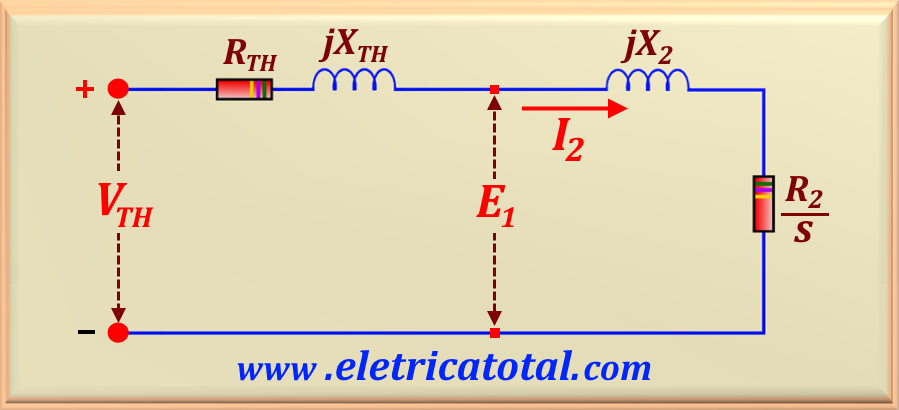
Com o cálculo do equivalente de Thévenin no item anterior, podemos mostrar o circuito equivalente do motor de indução conforme mostra a Figura 107-10.
Figura 107-10
Com o modelo do circuito equivalente facilmente calculamos o valor de I2. Para isso vamos encontrar a impedância equivalente de todo o circuito.
eq. 107-45
Portanto, para calcularmos o valor de I2 basta aplicar a lei de Ohm, ou:
eq. 107-46
E para encontrarmos o módulo da corrente I2 vamos definir a variável |Zeq|
através da eq. 107-47.
eq. 107-47
Dessa forma podemos encontrar o módulo da corrente I2 usando a eq. 107-48.
eq. 107-48
Vamos relembrar que a potência no entreferro do motor é dado pela eq. 107-24, repetida abaixo.
eq. 107-24
Para calcularmos essa potência vamos definir a variável Z'eq dado pela eq. 107-49 abaixo.
eq. 107-49
Substituindo na eq. 107-24 o valor de I2 dado pela eq. 107-48, vamos
encontrar a potência de entreferro em função dos valores do equivalente de Thévenin. Logo:
eq. 107-50
Vamos relembrar que o torque induzido do motor é dado pela eq. 107-32, repetida abaixo.
eq. 107-32
Substituindo na eq. 107-32 o valor de Pgap dado pela eq. 107-50, vamos encontrar
o torque induzido do motor em função dos valores do equivalente de Thévenin. Assim:
eq. 107-51
A Figura 107-11 mostra um gráfico do torque de um motor de indução em
função da velocidade (e do escorregamento).
Figura 107-11
Do gráfico mostrado na Figura 107-11 podemos tirar as seguintes informações:
1. - O conjugado induzido do motor é zero na velocidade síncrona;
2. - A curva de conjugado versus velocidade é aproximadamente linear entre carga
a vazio e plena carga. Nessa faixa, a resistência do rotor é muito maior do que
sua reatância. Desse modo, a corrente do rotor, o campo magnético do rotor e o
conjugado induzido aumentam linearmente com o escorregamento crescente;
3 - Há um conjugado máximo possível que não pode ser excedido. Esse conjugado,
denominado conjugado máximo, é 2 a 3 vezes o conjugado nominal de plena
carga do motor;
4 - O conjugado de partida do motor é ligeiramente superior a seu conjugado de
plena carga, de modo que esse motor colocará em movimento qualquer carga
que ele puder acionar a plena potência;
5 - Observe que o conjugado do motor para um dado escorregamento varia com o
quadrado da tensão aplicada. Esse fato é útil em uma das formas de controle de
velocidade dos motores de indução.
