3. - Respuesta del Circuito RLC Série al SaltoHaga clic aquí!
Ahora veamos el comportamiento de un circuito RLC cuando sus componentes están conectados en serie. Los métodos para determinar su respuesta natural son similares a los utilizados en el caso del circuito paralelo RLC.
Requisitos previos - Para estudiar esto en este capítulo es esencial tener un buen conocimiento de las ecuaciones diferenciales de 1er y 2do orden.
Cuando estudiamos ecuaciones diferenciales, aprendemos que hay dos respuestas posibles: una llamada
natural o homogénea; el otro llamado forzado o no homogéneo. Comencemos estudiando la forma más simple, a saber, la respuesta natural o homogénea.
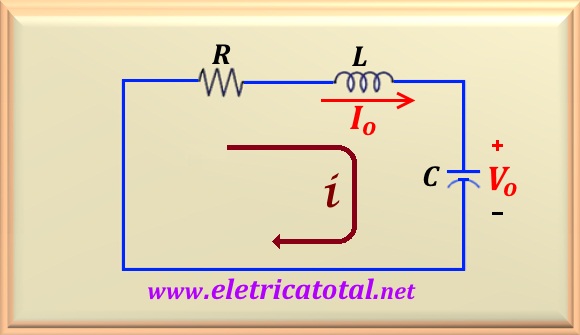
Para este propósito, considere un circuito RLC con todos sus elementos conectados en serie, como
ilustra la Figura 25-01.
Figura 25-01
Para analizar el circuito, supongamos que tanto el condensador como el inductor pueden tener una energía inicial almacenada, sea una corriente de inductor o un voltaje de condensador, ambos con valores iniciales distintos de cero. En el circuito anterior, estas condiciones iniciales se representan de la siguiente manera:
i (0+) = Io y v(0+) = Vo
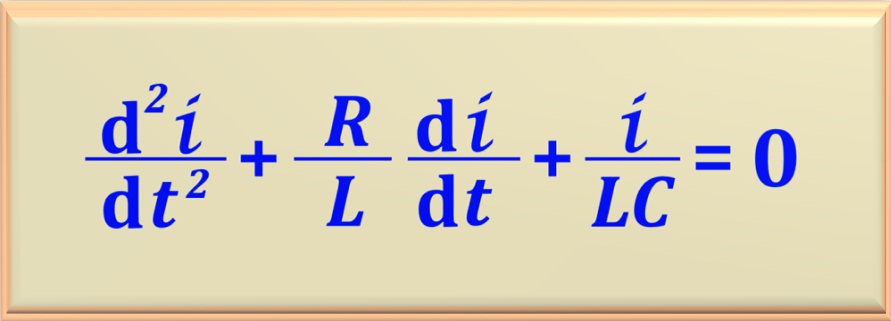
La aplicación de los conceptos de ecuación diferencial al circuito produce una ecuación diferencial lineal homogénea de segundo orden. Observe la siguiente ecuación:
eq. 25-01
De la ecuación anterior podemos determinar la llamada ecuación característica de la ecuación
diferencial como se muestra a continuación.