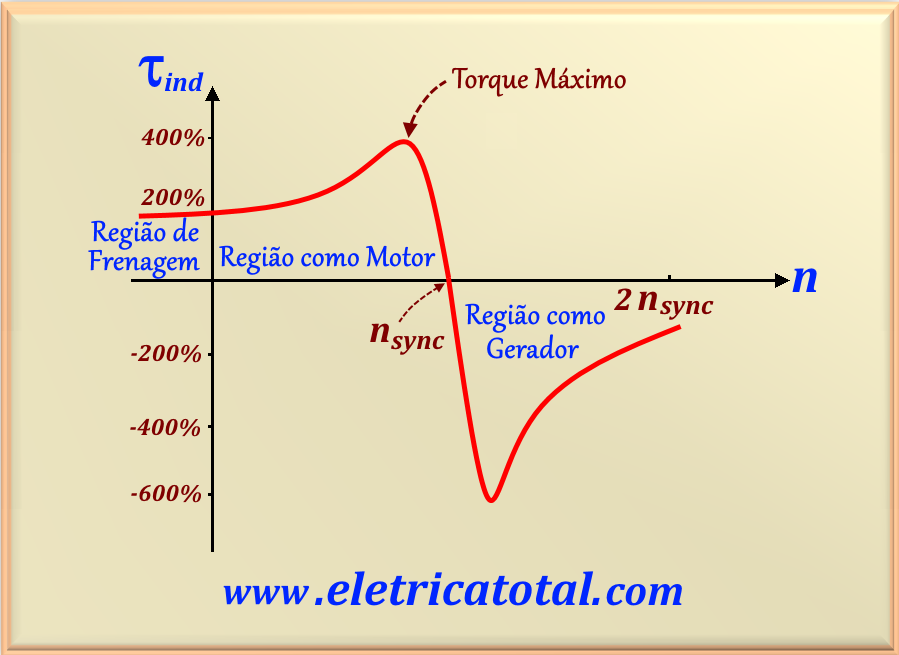
A Figura 107-12 mostra uma curva característica de conjugado versus velocidade de um motor de indução, mostrando as faixas estendidas de operação, onde se vê a região de frenagem e a região como gerador.
Figura 107-12
Observando o gráfico mostrado na Figura 107-12 podemos tirar as seguintes conclusões:
1. - Se o rotor do motor de indução for acionado mais rapidamente do que a velocidade síncrona, então o sentido do conjugado induzido inverte-se e a máquina torna-se um gerador, convertendo potência mecânica em elétrica;
2. - Se o motor estiver girando para trás em relação ao sentido dos campos magnéticos, então o conjugado induzido na máquina freará a máquina muito rapidamente
e tentará fazer com que ela gire no sentido oposto. Como a inversão do sentido
de rotação do campo magnético é simplesmente uma questão de chaveamento de
duas fases quaisquer do estator, esse fato pode ser usado para frear muito rapidamente um motor de indução. O ato de permutar duas fases por chaveamento, para frear o motor muito rapidamente, é denominado frenagem por inversão de fases.
Como o conjugado induzido é dado pela eq. 107-32, o conjugado máximo possível ocorre quando a potência de entreferro é máxima. Como a potência de entreferro é igual à
potência consumida no resistor R2 /s, o conjugado máximo induzido ocorrerá quando
a potência consumida por esse resistor for máxima.
Em uma situação na qual o ângulo da impedância de carga é fixo, o teorema da transferência máxima de potência afirma que
essa transferência máxima de potência para o resistor de carga R2 /s ocorrerá quando
o valor da impedância for igual ao valor da impedância da fonte. O módulo da impedância da fonte, Zf, é dada pela eq. 107-52.
eq. 107-52
Logo, a transferência máxima de potência ocorre quando R2 /s = Zf. Dessa relação
podemos encontrar o escorregamento para conjugado máximo, smax, fazendo uma manipulação algébrica na relação mostrada
neste parágrafo e chegando a eq. 107-53.
eq. 107-53
Observe que a resistência de rotor referida R2 aparece apenas no numerador. Assim,
o escorregamento do rotor no conjugado máximo é diretamente proporcional à resistência do rotor.
O valor do conjugado máximo pode ser encontrado inserindo a expressão para
o escorregamento de conjugado máximo na equação de conjugado conforme a eq. 107-51.
Assim, a equação resultante de conjugado máximo é
eq. 107-54
Esse conjugado é proporcional ao quadrado da tensão de alimentação e relaciona-se
também com o inverso das impedâncias de estator e de rotor. Quanto menores forem
as reatâncias de uma máquina, maior será o conjugado máximo que ela é capaz de
alcançar. Observe que o escorregamento para o qual ocorre o conjugado máximo é
diretamente proporcional à resistência do rotor, R2, mas o valor do conjugado máximo independe do valor dessa resistência conforme a eq. 107-54.
Em muitos casos, a partida dos motores de indução pode ser
feita simplesmente ligando-os diretamente à linha de potência. Isso só é possível se o motor é de baixa potência, no máximo 10 HP. Entretanto, algumas
vezes há razões para não proceder assim. Por exemplo, a corrente de partida pode
causar tal queda de tensão temporária no sistema de potência que torna inaceitável a
partida com ligação direta à linha. Esse é o caso de motores de alta potência, acima de 10 HP.
No caso de motores de indução de enrolamento bobinado, a partida pode ser
feita com correntes relativamente baixas inserindo resistências extras no circuito do
rotor durante a partida. Essas resistências não só aumentam o conjugado de partida,
como também reduzem a corrente de partida.
No caso de motores de indução de gaiola de esquilo, a corrente de partida pode
variar amplamente dependendo fundamentalmente da potência nominal do motor e da
resistência efetiva do rotor nas condições de partida. Para estimar a corrente do rotor
nas condições de partida, todos os motores de gaiola têm agora uma letra de código
de partida (não confundir com a letra da sua classe de projeto) nas suas placas de
identificação. A letra de código especifica limites para a quantidade de corrente que o
motor pode consumir na partida.
Esses limites são expressos em termos da potência aparente de partida do motor
em função da sua especificação nominal de potência (HP). A Tabela 107-01 é uma tabela que contém os
quilovolts-ampères por HP para cada letra de código.
Tabela 107-01
Letra do Código de Partida
Rotor Bloqueado, kVA/HP
A
0 a 3,15
B
3,15 a 3,55
C
3,55 a 4,00
D
4,00 a 4,50
E
4,50 a 5,00
F
5,00 a 5,60
G
5,60 a 6,30
H
6,30 a 7,10
J
7,10 a 8,00
K
8,00 a 9,00
L
9,00 a 10,00
M
10,00 a 11,20
N
11,20 a 12,50
P
12,50 a 14,00
R
14,00 a 16,00
S
16,00 a 18,00
T
18,00 a 20,00
U
20,00 a 22,40
V
22,40 e acima
Como Usar a Tabela
Vamos considerar o seguinte exemplo. Seja um motor de indução trifásico de 20 HP operando em 220 V e
código de partida com a letra F.
De acordo com a Tabela 107-01, o máximo de quilovolts-ampére por HP é 5,6. Logo, o máximo de quilovolts-ampére
de partida deste motor é:
Sstart = 15 (HP) x 5,6 = 84 kVA
Então, a corrente de partida do motor será:
IL = Sstart / √3 VT = 84 kVA / √3 x 220 V
Efetuando o cálculo, encontramos:
IL = 220 A
Quando a corrente de partida é muito alta, há necessidade de se reduzir adotando um circuito de partida adequado. Porém, devemos considerar que quando reduzimos a corrente de partida o conjugado de partida do motor também será reduzido.
Vamos estudar algumas alternativas para resolver esse problema.
É normal que os fabricante forneçam seus motores de maior potência com seis terminais, onde cada dois terminais representam o enrolamento de uma fase. Neste caso, é possível conectar o motor em uma ligação Delta ou Estrela. Então, uma maneira de se reduzir a corrente de partida de um motor de indução é conectá-lo na configuração Estrela no ato da partida. Depois que o motor alcançar uma rotação próxima da rotação de trabalho, muda-se a conexão para uma configuração Delta. Este procedimento é viável, pois na conexão Estrela a tensão sobre o enrolamento de fase do motor é igual a tensão de linha dividido pelo fator √3 menor. Dessa forma, com uma tensão menor em seus terminais a corrente de partida é reduzida pelo
fator √3. Em geral, podemos afirmar que o torque de partida varia com o quadrado da tensão aplicada por fase.
Dessa forma, em uma ligação estrela, a tensão de fase é 1 / √3 a tensão de linha. Logo, o torque é reduzido em
3 vezes em relação à ligação delta.
Assim, uma corrente menor vai produzir um torque de partida menor. Quando for possível dar partida ao motor com uma corrente
de partida de aproximadamente 58% da corrente de partida nominal, este método, que é razoavelmente de baixo custo, é
frequentemente empregado.
O chaveamento da conexão Estrela para a conexão Delta deve ser feito tão rápido quanto possível para eliminar grandes correntes transitórias devido à momentânea perda de potência. Por esta razão, dar-se-á preferência às chaves com mola acoplada, de dupla posição, em detrimento as chaves simples tipo faca.
Neste caso, é possível usar autotransformadores para reduzir a tensão de alimentação do motor. Quando o motor atingir uma rotação próxima da rotação de operação, retira-se o autotransformador do circuito e o motor passa a ser alimentado diretamente pela rede.
Devemos entender que ao reduzirmos a tensão de alimentação a corrente também diminui na mesma proporção. No entanto, o conjugado (torque) de partida diminui com o quadrado da tensão aplicada. Assim, ao aplicarmos esta técnica é importante verificar se a corrente de partida produz o torque necessário para dar partida à carga acoplada ao eixo do motor.