r 2 + (R / L) r + 1 / LC = 0
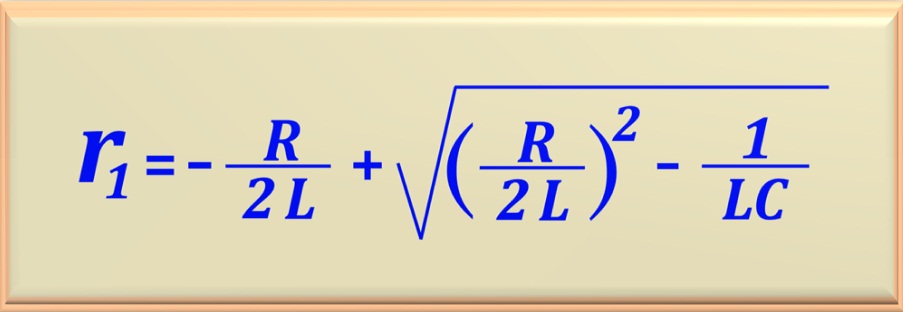
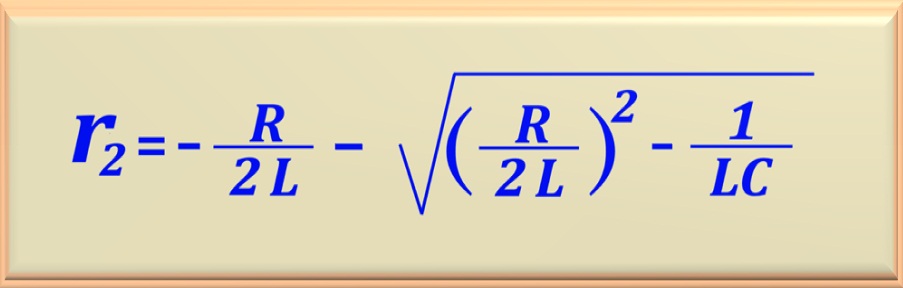
La solución obtenida para i(t) depende de las raíces de esta ecuación de segundo grado. Entonces las dos raíces son:
eq. 25-02
eq. 25-03
Ahora que tenemos los valores raíz de la ecuación, podemos escribir la solución de la ecuación diferencial. Esto está dado por:
eq. 25-04
Tenga en cuenta que las raíces de la ecuación característica (r1 y
r2) están determinados por los parámetros del circuito, R, L e C.
Los valores de las constantes. A1 y A2
están determinadas por las condiciones iniciales del problema. Por lo tanto, podemos decir que la solución
general de eq. 25-01 tiene la forma de eq. 25-04.
Por lo tanto, para encontrar la solución del problema, debemos encontrar las raíces de la ecuación
característica como primer paso, ya que el comportamiento de i(t) depende de los valores de estas raíces.
Tenga en cuenta que la primera porción es la respuesta del circuito debido a la primera raíz, r1.
La segunda porción es la respuesta del circuito debido a la segunda raíz, r2. Podemos llamarlos soluciones i1 y
i2, respectivamente. Si i1 y
i2 son soluciones, por lo que sabemos que su suma también es una solución.
Eso es lo que estás diciendo a eq. 25-04.
Al igual que con el circuito paralelo RLC , aquí también definimos dos nuevos parámetros para
reescribe las ecuaciones de las dos raíces de manera más sucinta. El primer parámetro
llamado frecuencia de Neper o coeficiente ou factor de amortiguación, está representado por la letra griega alfa, α. El segundo parámetro,
llamado frecuencia angular resonante o frecuencia de resonancia no amortiguada,
está representado por la letra griega, ωo.
Entonces podemos escribirlos como:
eq. 25-05
eq. 25-06
Observe que el parámetro alfa - α del circuito serie RLC difiere del circuito paralelo RLC. Sin embargo, el otro parámetro es exactamente el mismo. Entonces, escribamos las ecuaciones raíz en función de estos dos nuevos parámetros, o:
eq. 25-07
eq. 25-08
Haciendo una analogía con lo que se estudió en las ecuaciones en la escuela secundaria , aquí también nos damos cuenta de que hay tres posibles resultados para la radicación.
Positivo - cuando α > ωo
Cero - cuando α = ωo
Negativo - cuando α < ωo
Estas tres posibilidades dan lugar a tres tipos diferentes de respuesta de circuito. Y cada tipo de respuesta recibe un nombre que lo identifica.
Así que echemos un vistazo más de cerca a cada caso.
Esta respuesta se obtiene cuando α > ωo. Podemos resumir el procedimiento requerido para
determinar la respuesta de un circuito sobre amortiguado
de un circuito serie RLC, que está perfectamente descrito por eq. 25-04.
1 - Encuentra las raíces de la ecuación característica, r1 y r2, conociendo
los valores de R, L y C.
2 - Determinar i(0+) y di(0+) utilizando los métodos de análisis de
circuitos previamente estudiados.
3 - Calcule los valores de A1 e A2 resolviendo el sistema de ecuaciones que
consiste en las siguientes ecuaciones.
i(0+) = I0 = A1 + A2
di (0+) / dt = Vo / L =
r1 A1 + r2 A2
4 - Reemplazando los valores de r1, r2,
A1 y A2 en la eq. 25-04 obtener expresión de v(t)
para t ≥ 0.
Esta respuesta ocurre cuando α = ωo, y por lo tanto las raíces de la ecuación
características son reales y iguales. Esta es la situación en la que se alcanza el estado final lo más rápido
posible sin oscilación en el sistema. En este caso, las raíces de la ecuación característica son:
eq. 25-09
Por lo que se ha estudiado en la disciplina ecuaciones diferenciales, sabemos que cuando las raíces de la ecuación característica son iguales, no podemos expresar la solución en términos de
eq. 25-04. Entonces la solución debe tomar la forma de una suma de dos términos: el primer término es un exponencial simple y el segundo término es el producto de la variable independiente por un exponencial. Entonces la respuesta del sistema viene dada por la siguiente ecuación.
eq. 25-10
Para determinar los valores de B1 y B2, Usamos el mismo método que el artículo anterior. Así, tenemos las relaciones:
i(0+) = I0 = B1
di(0+) / dt = Vo / L =
B2 - α B1
Con el valor de α dado por eq. 25-08 y con los valores de B1
y B2, podemos reemplazarlos en eq. 25-09 y encuentre la solución de ecuación del circuito.
Cuando α < ωo, Las raíces de la ecuación característica son complejas.
Entonces decimos que la respuesta del circuito es sin amortiguar.
Basado en eq. 25-06 y eq. 25-07, reescribamos más convenientemente
haciendo el siguiente cambio:
eq. 25-11
Recordando que podemos escribir j = √-1, para que podamos reescribir eq. 25-10 como:
eq. 25-12
Tenga en cuenta que hemos redefinido la radicación mediante un nuevo parámetro llamado frecuencia angular amortiguada, ωd, de acuerdo con eq. 25-12 abajo.
eq. 25-13
Por lo tanto, podemos escribir la respuesta de un circuito RLC serie no amortiguado. La siguiente ecuación es el resultado de algunas transformaciones y el uso de algunas propiedades de números complejos.
eq. 25-14
Las constantes B1 y B2 son números reales. Estos coeficientes son
determinado como lo hicimos para los otros dos casos. Calculamos i(0+) y
su primera derivada para t = 0+. En resumen tenemos:
i(0+) = I0 = B1
di(0+) / dt = Vo / L =
- α B1 + ωd B2
Por eq. 25-13 nos damos cuenta de que la respuesta es oscilatoria debido a términos trigonométricos, es decir, el voltaje varía entre valores positivos y negativos. La frecuencia con la que ocurren estas oscilaciones depende del valor de ωd. Por otro lado, debido a la presencia de la función exponencial, la amplitud de las oscilaciones disminuye con el tiempo. La rapidez con que disminuye la amplitud de las oscilaciones depende de α. Por esta razón, el parámetro
α se denomina factor de amortiguación o coeficiente de amortiguación. Esto también explica por qué el parámetro ωd se llama
frecuencia angular amortiguada.
Cabe señalar que en ausencia de amortiguación, tenemos α = 0 y la frecuencia de las oscilaciones es ωo. En presencia de elemento disipativo, R en el circuito,
α ≠ 0 y, en consecuencia, ωd < ωo.
Entonces, cuando α es diferente de cero, decimos que la frecuencia de oscilación es
amortiguada.
Cabe señalar que todos los cálculos realizados en el elemento anterior, el circuito no tenía ningún tipo de fuente de alimentación.
Ahora estudiemos el comportamiento del circuito cuando contiene fuentes de energía.
Para obtener la respuesta de un circuito RLC a una función salto, Inicialmente debemos determinar la ecuación de la
respuesta natural. Después de eso, podemos determinar el voltaje entre los terminales de cualquiera de los elementos, ya que la
ecuación diferencial que describe el comportamiento del voltaje del capacitor tiene la misma forma que la ecuación diferencial que
describe el comportamiento de la corriente del inductor.
El método utilizado para el circuito RLC paralelo puede aplicarse al caso del circuito
serie RLC.
La solución de la ecuación diferencial de segundo orden, con una función de fuerza en la segunda extremidad, es igual a
la suma de la respuesta natural con la respuesta forzada. Por lo tanto, para la función salto que tiene un valor constante, la
solución se puede escribir como:
eq. 25-15
Esto es para el caso de la curriente. En el caso del voltaje, el formato es el mismo. Entonces
eq. 25-16
Donde If y Vf representa el valor final de la corriente y el voltaje en la función de respuesta.