O desenvolvimento do rotor de gaiola dupla criou uma tal versatilidade em relação ao projeto dos motores de indução que conduziu a uma variedade de características torque-escorregamento. Ajustando convenientemente o enrolamento de gaiola dupla, os fabricantes desenvolveram numerosas variantes do projeto de rotor fundido único ou normal. Para distinguir entre os vários tipos disponíveis, a Associação Brasileira de Normas Técnicas (ABNT), com base em estudos da National Electrical Manufacturer's Association (NEMA), adotou um sistema de código alfabético, no qual cada tipo de motor de indução de rotor em gaiola se situa numa certa categoria designada por uma letra.
Basicamente existem quatro tipos de motor de indução. Temos as classes A, B, C e D. Vamos
descrevê-las separadamente.
O motor da classe A é um motor de indução do tipo gaiola normal construído para uso em velocidade normal. A reatância
X2 do circuito equivalente de um motor de indução representa a forma
referida ao estator da reatância de dispersão do rotor. Em geral, quanto mais distante do estator estiver a barra
de rotor, ou uma parte sua, maior será a reatância de dispersão, porque uma porcentagem menor do fluxo da barra alcançará o estator. Portanto, se as barras de um rotor de
gaiola de esquilo forem colocadas próximas da superfície do rotor, elas terão apenas
um pequeno fluxo de dispersão e a reatância X2 será pequena no seu circuito equivalente. Por outro lado, se as barras forem colocadas mais profundamente na superfície
do rotor, haverá mais dispersão e a reatância do rotor X2 será maior.
Fazendo as barras do rotor com um tamanho grande e posicionadas próximas à superfície do rotor, essa forma construtiva apresentará uma resistência baixa (devido à sua seção reta grande) e uma reatância de dispersão (X2)
baixa (devido à localização da barra próximo do estator). Como a resistência do rotor
é baixa, o conjugado máximo estará bem próximo da velocidade síncrona (veja a eq. 107-53) e o motor será bem eficiente.
Devido a boa eficiência desse motor , muito pouco da potência de entreferro será perdida na resistência do rotor.
Entretanto, como R2 é pequena, o conjugado de partida do motor está situado entre 1,5 a 2 vezes o conjugado nominal a plena carga. E a sua
corrente de partida será elevada, variando entre 5 a 7 vezes a corrente nominal, tornando-o menos desejável para partida direta, principalmente para motores com potência superior a 5 HP.
Esse tipo de forma construtiva é denominado classe A
de projeto pela National Electrical Manufacturers Association (NEMA). É aproximadamente um motor de indução típico, sendo as suas características basicamente as mesmas de um motor de rotor bobinado sem inserção de resistência extra.
Sua característica de conjugado versus velocidade está mostrada na Figura 107-13.
Os motores da classe B possuem um conjugado de partida pouco abaixo do normal, um baixo escorregamento e uma corrente de partida menor. Essa classe possui um enrolamento mais profundamente engastado nas ranhuras do rotor ocasionando com isso um aumento
na reatância de partida do motor. O aumento na reatância de partida reduz um pouco o torque de partida, mas reduz também a
corrente de partida. Atualmente, os motores da classe B vêm substituindo os motores da classe A.
Os motores da classe C têm um conjugado de partida elevado, baixa corrente de partida e baixo escorregamento (inferior a 5%) com plena carga. O conjugado máximo é ligeiramente inferior ao dos motores da classe A, ao passo
que o conjugado de partida é até 250% o conjugado a plena carga. Esses motores são
construídos com rotores de dupla gaiola de esquilo, de modo que eles são mais caros
do que os motores das classes anteriores. Eles são usados para cargas com elevados
conjugados de partida, como bombas, compressores e esteiras transportadoras, todos
inicialmente já carregados. Entretanto, quando usados com cargas de elevada inércia possuem uma dissipação térmica limitada.
Os motores da classe D têm um conjugado de partida muito
elevado (275% ou mais o conjugado nominal) e uma corrente de partida baixa. Eles
também têm um escorregamento elevado com plena carga. São basicamente motores
de indução comuns da classe A, cujas barras de rotor são menores e feitas de um material de maior resistividade. A alta resistência do rotor desloca o conjugado de pico
até uma velocidade muito baixa. Por isso esses motores são conhecidos como motor com rotor de alta resistência.
O escorregamento de plena carga desses
motores é bem elevado, devido à elevada resistência de rotor; tipicamente, é de 7 a
11%, mas podem chegar até 17% ou mais. Esses motores são usados em aplicações
que exigem a aceleração de cargas com inércia extremamente elevada, especialmente
os grandes volantes usados em prensas de perfuração, estampagem ou corte.